



模型参考自适应系统(Model Reference Adaptive System,MRAS)的思想是采用参考模型,在控制过程中,系统不断检测被控系统的状态、性能以及参数,并实时将系统当前的运行指标与期望指标相比较,进而做出决策,通过自适应律来改变控制器的结构与参数,以保证系统运行在其定义的最优状态。模型参考自适应系统设计的关键是自适应律的选取,自适应律的设计通常使用3种方法:①以局部参数最优化理论为基础的设计方法;②以李雅普诺夫稳定性理论为基础的设计方法;③以波波夫(Popov)稳定性理论为基础的设计方法。考虑到设计的模型参考自适应系统的稳定性,设计自适应律通常以波波夫稳定性理论为基础。
一个典型的模型参考自适应系统由参考模型、可调模型和自适应机构3部分组成。从类型来分可以分为并联型、串联型和串并联型。实际建模中使用最多的是并联型模型参考自适应系统。如图5-24所示,参考模型和可调模型具有相同的外部输入激励u(x),而Xm(t)和Xs(t)分别是参考模型和可调模型的状态输出,系统将Xm(t)和Xs(t)比较后得出的误差e(t)输入自适应机构,通过自适应机构去调节可调模型的参数,使Xs(t)快速逼近Xm(t),也就是误差e(t)趋近于零。
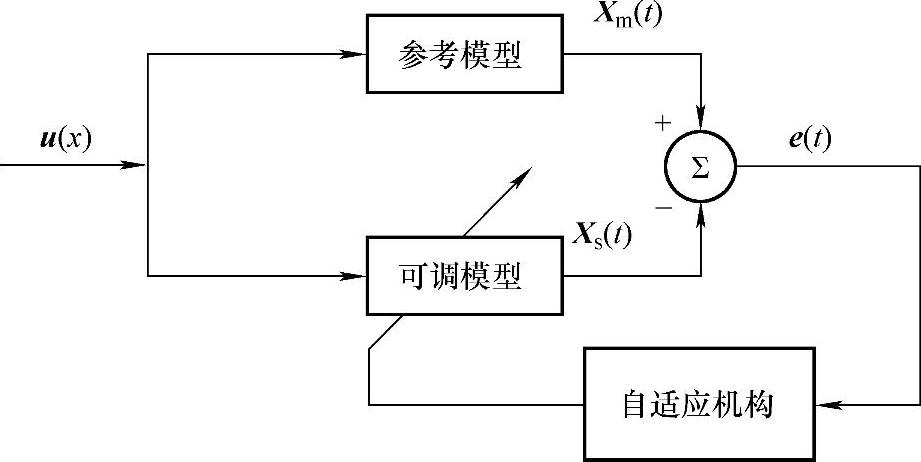
图5-24 模型参考自适应系统控制框图
图5-24所示为并联型模型参考自适应系统控制框图,假设其参考模型的状态方程为

式中,Xm(0)=Xm0,Xm(t)为n维状态向量,u(t)为m维输入向量,Am为n·n维矩阵,Bm为n·m维矩阵。
可调模型的状态方程为

式中,A(e,0)=A0,B(e,0)=B0,Xs(0)=Xs0,Xs(t)为n维状态向量,u(t)为m维输入向量,A(e,t)为n·n维时变矩阵,B(e,t)为n·m维时变矩阵。状态方程系统框图如图5-25所示。
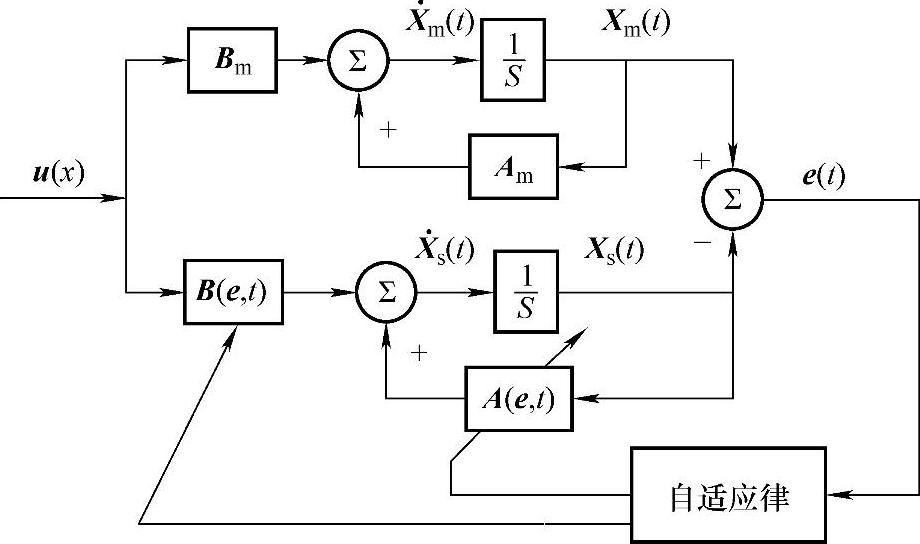
图5-25 状态方程系统框图
系统状态误差为
e(t)=Xm(t)-Xs(t) (5-67)
模型参考自适应系统确立参考模型和可调模型后,设计合适的自适应率,使 ,同时可调模型中的矩阵系数应满足
,同时可调模型中的矩阵系数应满足

由式(5-65)和式(5-66)可得

式中,η(t)=(A(e,t)-Am)Xs(t)+(B(e,t)-Bm)u(t)。
等价误差系统如图5-26所示,上半部分为线性部分,下半部分为非线性时变部分,当误差e(t)为零时,等价误差系统稳定。在多数情况下,要使前向通道线性部分的传递函数为严格正实函数是很困难的,为此在前向通道上设置了一个线性补偿器D,使e′(t)=De(t),此时线性部分的稳定性取决于Am和D,可通过D来设置线性部分的严格正实性。对于非线性时变部分,当线性部分增加线性补偿器D后,相应的输入要改变。可调矩阵变为A(e′,t)和B(e′,t),相应的可调参数也要改变。在自适应率的作用下,A(e′,t)和B(e′,t)逐渐趋近于Am和Bm,多采用比例-积分器作为自适应率。
根据永磁辅助同步磁阻电机d、q轴数学模型,结合式(5-11)和式(5-12)可以得出d、q轴电流状态方程
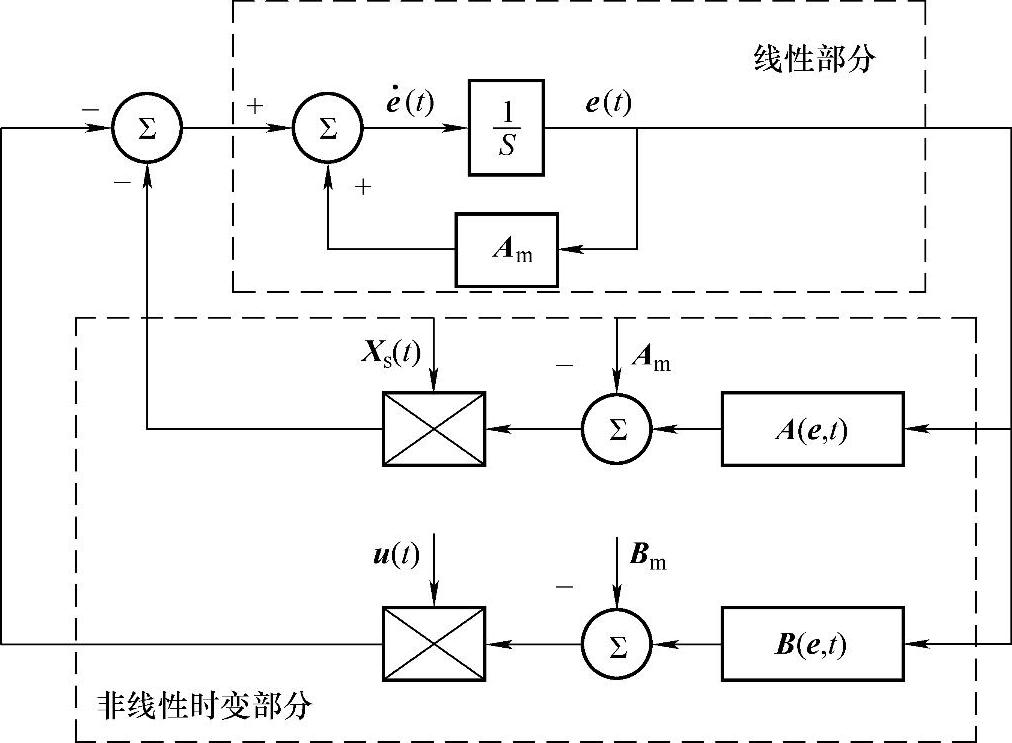
图5-26 等价误差系统

式(5-70)电流状态方程中含有转子速度信息,可选电机本体为参考模型,电流模型为可调模型,对状态仿真稍作处理。

可以得到

式中

根据参考模型可以建立可调模型(https://www.xing528.com)

式中

根据参考模型和可调模型,定义广义误差为

式(5-71)减去式(5-73)得到
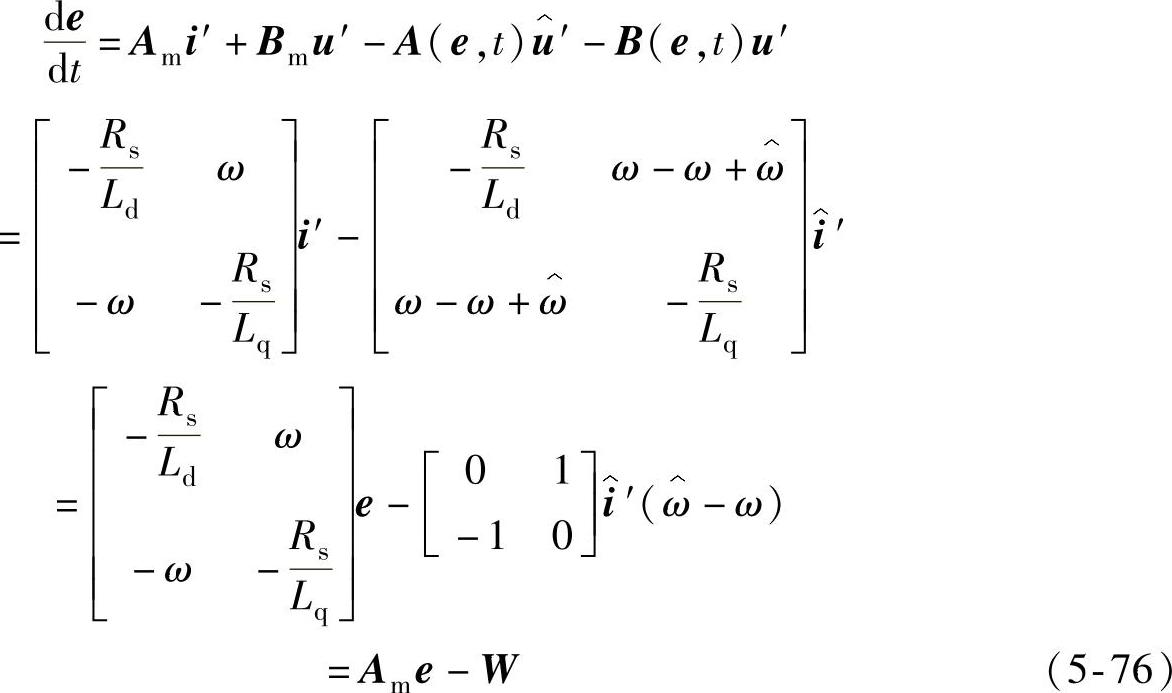
式中,W为 ,J为
,J为 。
。
这样就构成了模型参考自适应的反馈系统,如图5-27所示,因为Am正定矩阵的稳定条件只要满足式(5-76),模型参考自适应的反馈系统就是稳定的。

图5-27 模型参考自适应反馈系统

式中,r20是一个有限正数。
要满足式(5-77),通常采用比例-积分器作为自适应率。

式中, 为初始值,将式(5-78)代入式(5-77)得到
为初始值,将式(5-78)代入式(5-77)得到

要使ψ(0,t1)≥-r20,可以分别使

式中,r21和r22分别为有限的正数,对于任意函数f(t),都会存在以下不等式:

这里假设

对式(5-84)两边求导可以求出

同理可以求出

假设 (0)为零,将式(5-85)和式(5-86)代入式(5-78)得到
(0)为零,将式(5-85)和式(5-86)代入式(5-78)得到
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。