



由于永磁辅助同步磁阻电机是一个多变量、强耦合和非线性的复杂系统,因此必须经过坐标变换将三相静止坐标系abc下的数学模型转换成两相旋转坐标系dq下的数学模型才能实现电流的解耦控制。永磁辅助同步磁阻电机的坐标系包括三相静止坐标系abc、两相静止坐标系αβ和两相旋转坐标系dq,如图5-1所示。
常用的坐标变换有4种。
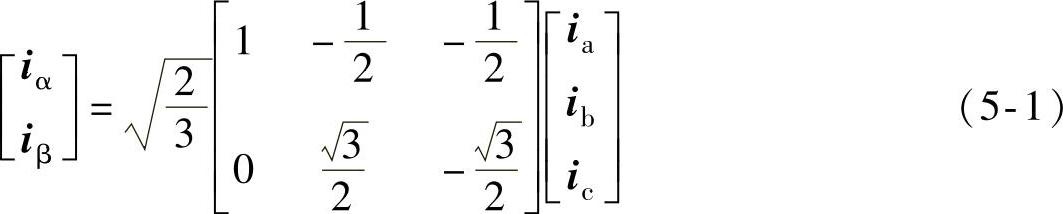
1.三相静止坐标系-两相静止坐标系(Clarke变换)
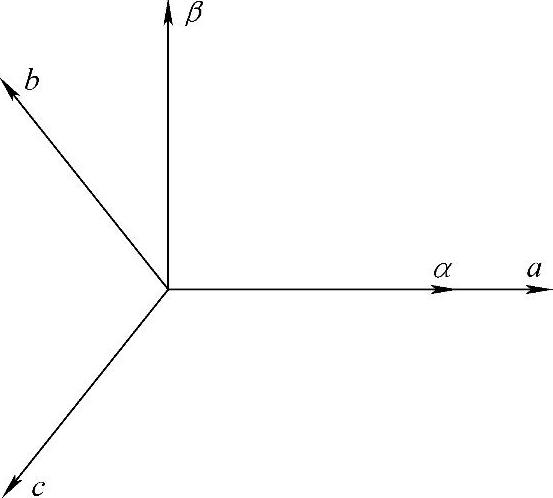
在三相静止坐标系下,定子电流ia、ib、ic互差120°,且满足ia+ib+ic=0,根据三相磁动势和两相磁动势相等原理,可以将三相电流ia、ib、ic投影到两相电流iα、iβ上,α轴与a轴重合,如图5-2所示。这种变换称为Clarke变换,变换矩阵如下:
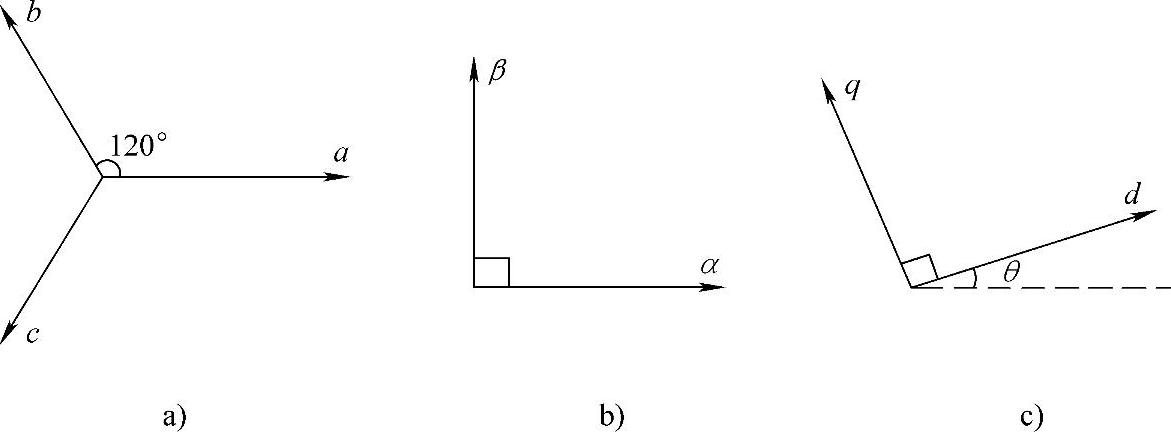
图5-1 永磁辅助同步磁阻电机坐标系
a)三相静止坐标系abc b)两相静止坐标系αβ c)两相旋转坐标系dq
2.两相静止坐标系-两相旋转坐标系(Park变换)
在永磁辅助同步磁阻电机中,αβ坐标系相对定子是静止的,而转子相对定子以设置转速在旋转,αβ坐标系要转换成与转子同步旋转的dq坐标系。在定子中电流矢量为is,is可以投影到αβ坐标系,分解成iα和iβ,也可以投影到dq坐标系,分解成id和iq,id相当于励磁电流分量,iq相当于转矩电流分量。d轴与α轴的夹角为θ,如图5-3所示。这种变换称为Park变换,变换矩阵如下:
 (https://www.xing528.com)
(https://www.xing528.com)
图5-2 Clarke变换
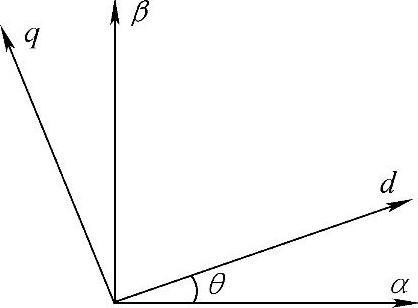

图5-3 Park变换
3.两相旋转坐标系-两相静止坐标系(反Park变换)
Park变换和Clarke变换一般应用在三相电流ia、ib、ic分解成id、iq,而反Park变换和反Clarke变换一般应用在ud、uq合成三相电压ua、ub、uc,从而准确计算出电机运行所需要的电压矢量。两相旋转坐标系到两相静止坐标系是将dq坐标系的电压矢量转换成αβ坐标系的电压矢量,这种变换称为反Park变换,变换矩阵如下:

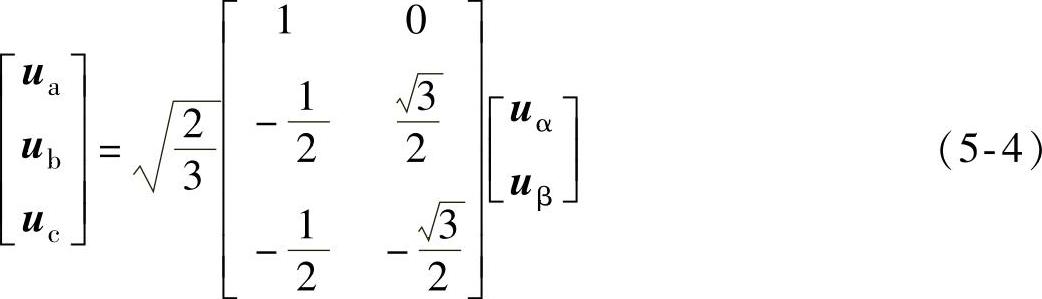
4.两相静止坐标系-三相静止坐标系(反Clarke变换)
两相静止坐标系转换成三相静止坐标系是将αβ坐标系的电压矢量转换成abc坐标系的电压矢量,再经过计算输出开关量给驱动模块生成相应的电压来驱动电机,这种变换称为反Clarke变换,变换矩阵如下:
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。