



1.“控制器正反作用”方式的定义
正作用(Direct Action):随着被控过程输出测量信号的增加,调节器输出也增加。
DIR算法:e(kT)=y(kT)-r(kT) (5-3-12)
反作用(Reverse Action):随着被控过程输出测量信号的增加,调节器输出减小。
REV算法:e(kT)=r(kT)-y(kT) (5-3-13)
图5-3-5描述了控制器正反作用情况下系统运行曲线,其中PV表示被控过程输出测量信号,SV表示被控过程给定值,MV表示被控过程调节器(自动状态)或操作器(手动状态)输出信号。
下面阐述控制器正反作用的两个例子。在图5-3-6中,如果已知Kc>0,Kp>0,由于被控对象为负,随着被控过程输出测量信号的增加,控制器(PI调节器)输出也增加,则系统属于正作用过程,控制器应该设置为正作用才能够保证系统为负反馈,即应该使用DIR算法。如果像图中使用REV算法,则导致系统为正反馈,会导致系统发散失控。
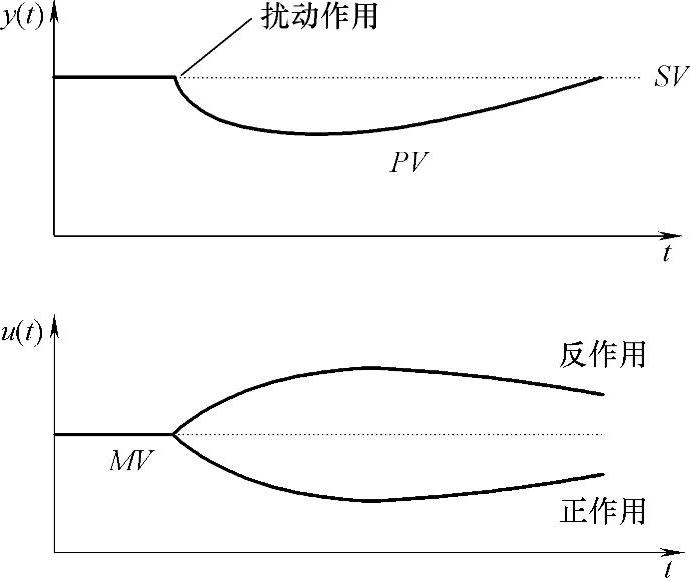
图5-3-5 “正反作用”方式曲线
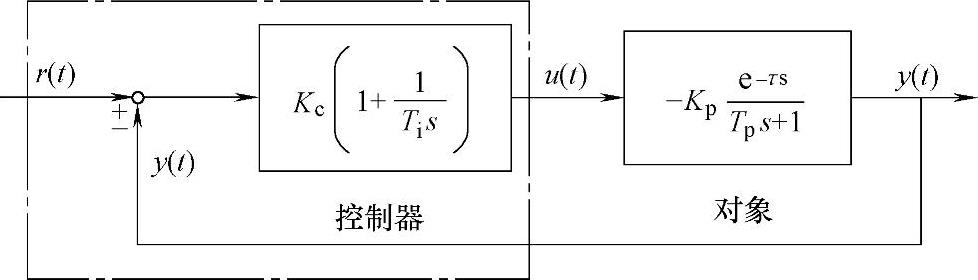
图5-3-6 正作用过程示意图
在图5-3-7中,如果已知Kc>0,Kp>0,由于被控对象为正,随着被控过程输出测量信号的增加,控制器(PI调节器)输出减小,则系统属于反作用过程,控制器应该设置为反作用才能够保证系统为负反馈。
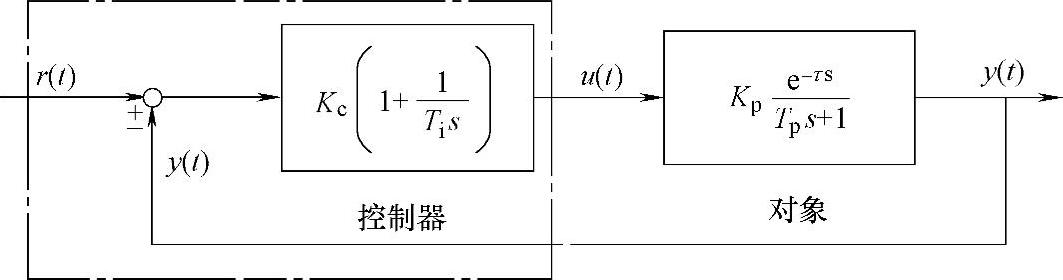
图5-3-7 反作用过程示意图
2.“正反作用”方式的选择
选择要点:决定于对象特性及调节阀结构,最终是为了使控制回路成为“负反馈”系统。具体工程上的判断方法为:(https://www.xing528.com)
1)假设检验法。先假设控制器的作用方向,再检查控制回路能否成为“负反馈”系统。
2)回路判别法。先画出控制系统的方块图,并确定回路中除控制器外的各环节的作用方向,再来确定控制器的正反作用。
以图5-3-8液位控制系统为例,在初始稳态条件下,有关系式:
r(0)=y(0)=Kpu0,Kc>0,Kp>0
则当t≥0时,实际各变量变化过程为
y(t)↑→u(t)↓
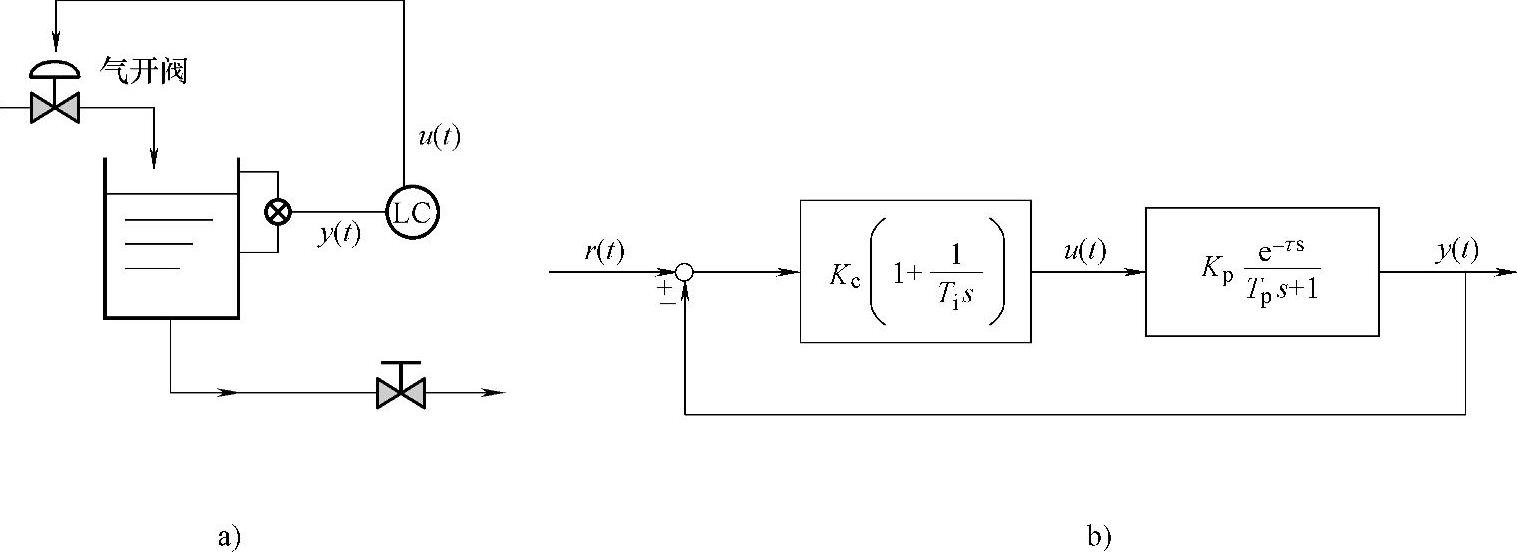
图5-3-8 液位控制系统示意图
a)液位过程流程图 b)液位控制系统框图
即该系统为反作用过程,为了使控制回路成为“负反馈”系统,控制器应该使用REV算法。图中气开阀指单作用的情况下,如果把气动执行器的气源断开,则阀门是打开状态,目的在于故障情况下能够维持安全液位。
图5-3-9进一步说明了在不同的液位控制系统中,控制器的正反作用选择原则,即保证控制系统为负反馈为最终目的。因此当图5-3-9a中液位增加或降低时,为维持液位与系统给定值的一致,控制器输出应该减少或增大,因此控制器应该设置为反作用;同样对图5-3-9b而言,当液位增加或降低时,为维持液位与系统给定值的一致,控制器输出应该增加或减少,因此控制器应该设置为正作用。
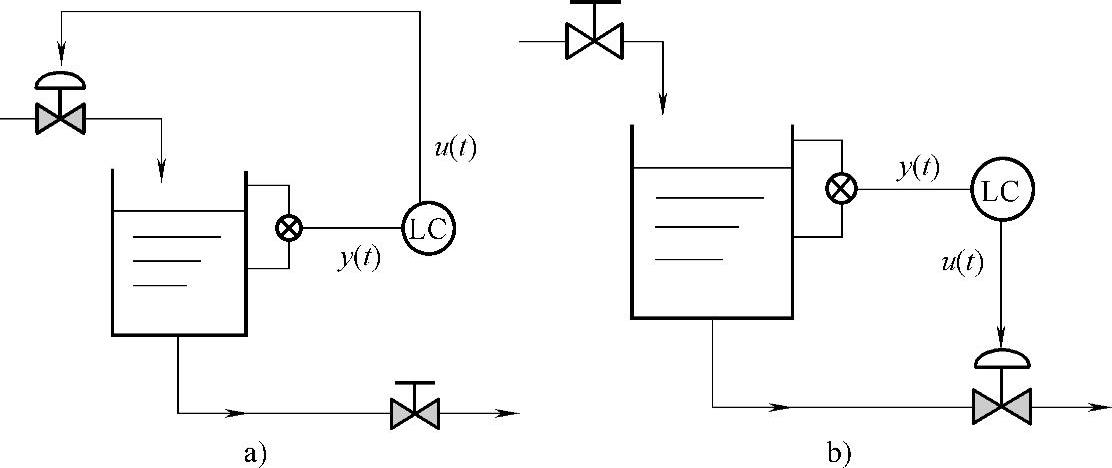
图5-3-9 控制器的正反作用选择示意图
a)控制器反作用 b)控制器正作用
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。