



PID数字调节器是利用微机的程序实现输入信号的采集、PID控制算式运算、控制量输出以及其他运算或判断功能的。PID数字调节器的主要应用程序就是PID控制程序。
PID控制程序流程如图5-3-3所示。
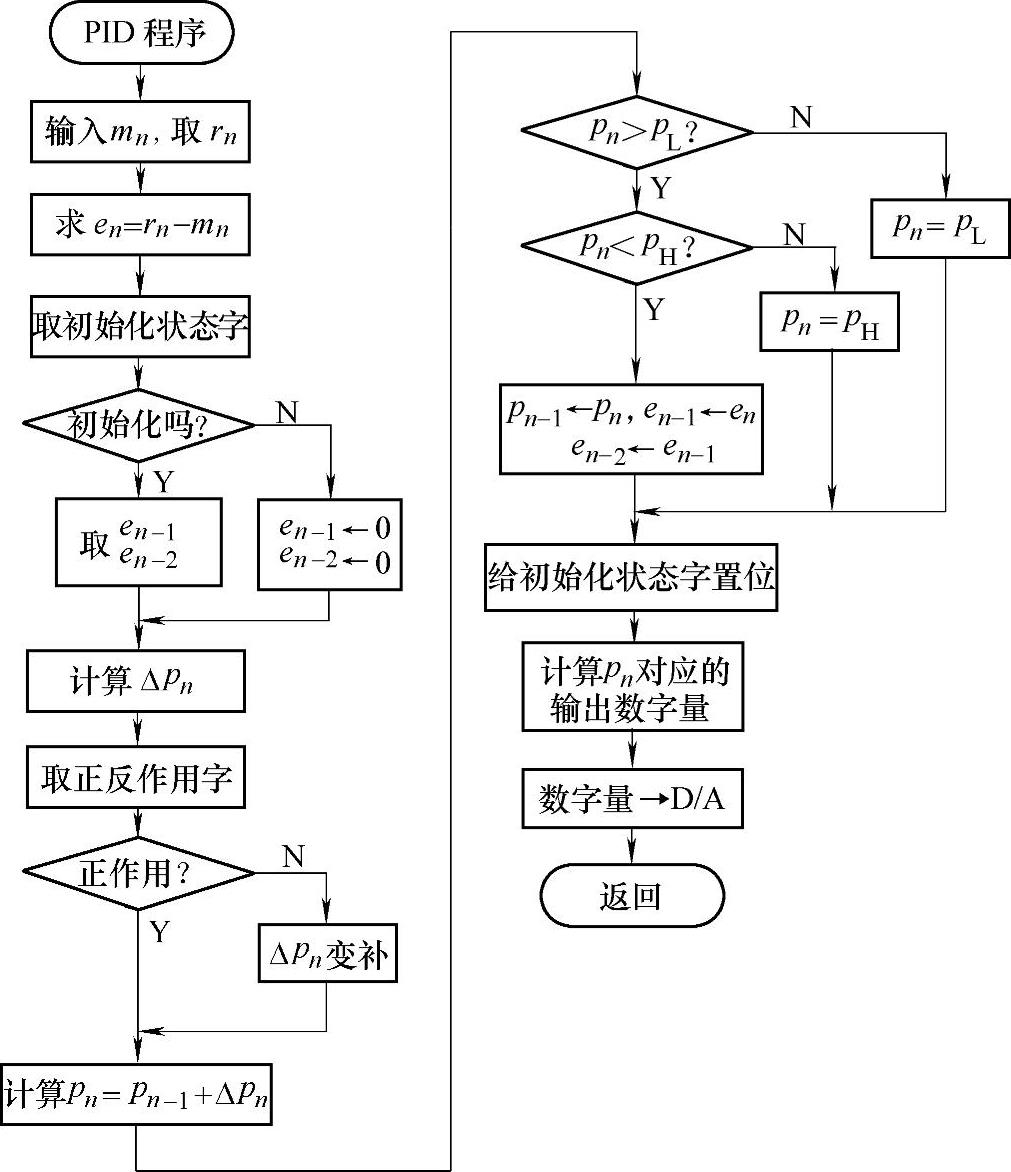
图5-3-3 PID控制程序流程图
1.PID调节器正、反作用的概念
首先明确以下一些基本概念与定义:
正偏差:调节器中,在测量值大于设定值时将偏差e定义为测量值与设定值之差(e=y-r)。
负偏差:测量值小于设定值。
“正”作用:调节器的输出随着正偏差的增加而增加。若是负偏差,情况相反。
“反”作用:调节器的输出随着正偏差的增加而减小。若是负偏差,情况相反。
作为一个通用的数字调节器,与模拟调节器一样也必须设置正/反作用切换功能。在计算机软件程序中,正、反作用是用不同的运算来实现的。
正作用时,若Δpn>0,则pn=pn-1+Δpn;
若Δpn<0,则pn=pn-1-|Δpn|。
反作用时,若Δpn>0,则pn=pn-1-Δpn;
 (https://www.xing528.com)
(https://www.xing528.com)
2.调节器的工作状态
调节器的工作状态有“自动”、“软手动”、“硬手动”及“保持”四种。
“自动”状态:测量信号与设定信号通过输入功能块进行比较计算,由比例、微分、积分算法对偏差进行PID运算,再经过电路转换为4~20mA直流电流,作为调节器的输出信号去控制执行器。
“软手动”状态:可以通过选择键使调节器处于“保持”(即它的输出保持切换前瞬间的数值)状态,或使输出电流可按快或慢两种速度线性地增加或减小,以对工艺过程进行手动控制。
“硬手动”状态:调节器的输出与手动操作器输出电压相对应,即输出值与硬手动操作器的位置一一对应。
3.参数的初始化
PID算式为一递推算式,每次运算都要用到前次运算的结果。这样,第一次运算时就需对前次结果预置初值。初值的预置有两种方法,一种是在上电后,在整个程序开始的初始化程序中对所有需初始化的变量置初值,这需在全部程序设计完后统计出所有需初始化的变量,这在相互配合设计中不大方便;另一方法是设置一初始化状态字,在整个程序开始的初始化程序中,只需对此状态字清零,而各个子程序中需初始化的变量则在该子程序中自己解决,在最后调用的一个子程序中对初始化状态字置位。这样的初始化方法便于分工编程,尤其在可编程数字调节器中,各模块的初始化更需这样处理。
4.输出限幅和抗积分饱和
积分调节的一个特点是:只要有偏差存在,输出就不断向两个极端之一变化,以致超过极限值。若采用单纯的输出限幅措施,会产生积分饱和,当输入一旦变号,输出需从深饱和区逐渐退出,造成调节滞后,使调节品质恶化,数字PID调节也有同样问题。但在数字PID调节器中,很容易实现抗积分饱和的功能,使得在输出达到限幅值时,即中断积分动作,调节器输出维持在饱和线上,保持原有的状态数据。这样就可在偏差反向时,输出立即呈现出反向积分作用。抗积分饱和系统与单纯的输出限幅系统输入/输出特性比较如图5-3-4所示。
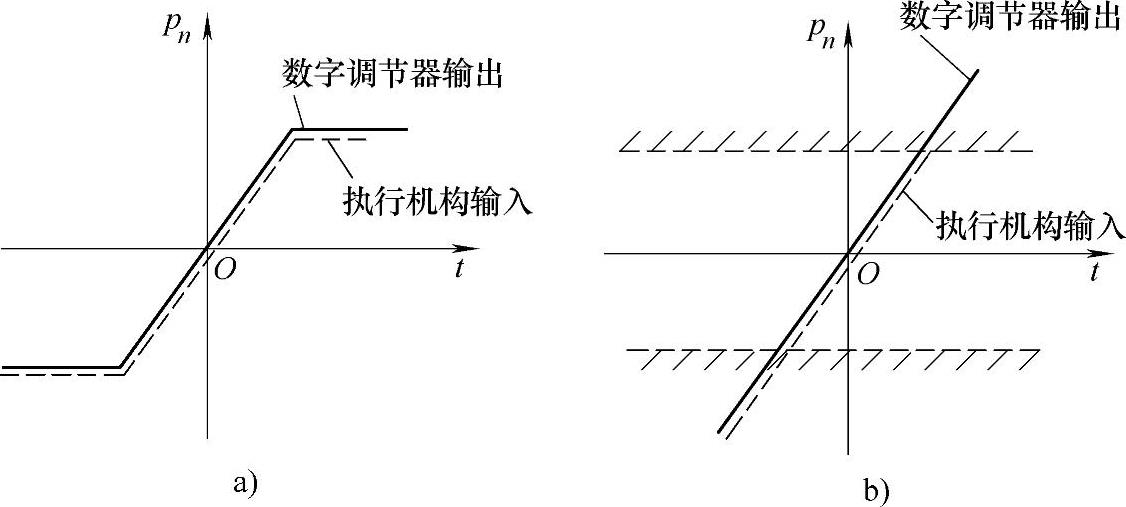
图5-3-4 抗积分饱和系统与单纯输出限幅系统特性
a)抗积分饱和系统 b)输出限幅系统
抗积分饱和措施放在输出程序中具体实现步骤为:在调节器本次输出pn未超过限幅值时,除将pn送输出通道外,并将它送到pn-1单元,en送en-1单元,即更新pn-1及en-1单元内容,为下一次运算作准备,这是正常的PID运算;当pn超过限幅值时,将限幅值送输出通道,同时pn-1单元内容不再更新,即中止积分作用,不致使调节器输出进入深饱和区。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。