



在连续生产过程中,数字控制的基本控制方式仍采用PID控制规律,因为PID控制是连续系统理论中技术成熟、应用广泛的一种控制方式。它适用于很多场合,特别是对于大多数工业对象,当不准确知道其数学模型时,可以很方便地使用PID调节器。PID参数的调整经过多年的实践已形成一套成熟的经验调试方法,并已为广大工程技术人员和操作人员所掌握。PID控制规律在计算机中也很容易实现,只要根据PID算式编制出程序,就可在计算机上执行。
1.PID控制算式的基本形式
数字调节中的PID控制算式是将PID的模拟表达式进行离散化而得到的。PID的模拟表达式为

式中 p——调节器的输出信号;
e——调节器的偏差输入信号,是测量值m与给定值r之差,e=r-m;Kp、Ti、Td——调节器的比例系数、积分时间常数、微分时间常数。
因为采样周期Ts相对于信号变化周期是很小的,这样可用矩形法计算积分,用向后差分代替微分,则式(5-3-1)中的积分项和微分项可近似表示为
式(5-3-1)便变成了离散PID算式

式中 Δt——采样周期,Δt=Ts;
pn——第n次采样时调节器的输出;
en——第n次采样的偏差值en=r-mn;
n——采样序号。
式(5-3-2)为位置式算式,其计算出的输出量与执行机构的位置相对应。
由式(5-3-2)同样可列出第(n-1)次采样的输出表达式

由式(5-3-2)减去式(5-3-3),可得PID调节器输出增量的表达式

式中 Ki——PID控制算式的积分系数, ;
;
Kd——PID控制算式的微分系数, 。
。
式(5-3-4)运算结果Δpn表示了执行机构(阀门)位置应改变的增量,为增量式算式。
式(5-3-2)和式(5-3-4)两种控制算式在本质上并无多少区别,只不过在用位置式算式时,pn=∫Δpi的任务由软件完成,而在用增量式控制算式时,则需由硬件中的输出通道来完成。两种算式在本质上是一样的,但增量式算式却有一些优点,使它的应用更广泛。这些优点主要有:
1)计算机只输出控制增量,即执行机构位置的变化部分,误动作时影响小。必要时通过逻辑判断进行保护,不会严重影响系统状态。
2)易于实现手动←→自动的无扰切换。
2.实际控制系统中PID算法的不同改进形式
为了改善控制质量,针对不同对象,PID控制中引入了许多新内容,下面予以简单说明。
(1)不完全微分形式
微分作用的引入与模拟调节时作用相同,使系统相位超前而改善控制性能。但数字控制系统中,式(5-3-2)中的理想(完全)微分作用存在以下两个问题:
1)理想微分只在偏差变化瞬时有输出信号,微分作用很弱,控制效果不好,而非理想微分作用时间较长,可加强对过程的控制。
2)当瞬时偏差变化较大时,在一个采样周期内理想微分输出数值可能很大,引起计算机数据溢出。同时,理想微分抗干扰能力很差。
为了防止抗干扰性能恶化,又使微分作用有效,可采用非理想微分的PID控制算式,其传递函数为

式中 P(s)——调节器输出量的拉氏变换;
E(s)——偏差输入信号的拉氏变换。
将上式分为两部分,即
P(s)=PPI(s)+PD(s)式中(https://www.xing528.com)

PPI(s)的差分算式与式(5-3-2)的PI部分相同,即

求PD(s)的差分算式,首先将其化为微分方程式,即
用向后差分代替微分项,则在第n次采样时,有

化简上式

所以

式中
将式(5-3-6)与式(5-3-7)合并,可得非理想微分的PID控制算式

它与理想微分的PID控制算式相比,多一项n-1次采样的微分输出量αpD,n-1。在单位阶跃偏差作用下,它们输出特性的差异如图5-3-1所示。
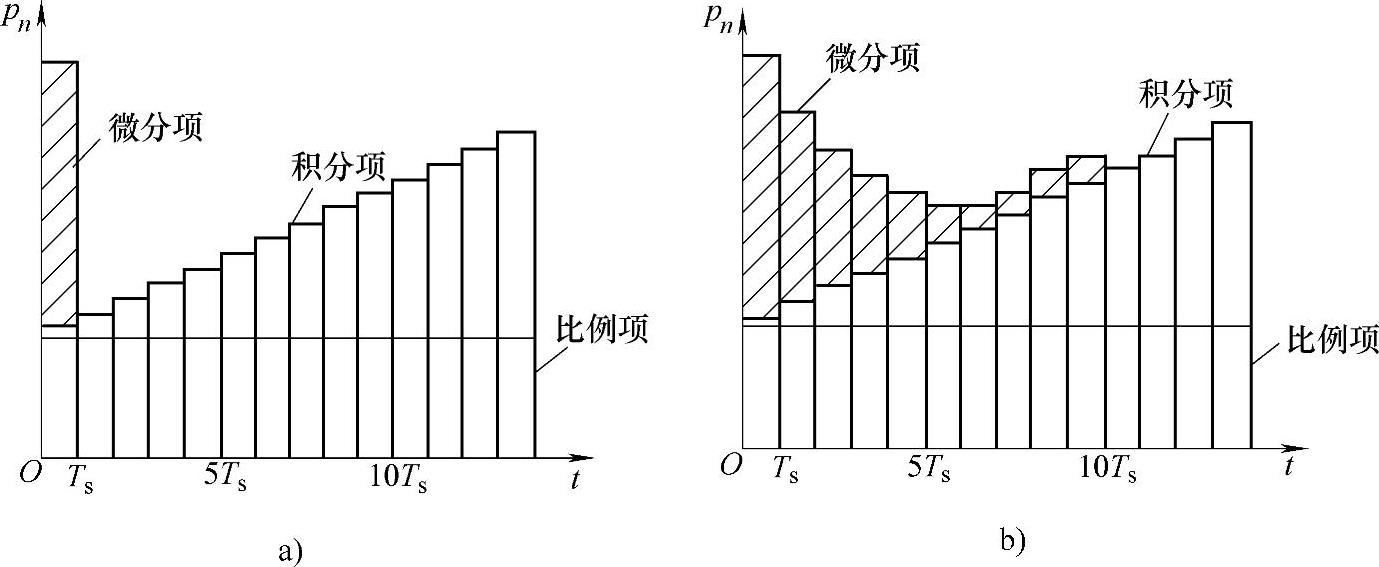
图5-3-1 PID控制算式的输出特性
a)理想微分式 b)非理想微分式
(2)微分先行PID控制模式
微分先行PID的结构如图5-3-2所示。
这是一个PD与PI的串联结构,它只对测量值M进行微分,而不是对偏差进行微分,这样在给定值R变化时,不会产生输出的大幅度变化,即可避免给定值扰动,这种算式适用于给定值R经常变化的情况。
(3)积分分离PID控制
对一般的PID控制算式,当开工、停工或大幅度提降给定值时,由于短时间内产生很大偏差,往往会出现严重的积分饱和现象,以致造成很大的超调和长时间的振荡。为了克服这一缺点,可采用积分分离算法,即在偏差大于一定值时,取消积分作用,而当偏差小于这一值时,才将积分引入。这样既可减小超调,又可达到积分校正的效果,即可以消除偏差。
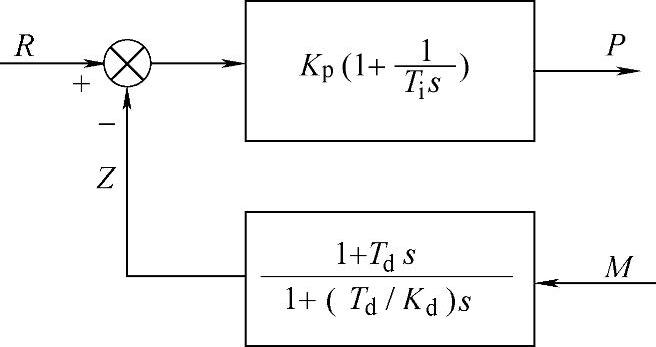
图5-3-2 微分先行PID的结构图
积分分离的PID算法为

式中

Kl称为逻辑系数,A为预定门限值,显然当e>A时,积分不起作用,只有当偏差e≤A时,积分才引入。在积分分离的PID算法中,也可用增量式算式。
(4)带有死区的PID控制
带有死区的PID算式为

当偏差绝对值|en|≤B时,本次不进行计算和输出,即本次输出Δpn=0;当偏差绝对值|en|>B时,进行PID运算,计算结果pn作为本次输出。这种控制方式适用于控制准确度要求不太高,但要求控制作用尽可能少变化的场合,如中间容器的液面控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。