



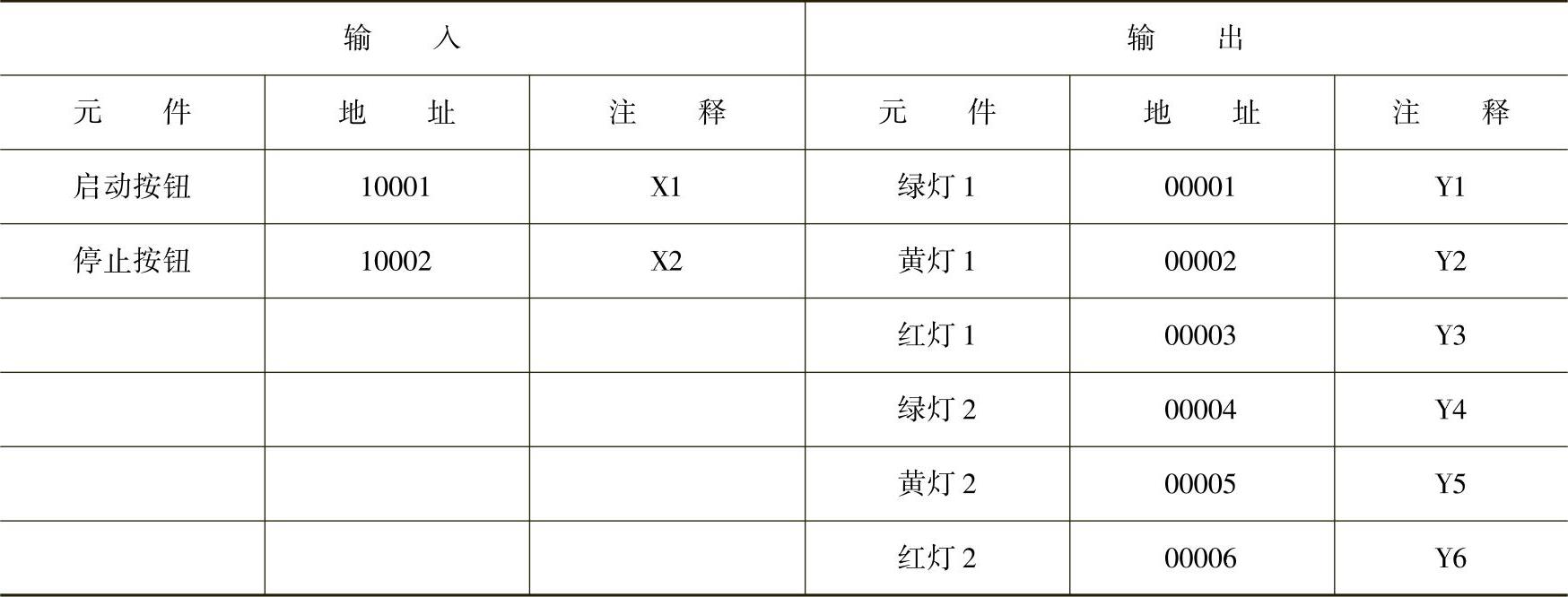
(1)PLC输入、输出分配
PLC输入、输出分配见表8-3。
表8-3 PLC输入、输出分配
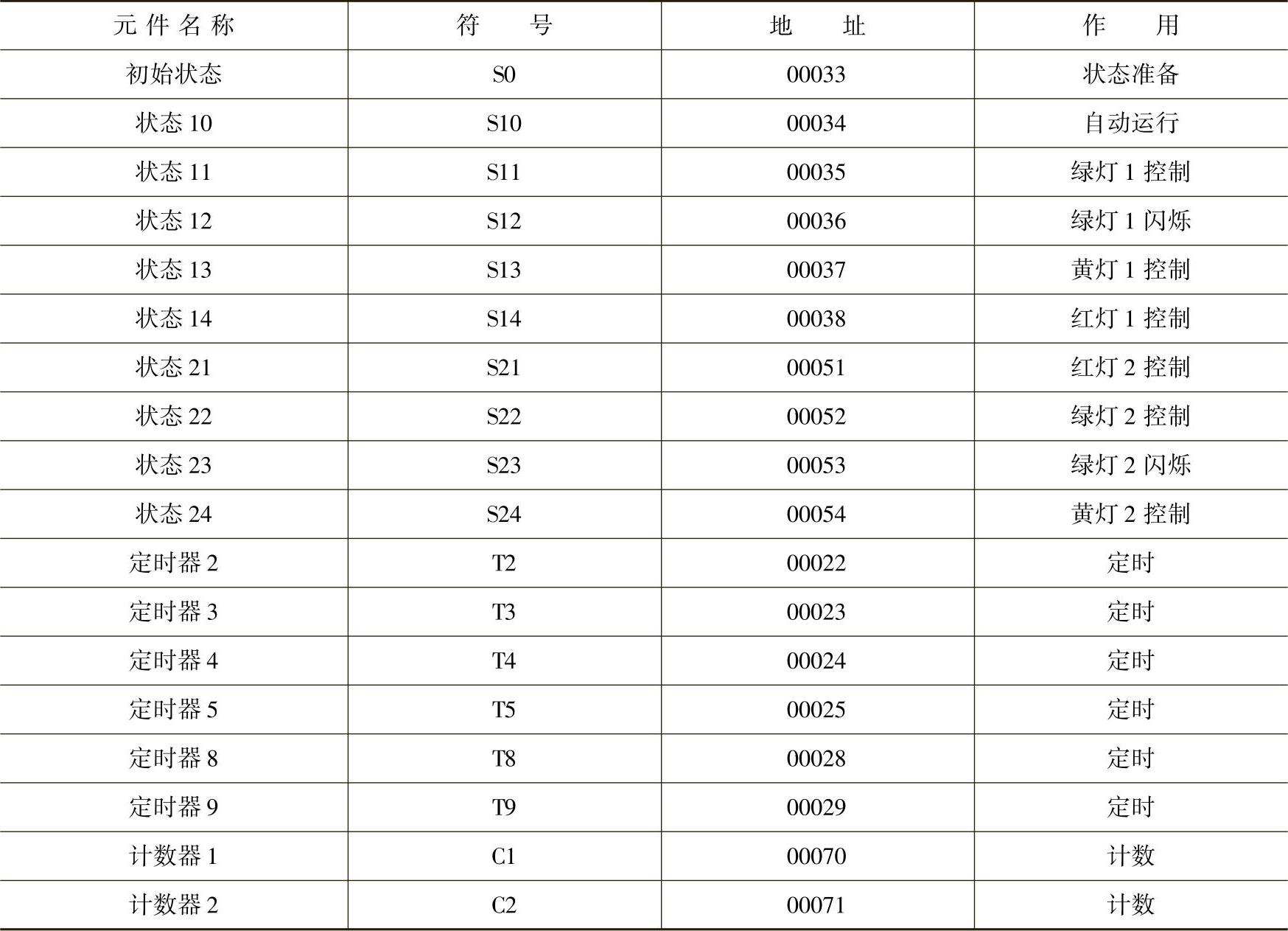
(2)配置PLC状态及其他软元件
PLC状态及其他软元件分配见表8-4。
表8-4 PLC状态及其他软元件分配
(3)根据步进、计数控制要求的交通灯状态转移图(见图8-9)
(4)设计系统初始化程序(见图8-10)
系统上电时,初始化脉冲09925驱动寄存器赋值指令MOVE给寄存器组赋值。
(5)设计状态转移控制程序(见图8-11)
应用轮鼓模拟器指令控制状态转移,每个轮鼓模拟器指令可控制16个单分支的状态转移,交通灯有两个分支,因此需要两次应用轮鼓模拟器指令分别控制两个分支状态的转移。
(6)设计各个状态控制程序
1)设计状态S10的控制程序如图8-12所示。
按下启动按钮,PLC进入状态S10,开始自动程序的运行。
进入S10状态后,并行驱动S11、S21两状态。
两个或两个以上顺序控制流程同时执行,就形成了步进顺序控制程序的并行分支程序,并行分支程序通过赋值指令同时驱动两个状态元件实现。
2)设计状态S11、S12的控制程序如图8-13所示。
进入S11状态,驱动绿灯1(Y1),定时50s,定时时间到,切换到S12状态。
进入S12状态,通过定时器T1、T2,控制绿灯Y1闪烁,闪烁次数由C1计数器记录,闪烁次数达到5次时,切换到S13状态,并复位计数器C1。
为了避免在步进顺序控制程序中出现输出双线圈,将在步进顺序控制程序中有两个以上过程要输出的输出点放到步进程序之外,通过其状态元件的触点并联驱动相关的输出元件;或者在各过程中通过驱动辅助继电器,在步进顺序控制程序外通过相关辅助继电器控制输出点。
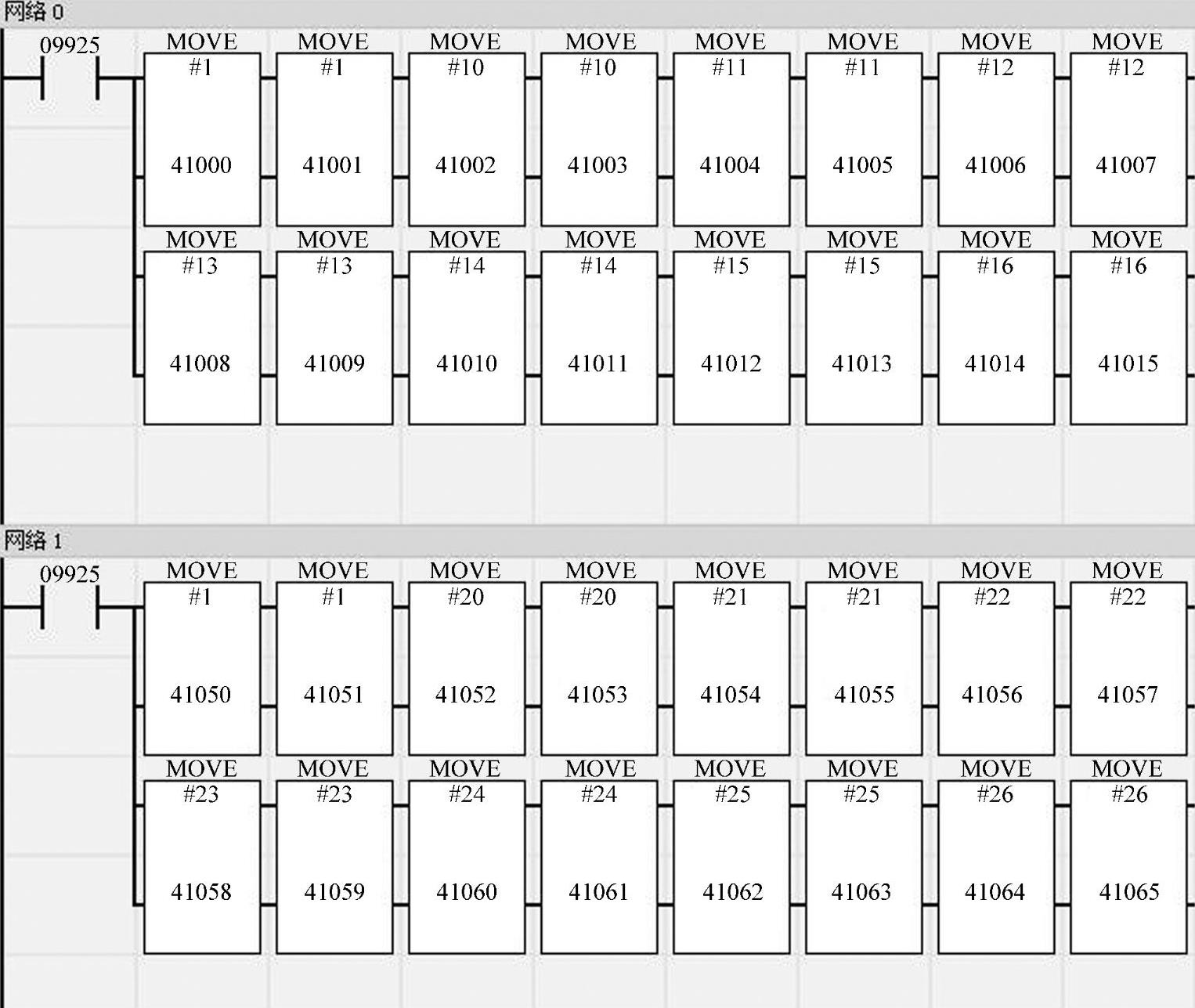
图8-10 系统初始化程序
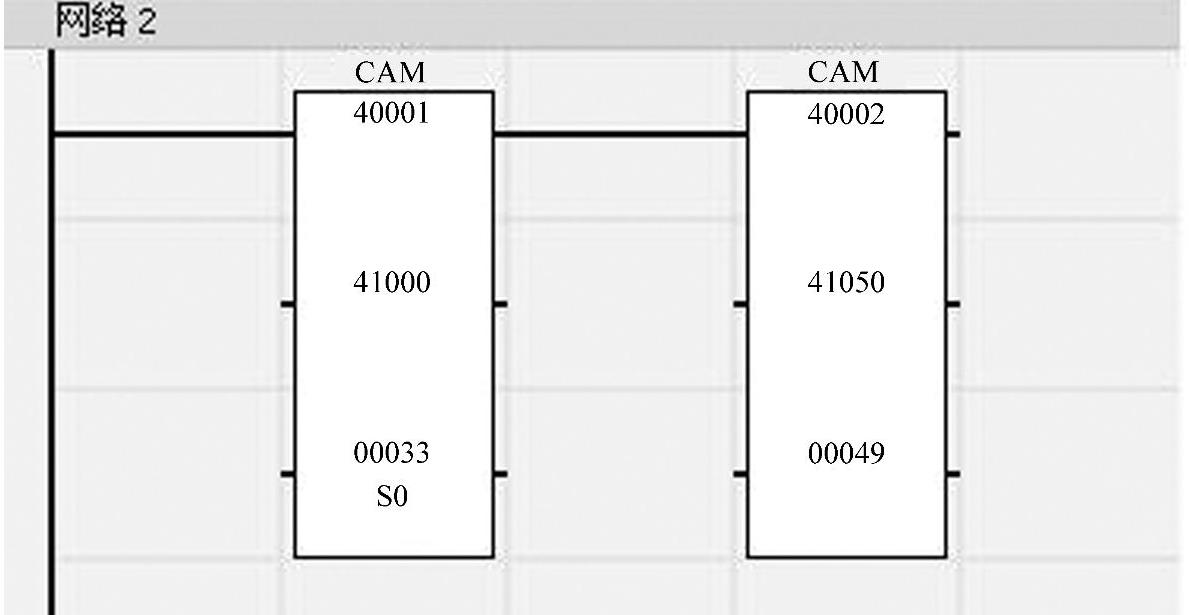
图8-11 状态转移控制
为了避免双线圈驱动,将状态S11和S12与T2并联后,再驱动绿灯1。
3)设计状态S13、S14的控制程序如图8-14所示。
进入S13状态,驱动黄灯1(Y2),定时5s,定时时间到,切换到S14状态。(https://www.xing528.com)
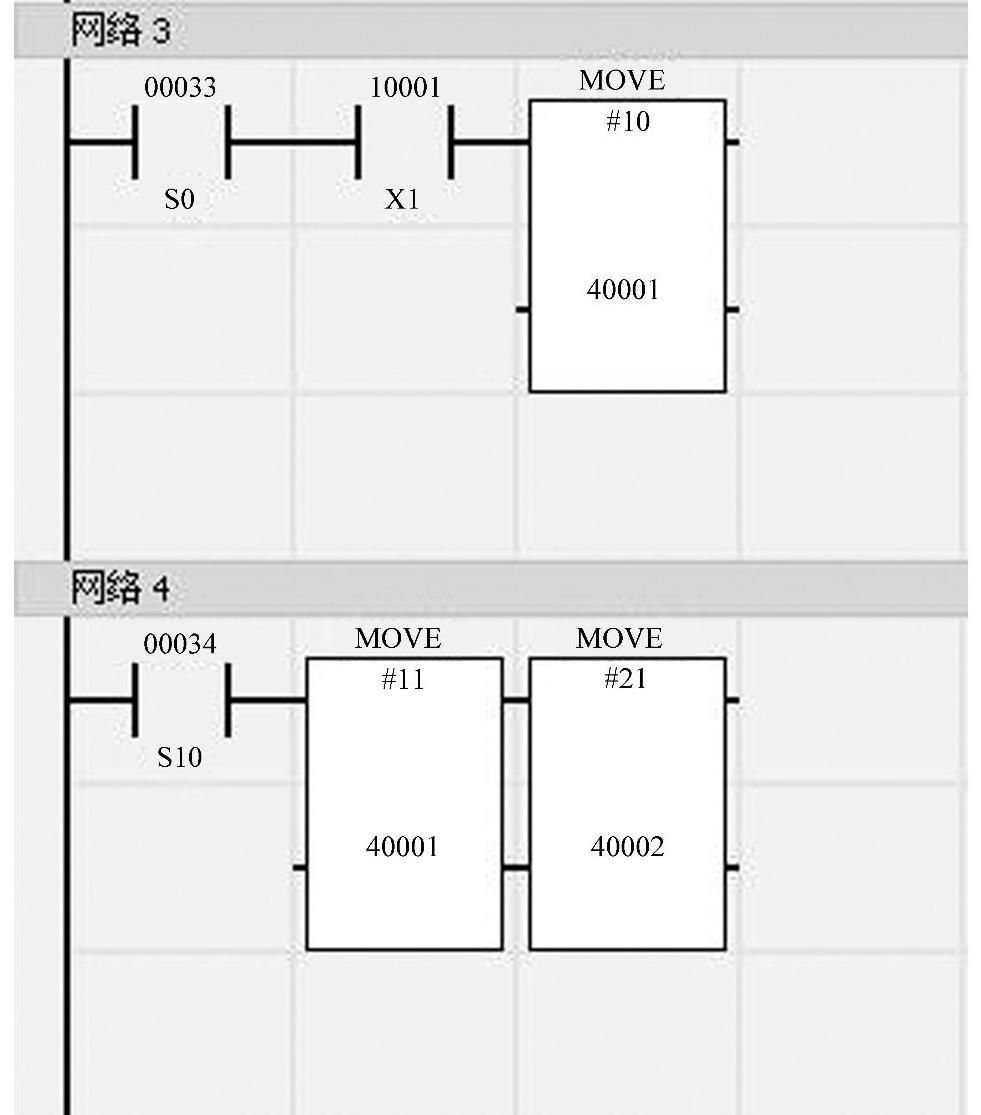
图8-12 状态S10
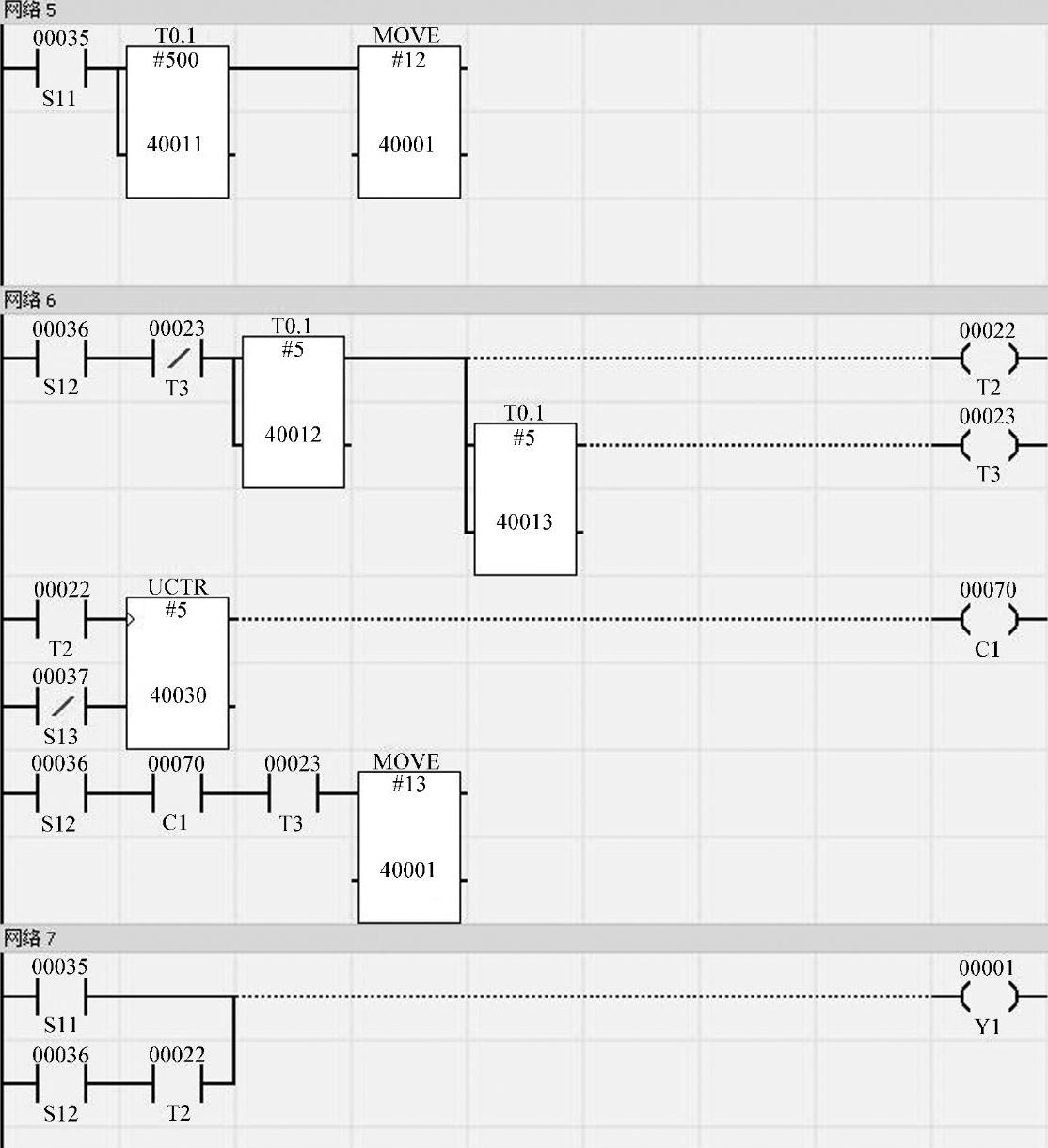
图8-13 状态S11、S12
进入S14状态,驱动红灯1(Y3),定时60s。
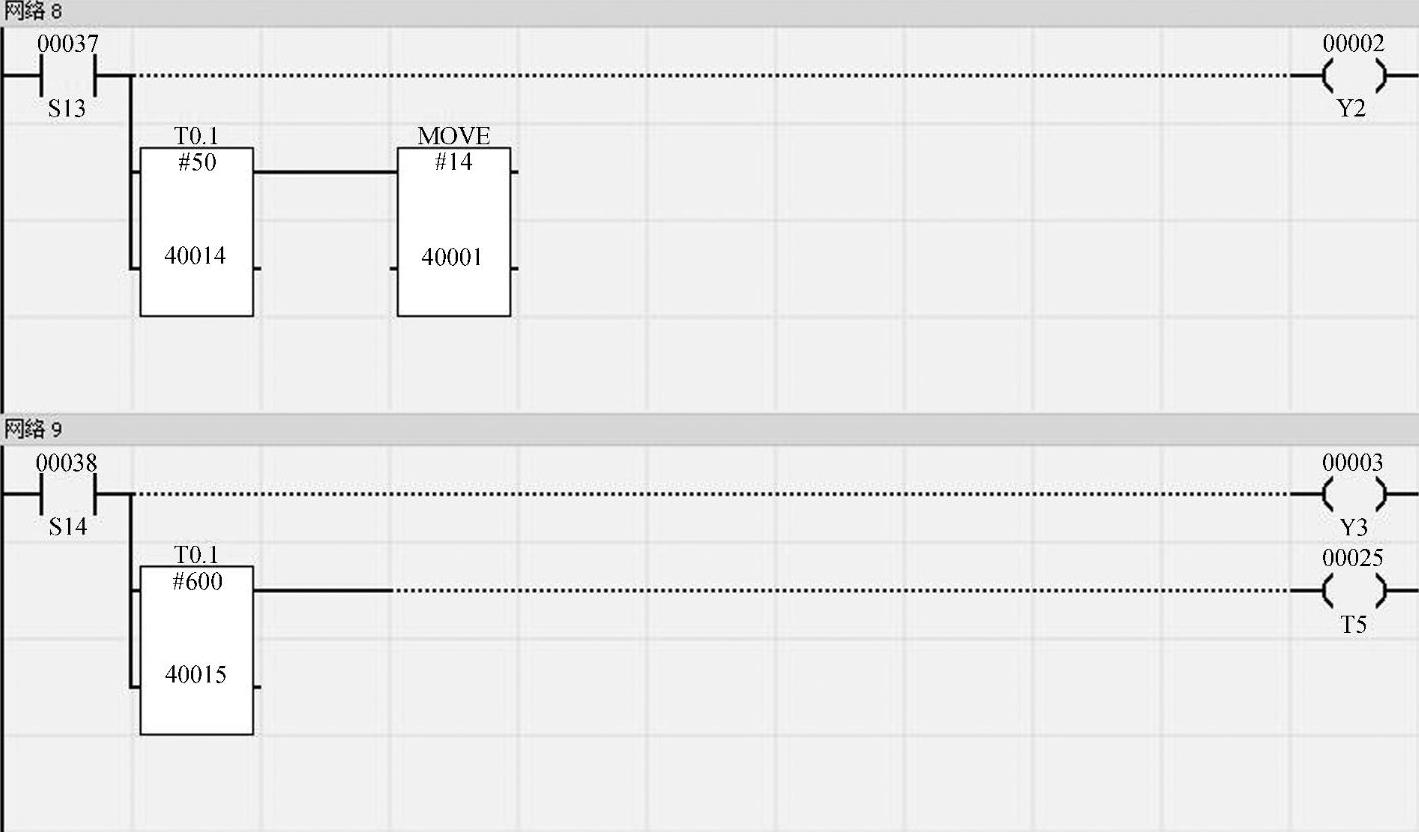
图8-14 状态S13、S14
4)设计状态S21的控制程序如图8-15所示。
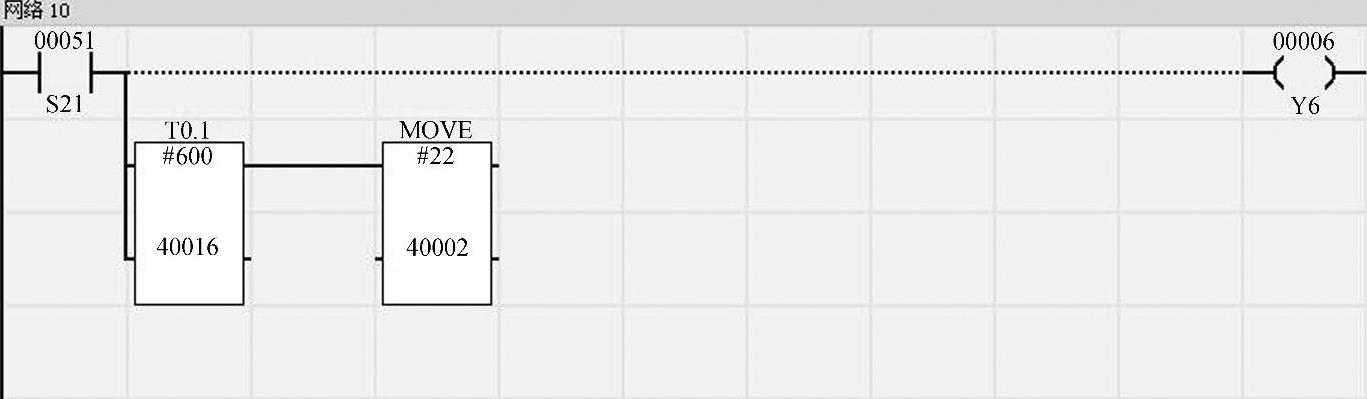
图8-15 状态S21
进入S21状态,驱动红灯2(Y6),定时60s,定时时间到,切换到S22状态。
5)设计状态S22、S23的控制程序如图8-16所示。
进入S22状态,驱动绿灯2(Y4),定时50s,定时时间到,切换到S23状态。
进入S23状态,通过定时器T8、T9,控制绿灯2闪烁,闪烁次数由C2计数器记录,闪烁次数达到5次时,切换到S24状态,并复位计数器C2。
为了避免双线圈驱动,将状态S22和S23与T8并联后,再驱动绿灯2。
6)设计状态S24的控制程序(见图8-17)
进入S24状态,驱动黄灯2(Y5)。
当状态S14、S24均为活动状态时,并行汇合,通过定时器T5切换S10状态。
V80步进程序的并行汇合要注意,在切换到S10时,注意复位S24,即通过寄存器赋值指令给40002一个初始值。
7)设计系统停止控制如图8-18所示。
按下停止按钮,系统回到状态S0,所有输出复位到零。
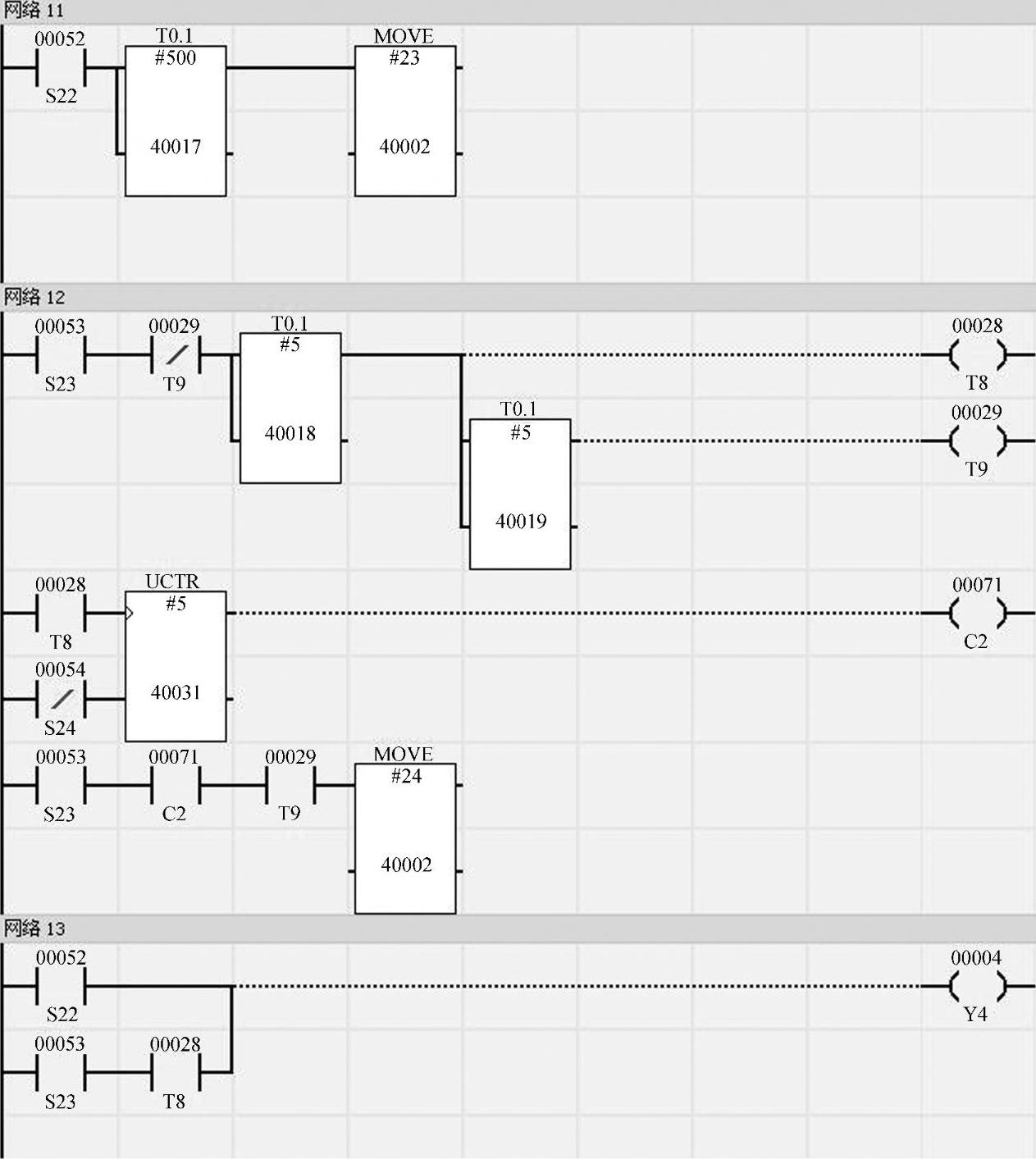
图8-16 状态S22、S23
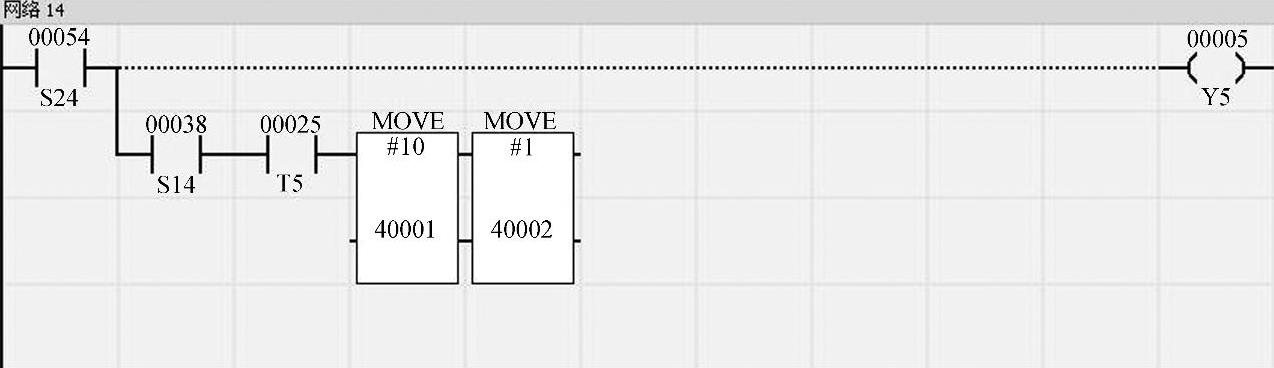
图8-17 状态S24
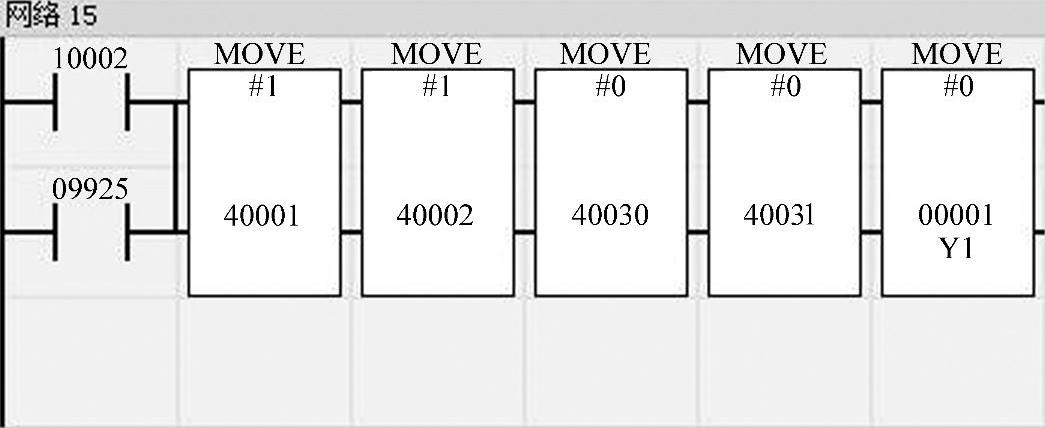
图8-18 停止控制
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。