



(1)用轮鼓模拟器CAM指令实现的状态转移控制
进入状态、状态转移使用寄存器赋值MOVE指令。
用轮鼓模拟器CAM实现的状态转移控制的三步操作是:
1)应用初始化脉冲和寄存器赋值MOVE设置状态比较表初始化数据,应用轮鼓模拟器CAM控制步进状态顺序。
2)应用输出驱动指令驱动输出。
3)转移条件满足时,应用寄存器赋值MOVE指令转移到下一步。初始化与步进控制的梯形图如图6-23所示。
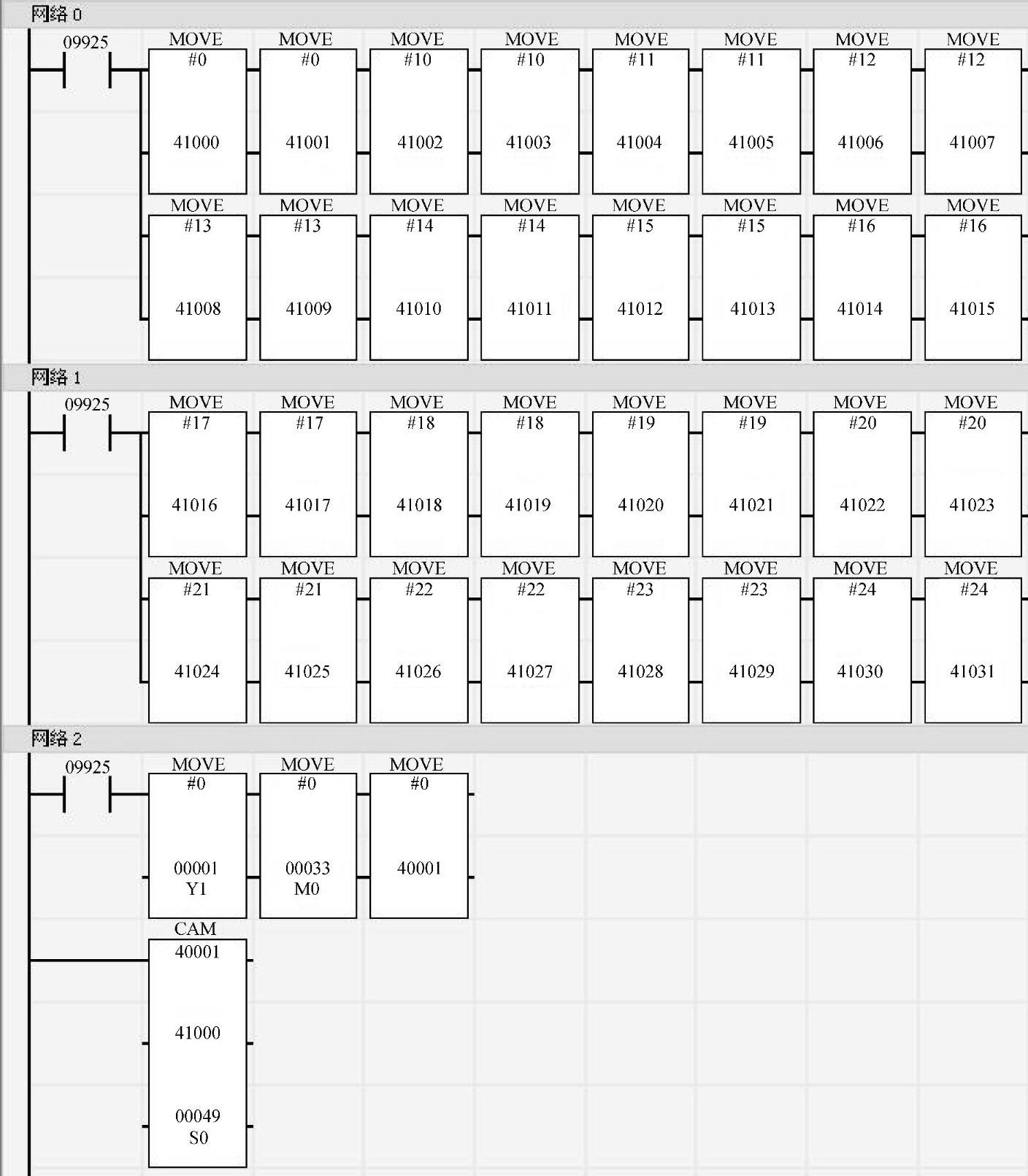
图6-23 初始化与步进控制
初始化脉冲09925到来时,应用寄存器赋值MOVE指令设置状态比较表初始化数据。为了便于状态记忆,特地将状态值直接设置于41000~41031寄存器组表格中,状态S0的数据表格对应寄存器41000、41001的值设置为0,状态S10的数据表格对应寄存器41002、41003的值设置为10,其余可以类推。
步进控制使用轮鼓模拟器CAM指令控制,轮鼓模拟器CAM指令将寄存器40001的数据与16对目的寄存器41000~41031状态表格的数据作比较,如果来源寄存器40001的值在目的寄存器对的范围内,则下节点的对应的位便会为ON,由此实现步进状态的控制。
(2)避免双线圈输出
为了避免双线圈驱动,在步进控制程序中将多个状态要驱动输出的点放到步进控制程序之外,通过状态继电器驱动步进控制程序外的输出点。如图6-24所示,在状态S10、S14状态下要驱动输出的点Y5程序,放到步进控制外,由状态继电器S10、S14并联驱动。也可以在状态S10中驱动辅助继电器A,在状态S14中驱动辅助继电器B,在步进控制外,通过辅助继电器A、B的触点并联驱动输出点Y5。
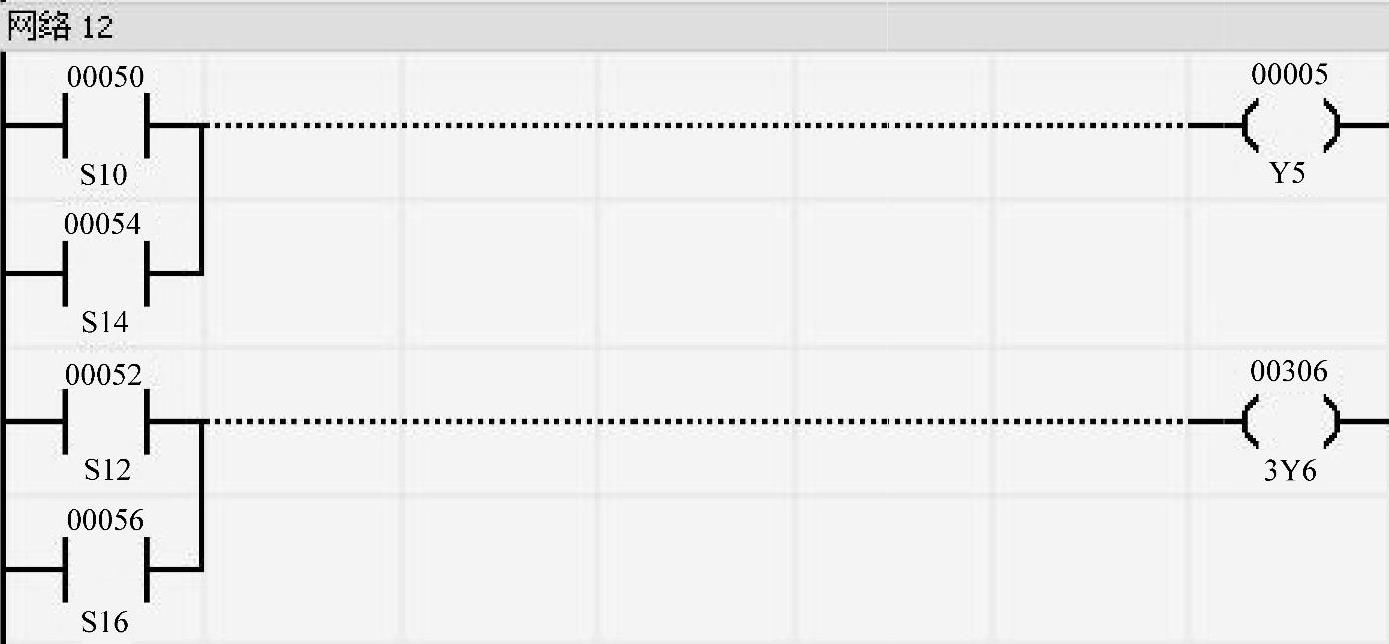
图6-24 避免双线圈输出的梯形图
(3)主控程序(见图6-25)
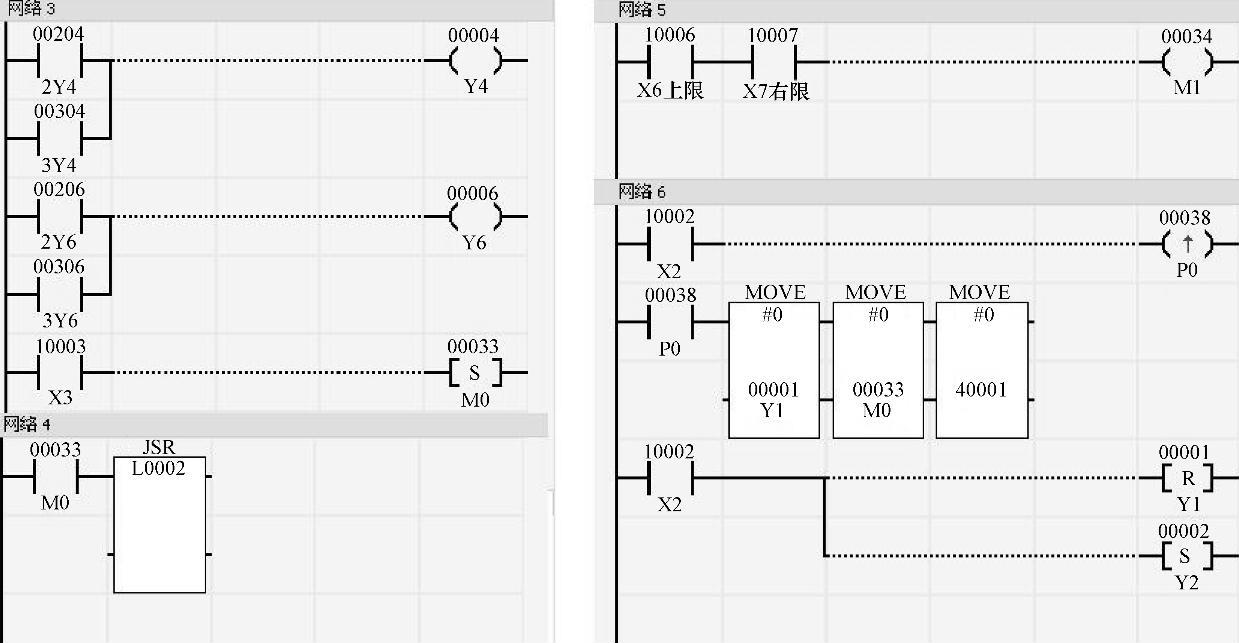
图6-25 主控程序
按下停止按钮SB2,10002为“ON”,复位所有输出继电器,复位回原点辅助继电器,回到状态S0。
按下回原点按钮SB3,10003为“ON”,调用回原点子程序,完成回原点控制。
(4)自动运行控制程序(见图6-26)(https://www.xing528.com)
在初始状态S0且系统回原点时,按下起动按钮,系统转入状态S10,驱动下移电磁阀,气缸带动机械手下移。
下移到位时,下限位开关X5动作,转入下一状态S11。
夹紧电磁阀Y7动作,延时1s,转入下一状态S12。
上移电磁阀Y6动作,气缸带动机械手上移,上移到位,上限位开关X6动作,转入下一状态S13。
左移电磁阀动作,机械手左移,左移到位,左限位开关X8动作,转入下一状态S14。
下移电磁阀Y5动作,气缸带动机械手下移,下移到位时,下限位开关X5动作,转入下一状态S15。
复位电磁阀Y7,延时1s,转入下一状态S16。
上移电磁阀Y6动作,气缸带动机械手上移,上移到位,上限位开关X6动作,转入下一状态S17。
右移电磁阀Y4动作,机械手右移,右移到位,右限位开关X7动作,根据选择开关的状态,分别转入不同的状态。
如果选择开关X4为ON,转入下一状态S0。
如果选择开关X4为OFF,转入下一状态S10。
为了避免双线圈驱动,状态S10、S14状态下要驱动输出的点Y5的程序放到步进控制外,由状态继电器S10、S14并联驱动。状态S12、S16状态下要驱动输出的点Y6的程序放到步进控制外,由状态继电器S12、S16并联驱动。
(5)回原点控制程序(见图6-27)
回原点时,先使机械手上移,再使机械手右移,回到原点。

图6-26 自动运行控制

图6-27 回原点控制程序
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。