



若将飞机液压PHM系统看作一个多阶段任务系统(PMS),则由图8-1所示的机载液压PHM系统结构可知其由机载健康监测系统、天地数据链系统和地面维护系统3个阶段组成。飞机液压PHM系统阶段结构如图8-3所示。由图8-3可见,从物理结构上看飞机液压健康管理系统各阶段的配置没有交集,但信息流上却存在紧密的时序关系、反馈关系和动态调度关系。为了有效描述以上相关关系、建立有效的总体可信性评价方法,首先需要根据各阶段系统结构组成的特点及任务目标建立起各阶段可信性评价模型。
第一阶段任务的目标是正确地采集数据,依照经典的可靠性理论,用可靠性框图法或者马尔科夫状态转移方法,研究得出数据被正确采集的概率即系统的可靠度Rj(t)。第二阶段任务的目标是将数据正确地传递到地面,除了设备的可用度这一可靠性评价之外,根据网络可靠性的理论,用经典排队论理论得出的延迟时间Tdelay也是这一阶段的可靠性评价参数。第三阶段任务的目标是维修保障活动的顺利进行,一般后勤保障系统包括了备件保障系统和维修系统,其基本的维修性评价指标有备件的保障概率和维修率(维修时间)。
3个阶段的配置系统没有交集,意味着这3个阶段子系统是完全独立的。在建立由这3个阶段构成的多阶段任务系统可靠性模型时,可以根据上节提到的状态空间的简化思想,把每个阶段看成是只有一个部件的子系统,该子系统的状态为各自用于可信性评价的状态。可将状态转移的概念加以扩展,把阶段转移看作类似故障和修复的状态转移、每个阶段看成是马尔科夫链中的状态[10],这样服从任何分布的阶段转移时间便可以以段间转移率的形式出现在马尔科夫模型中了。(https://www.xing528.com)
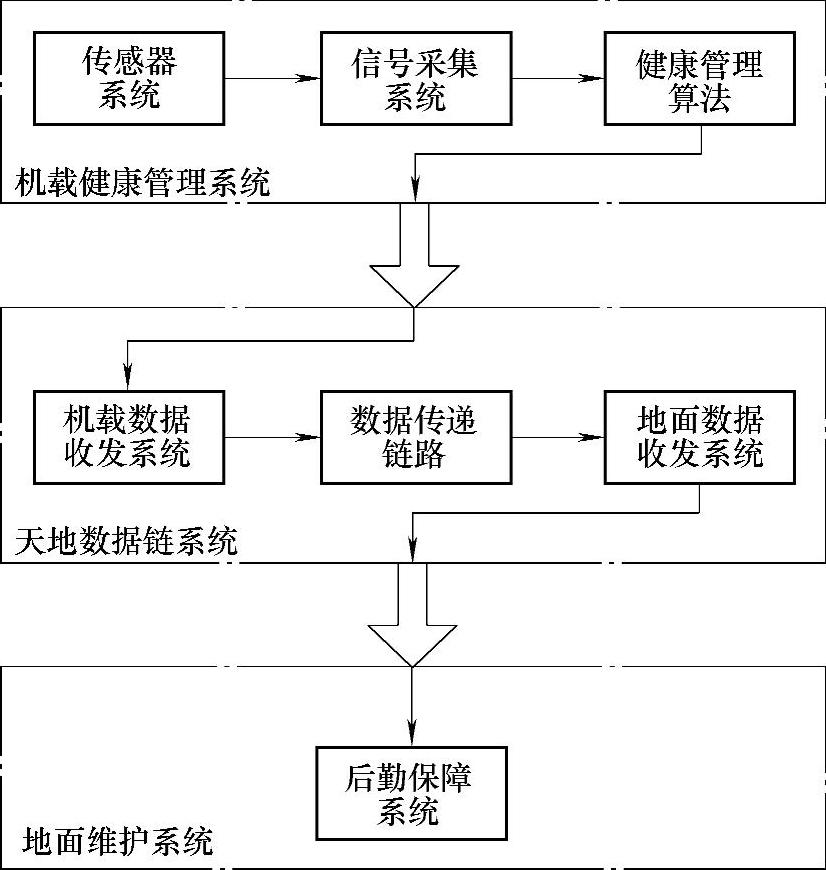
图8-3 飞机液压PHM系统阶段结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。