



(1)时间序列多尺度分解 工程问题中的时间序列一般是比较复杂的、广义平稳或者非平稳的,是许多因素共同作用的结果,不容易直接分析其变化规律,需将其分解进行逐项分析,再综合最终结果[6]。一般将时间序列y按不同性质分解为以下四个部分的组合:
y=f(t,c,s,i) (6-5)
式中,t为趋势分量,描述由于某种根本性因素影响,时间序列的中长期变化趋势;c为循环分量,描述趋势曲线在长期时间内呈现摆动的现象;s为季节分量,描述时间序列由于自然条件影响,随季节转变的周期性变动;i为不规则分量,描述随机因素引起的序列变动。
上述四个部分分量若相互独立,则为相加关系;若相互关联,则为相乘关系。以加法模型为例,数据分解的步骤如下所示:①通过移动平均得到趋势循环量(t+c),则季节变动和不规则变动之和为(s+i)=y-(t+c);②利用曲线拟合等方法求出趋势分量t,则循环分量c=(t+c)-t;③计算各周期中相同期的值的平均数,并进行调整后,作为季节分量s的值,则不规则分量i=(s+i)-s。
(2)相空间重构 在现实系统的研究中,由于某些客观条件的限制,只能观测到系统某个单一指标的时间序列。为了更有效地建立预测模型,需要深入挖掘数据信息,因此,将一维信息转换为矩阵形式,以获得数据间的关联关系,并挖掘到尽可能大的信息量,该方法称为相空间重构。
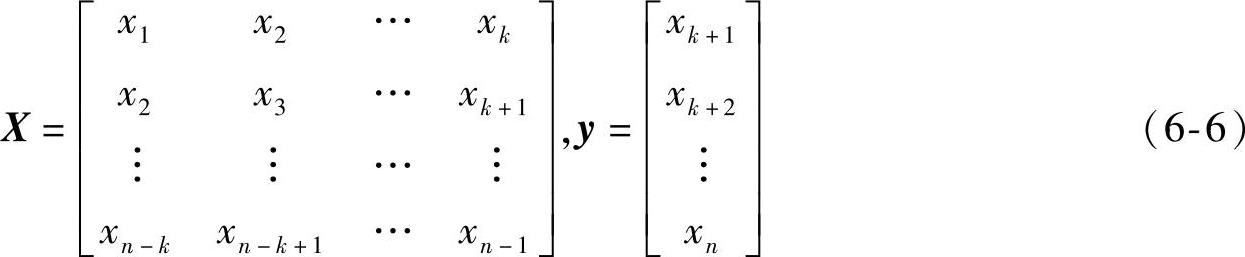
相空间重构的基本方法是通过一维的时间序列,选择适当的嵌入空间,将原始的一维时间序列转化为多维相空间。以{xp}为预测目标值,将{xp-1,xp-2,…,xp-k}作为相关量,建立滑动时间窗口xp={xp-1,xp-2,…,xp-k}和输出之间的关系yp={xp}映射关系:Rk→R,k为嵌入维数。经过变换,预测模型的输入矩阵X和输出向量y:
一般来说,嵌入维数的选取以最终预报误差(Final Predictive Error,FPE)最小为准则。FPE准则的基本思想是,用模型一步预报误差的方差来判定回归模型阶数是否适用。如果某个适用的回归模型是由某一序列拟合得来的,则利用该模型对该序列进一步预测,所得的预测误差一定是最小的。一步预报误差的方差越小,就认为模型拟合越好。

式中,xt和 分别表示实际值和预测值。
分别表示实际值和预测值。
FPE(k)随着k发生变化,因此可以找到一个最优值kopt,使得FPE(k)最小。该值即为最佳嵌入维数。在得到输入输出样本和最佳嵌入维数之后就可以进行相空间重构。得到最佳嵌入维数k后,可建立映射f∶Rk→R,满足:

(3)等维信息预测 为提高预测模型中长期预测精度,将相继得到的实验数据不断考虑进去,更新预测模型输入向量。每补充一个新信息的同时去掉一个最老的信息,这样既考虑了随着时间推移,老信息功能不断退化和新信息功能不断增强,又使系统能适应不断发展变化的实际情况。模型维数始终保持不变,因此称为等维信息预测。
等维信息1步预测以实验数据为基础,每次只预测下一数据点。提前1步预测值 为(https://www.xing528.com)
为(https://www.xing528.com)

在实际工程应用中,有的维修备件准备需要较长时间,提前1步预测不能及时地将故障征兆反馈给维修人员,因此需要提前多步预测。等维信息多步预测利用已有的实验数据和当前已经预测得到的数据,动态更新输入,保持数据集合维数不变。提前m步的预测值 为
为

(4)建立多尺度支持向量机 结合支持向量机、多尺度数据分解和相空间重构理论,将时间序列y分解成s个分量:
y=x1+x2+…+xs (6-11)
对于分解得到的x1,x2,…,xs,采用FPE准则寻找最佳嵌入维数k1,k2,…,ks,利用支持向量机建立预测模型,得到预测函数f1,f2,…,fs,则最终预测值py为

选用RBF核函数进行非线性映射:

各个分量的预测模型结构如图6-2所示。
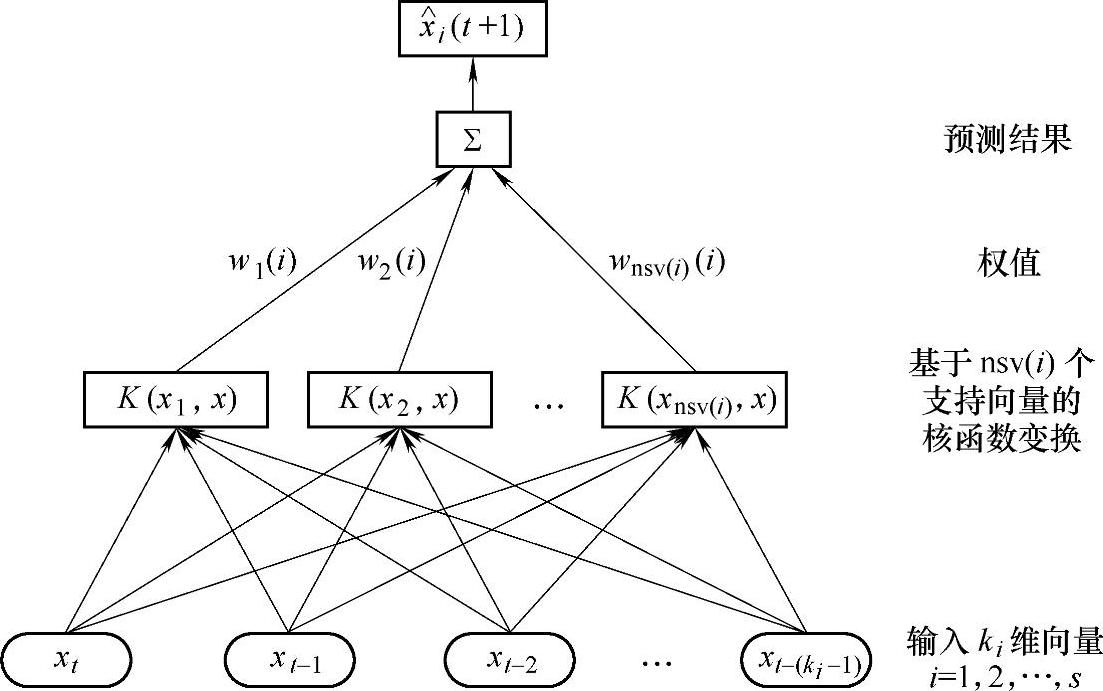
图6-2 各个分量的预测模型结构
上述预测模型中,惩罚系数c控制对超出误差的样本的惩罚程度,核函数的参数γ控制支持向量对输入量变化的敏感程度。c和γ直接影响支持向量机的预测精度。为了寻找最优的c和γ,采用网格寻优,即令c和γ在一定范围内取离散值,取使得最终训练集预测精度最高的c和γ作为最后模型的参数。在得到支持向量机最优参数后,即可以进行预测[6]。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。