



液压系统中有许多典型的闭环控制系统,如液压位置控制系统、速度控制系统、力控制系统等,这些系统是可以建立起数学模型的,因此建立正常系统的数学模型,实际系统与模型比较来实现故障诊断是可行的方法。基于模型的故障诊断技术的核心思想是估计数学模型,能反映液压系统的正常性能,然后将估计结果与实际物理系统的测量值比较而获得故障信息,如图4-24所示为基于模型的液压伺服系统故障特征提取方法[11]。从图4-24可以看出,基于模型的故障诊断方法可分为以下两个过程:残差生成器和残差评价,即利用系统数学模型进行行为预测,将预测结果与实际系统测量值比较,获得残差序列;对残差序列进行相关分析,结合历史数据实现故障诊断。
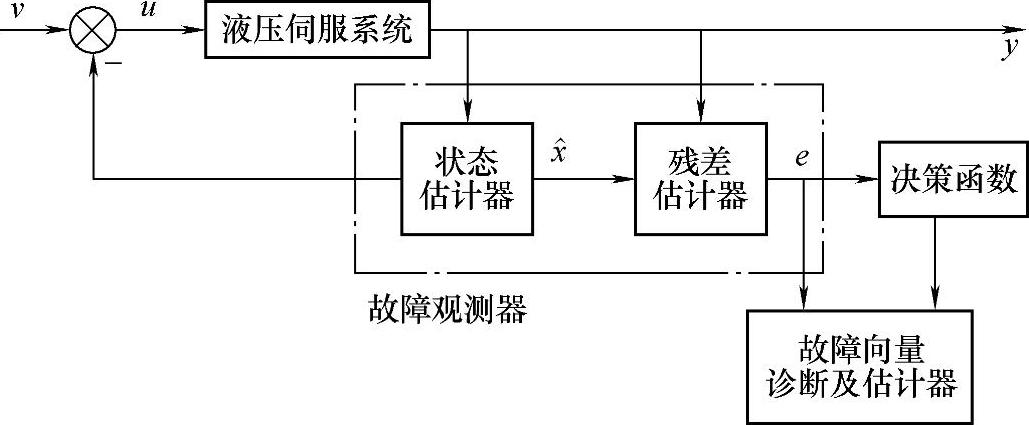
图4-24 基于模型的液压伺服系统故障特征提取方法
设液压伺服系统的动态方程为

式中,x为系统的n×1维状态向量;y为系统的m×1维输出;u为系统的r×1维输入;A为n×n维状态矩阵;B为n×r维输入矩阵;C为m×n维输出矩阵。
式(4-51)称为动态系统的状态方程和观测方程。如果系统完全可观测,那么理论上状态向量x可由输出向量y、输入向量u和这些变量导数的线性组合表示,因而可以构造观测器。
最简单的观测器是建立参数等于原系统参数的模型,这样观测器模型的动态方程可写成:

其中,希望的观测器的状态向量 与真实系统的状态向量x相同,并利用系统输出与观测器模型输出之间的差值信号经增益阵D反馈到模型输入,如图4-25所示。
与真实系统的状态向量x相同,并利用系统输出与观测器模型输出之间的差值信号经增益阵D反馈到模型输入,如图4-25所示。
故障检测滤波器是一种线性滤波器,它与全状态观测器的设置相同,但设计要求却是不同的。设计全状态观测器时,通过选择增益阵D,使矩阵(A-DC)的特征值具有负实部,这样可以保证设计的观测器是稳定的。设计故障检测滤波器时,不仅要保证滤波器的稳定性,而且要求差值信号能识别系统发生的故障,并具有强的鲁棒性。
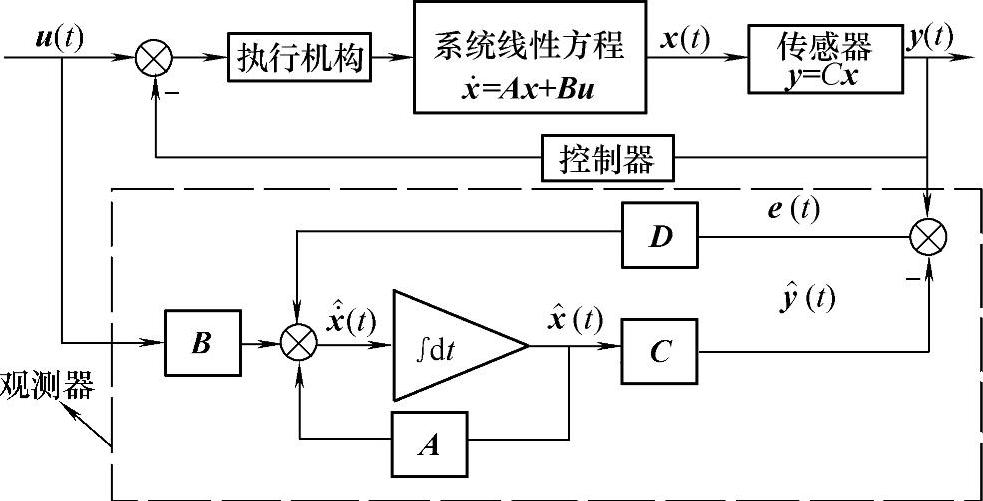
图4-25 故障观测器
若滤波器是稳定的,则正常条件下,滤波器任何初始误差均会逐渐消除,滤波器将跟踪系统的响应,输出误差e(t)将保持为零,除非考虑噪声、干扰或系统建模部分的效应。当系统中某一部件发生故障时,滤波器的模型将不能正确反映发生故障后的系统特性,输出误差将不为零。根据故障检测滤波器的设计限制,输出误差应具有方向性,某个部件的故障对应于一定方向的输入误差。
液压系统中的控制器实现增益反馈控制,及u=-Ky,则式(4-52)变为

说明增益反馈的效应可包含在A内,而将式(4-53)中的控制输入u看做是独立输入。这样故障检测滤波器方程为

定义:
状态误差
测量误差
则状态误差方程为

输出误差方程为(https://www.xing528.com)

根据状态方程误差和输出误差方程可以实现液压伺服系统故障诊断。
由于液压伺服系统在伺服阀、执行机构、管路和负载等部位具有强烈的非线性时变环节,数学模型极其复杂,现有的模型都是在各种假设和近似下得到的线性模型,因此基于数学模型的状态观测误差较大。针对复杂液压系统数学建模困难、基于数学模型故障诊断鲁棒性差的问题,常采用RBF神经网络观测器对液压伺服系统进行状态观测,通过实际系统输出与观测器输出间的误差实现伺服系统的故障诊断,RBF神经网络观测器结构原理如图4-26所示[16]。
选择RBF神经网络观测器的结构如4-26所示,RBF的第一层为输入层:网络的输入为系统控制指令r和系统的输出的角度信号θf;第二层为隐含层,具有6个节点;第三层为输出层:网络的输出为待估计的系统的输出角度 。网络参数的确定包括确定网络隐层径向基函数的中心Cj,半径σ和隐层到输出层的权值w。
。网络参数的确定包括确定网络隐层径向基函数的中心Cj,半径σ和隐层到输出层的权值w。
在RBF网络训练时采用的输入信号是系统的输入指令r和系统的输出θf作为网络的输入样本,系统的输出角度θf信号作为期望输出的样本。采集大量样本训练RBF网络以确定网络的结构参数,注意:训练网络的样本应涵盖尽量多的数据信息。
当RBF神经网络的结构参数被确定下来后,网络隐层径向基函数的中心Cj,半径σ就被确定下来且保持不变。在正常情况下,网络的输出同系统的输出差值不大,一般在零附近有波动,这是由于系统的干扰等因素造成的。当液压系统出现故障,实际系统输出与RBF网络输出的残差变大,考核该残差形式即可实现液压伺服系统的故障诊断。
如图4-27所示为RBF神经网络对正常系统的逼近曲线,为了提高逼近精度,一般选择尽量多的训练样本。试验中给定的指令信号为频率1Hz,振幅为2的正弦输入量。图4-27中包含了系统的实际输出和RBF神经网络的估计输出,由于两者的差值较小,图中的显示区分度不是很好。如图4-28所示为RBF网络对正常系统的输出跟踪情况误差试验曲线。图4-28中,曲线中的幅值为0.02,误差的精度为1%。这说明网络对正常系统能够达到较高精度的跟踪。
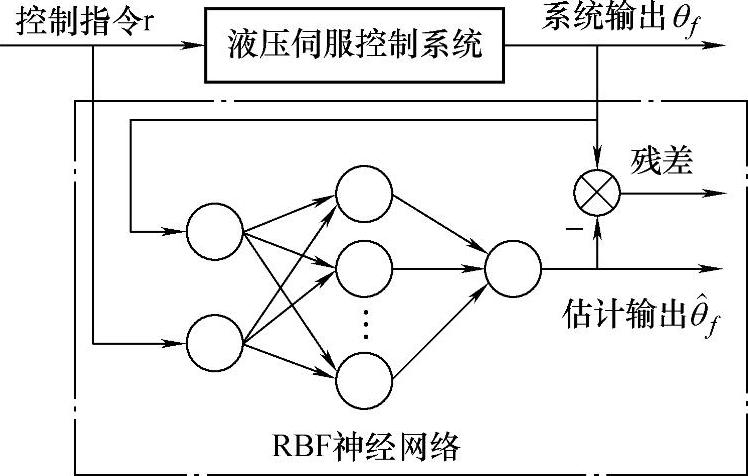
图4-26 RBF神经网络观测器结构
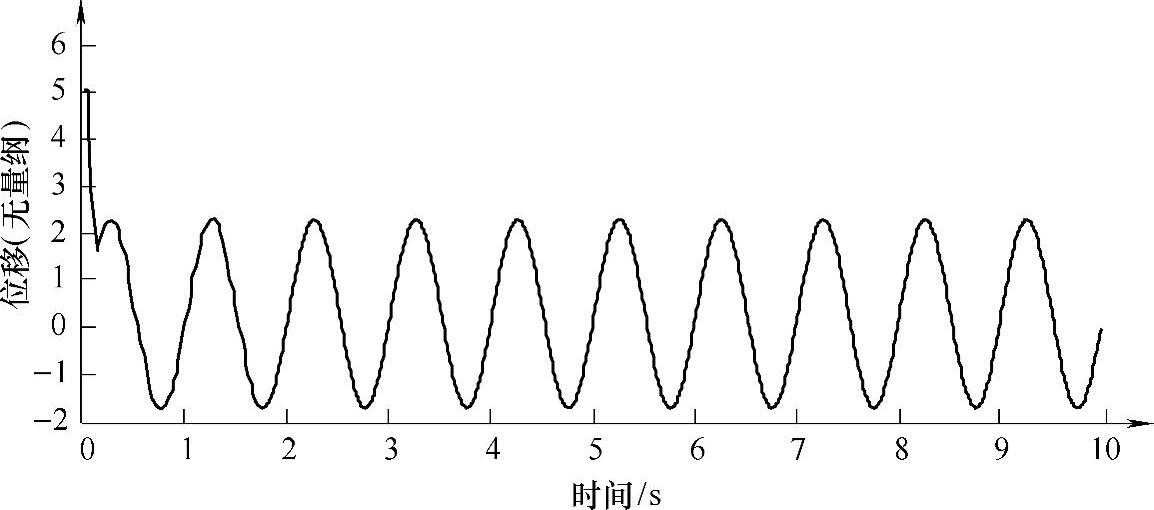
图4-27 RBF神经网络对正常系统的逼近效果
下面基于RBF神经网络进行液压伺服系统故障诊断。
(1)电子放大器故障 电子放大器故障的设置通过改变电子放大器的系数来实现。正常时ki=4×10-3,故障时k′i=8×10-3,放大系数增大了两倍。图4-29是系统的位移输出残差曲线。
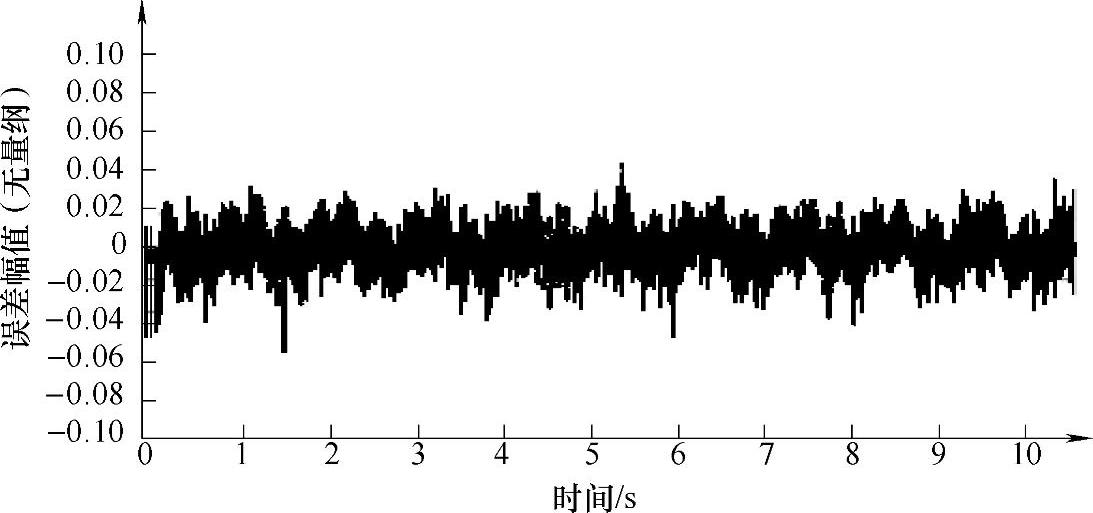
图4-28 RBF网络对正常系统的输出跟踪情况误差试验曲线
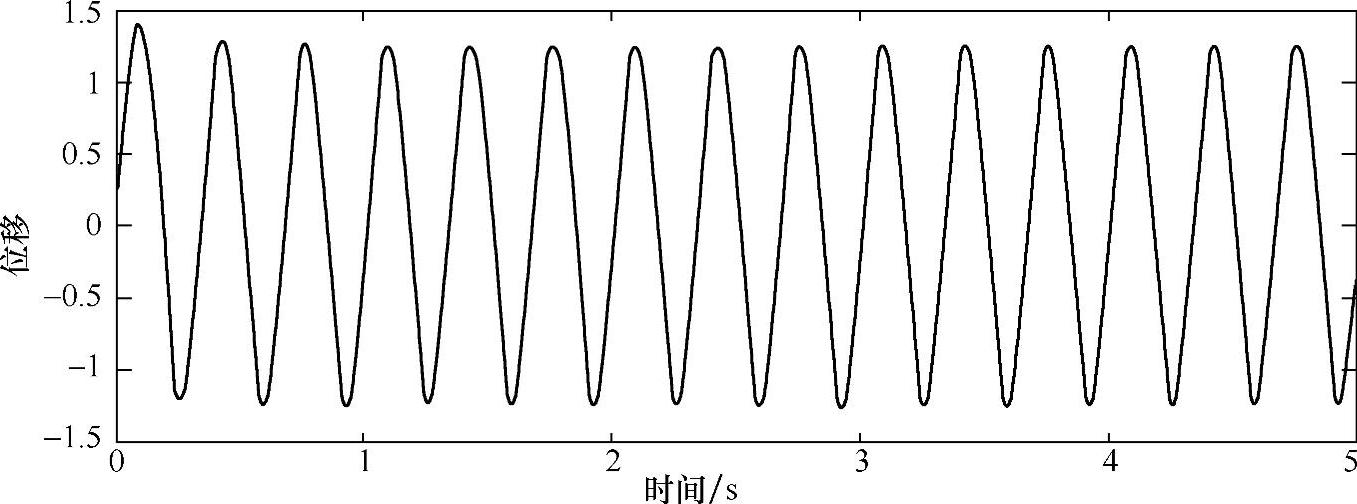
图4-29 电子放大器故障的残差曲线
由图4-29可见,当电子放大器发生故障时,系统的输出位移和网络的估计输出的位移残差不为零,残差幅值较大,残差比正常系统时的残差大8个数量级,通过检测残差曲线可以检测系统是否正常工作。
(2)泄漏故障 泄漏故障是伺服系统常见的故障之一,伺服阀滑阀磨损和液压缸的间隙都会使液压系统出现泄漏增大。为了简化系统设置,不考虑其他影响因素,仅认为泄漏故障体现为数学模型中总的流量压力系数Kce增大。正常情况下系统的流量压力系数为Kce=2.0373×10-11,这里设置其变化量为ΔKce=2.0373×10-11,通过仿真得到系统输出与RBF网络估计的残差曲线,如图4-30所示。
从图4-30可以看出,泄漏故障发生时系统的位移输出达不到指令的要求,则网络的输出和实际系统的输出残差曲线不为零,残差比正常系统时的残差大8个数量级,通过检测残差曲线可以检测系统是否出现故障。
由以上结果可以看出,RBF神经网络对系统辨识的精度很高,系统正常时网络的估计输出和实际输出残差接近于零。但是在系统出现故障时,网络的估计输出和实际的输出残差不再为零,通过检测残差曲线可以进行液压伺服系统的故障诊断。从图4-29和图4-30可以看出,虽然RBF故障观测器可以通过残差判定系统是否出现故障,但是不能实现故障定位。
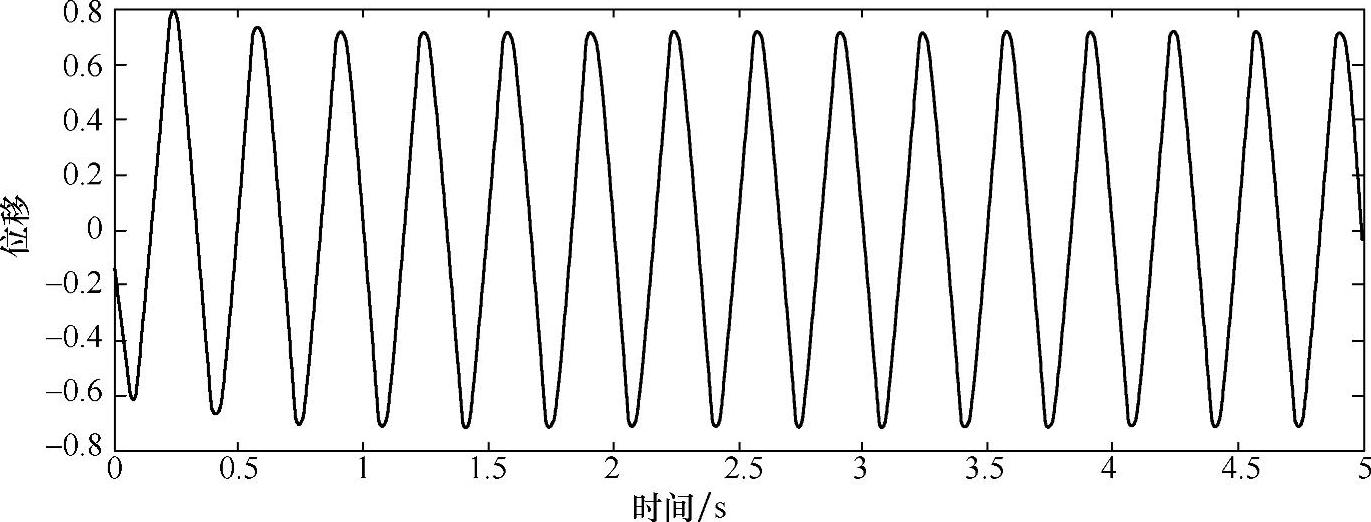
图4-30 泄漏故障的残差曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。