



软起动器设计的技术关键有:晶闸管、旁路接触器等内置设备的选取,控制电路硬件设计,控制算法设计和软件设计。软起动器是将强电弱电集成于一体的设备,其主要功能仍然由硬件完成,软件更多情况下用来承载算法,所以在设计时,主要考虑控制算法的选择、设计和仿真。
软起动器从20世纪80年代出现以来,经过长期的研究,形成了较多的控制算法。目前,控制算法的发展已经过了两代,现在正在由第三代向新的算法发展。好的软起动器控制算法只有在仿真中得到满意的结果,才能在硬件的载体上实现功能。所以说软起动器设计阶段的仿真是设计的第一步。
软起动器的仿真主要包括软起动器仿真模型的建立和软起动器仿真结果的分析。图16-51为典型分级变频起动方式仿真模型。
仿真模型图中,示波器主要用来观测软起动器、电动机一侧电压、电流,电动机转速和电动机转矩。软起动器的性能可以由这四个参数推导得出,所以得到的示波器波形可用于软起动器仿真结果的分析。
为了验证该模型的正确性和准确性,也为了在实际的软硬件设计中实现功能,需要对现有的较成熟的软起动方式进行仿真。主要是电压斜坡起动方式、电流斜坡起动方式和突跳电压斜坡起动方式。图16-52~图16-54为仿真得到的波形。
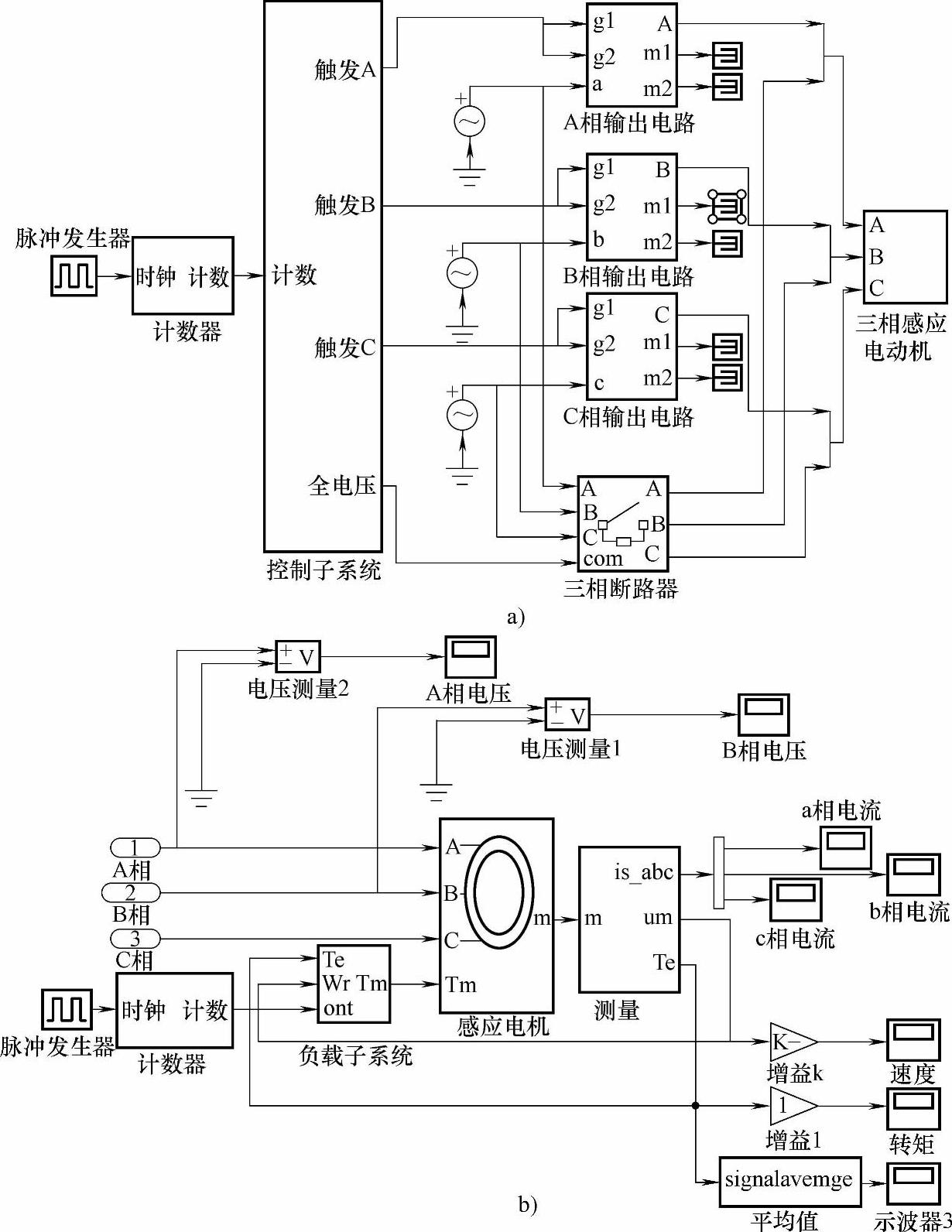
图16-51 分级变频起动方式仿真模型
a)整个系统 b)电动机及负载子系统

图16-52 电压斜坡起动仿真波形
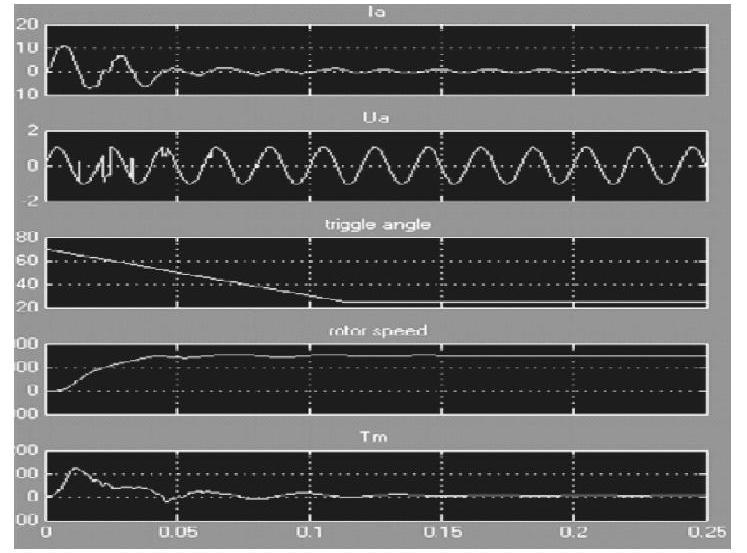
图16-53 电流斜坡起动仿真波形
 (https://www.xing528.com)
(https://www.xing528.com)
图16-54 突跳电压斜坡起动仿真波形
由前述可知,分级变频起动是利用晶闸管半控的特性依据一定的原则对进线电源电压进行控制,使电动机一侧得到的电压频率近似于对工频进行切分之后的波形。所以需要分别对不同的分级变频结果进行仿真。在此列出10分频、4分频和2分频的仿真结果,如图16-55~图16-57所示。
把各种分级变频方式按一定的规律组合,并考虑切换时的抖动,就组成了分级变频软起动方式。分级变频起动可采用16分频—13分频—10分频—7分频—4分频—3分频—2分频—工频的方式。在此给出从13分频开始的七级起动方式仿真波形,如图16-58所示。
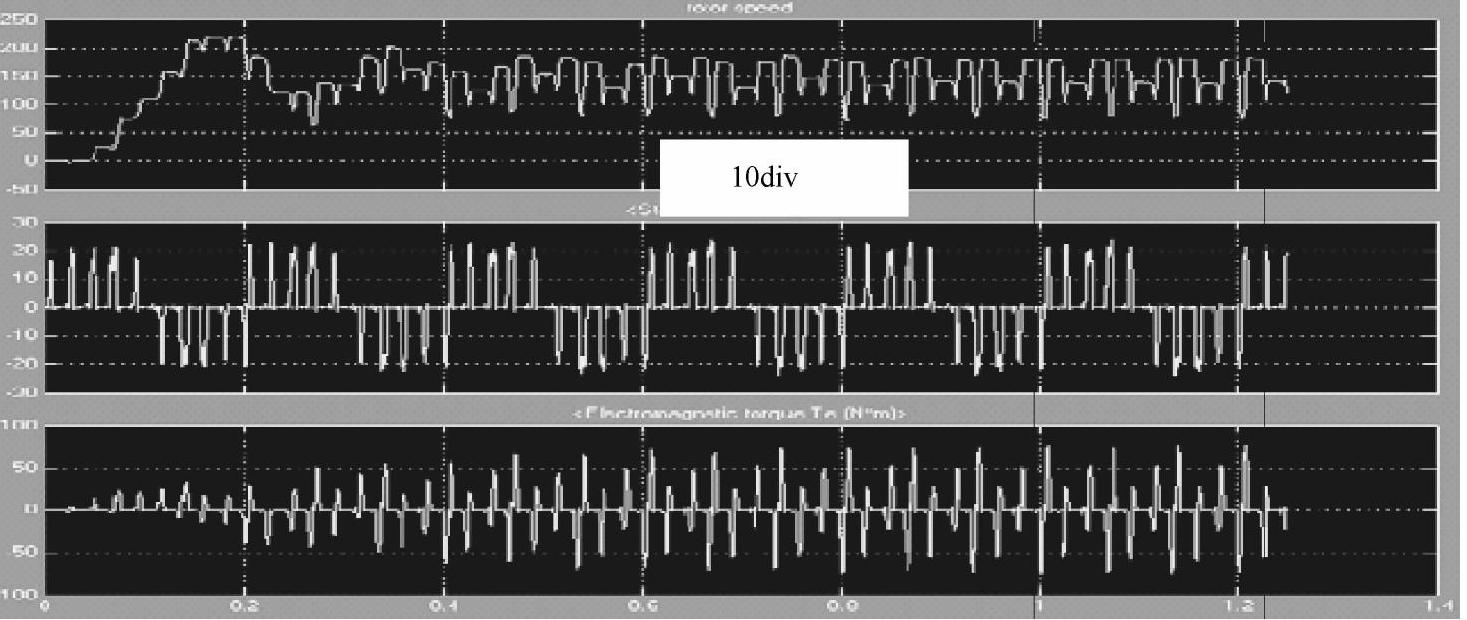
图16-55 10分频起动仿真波形
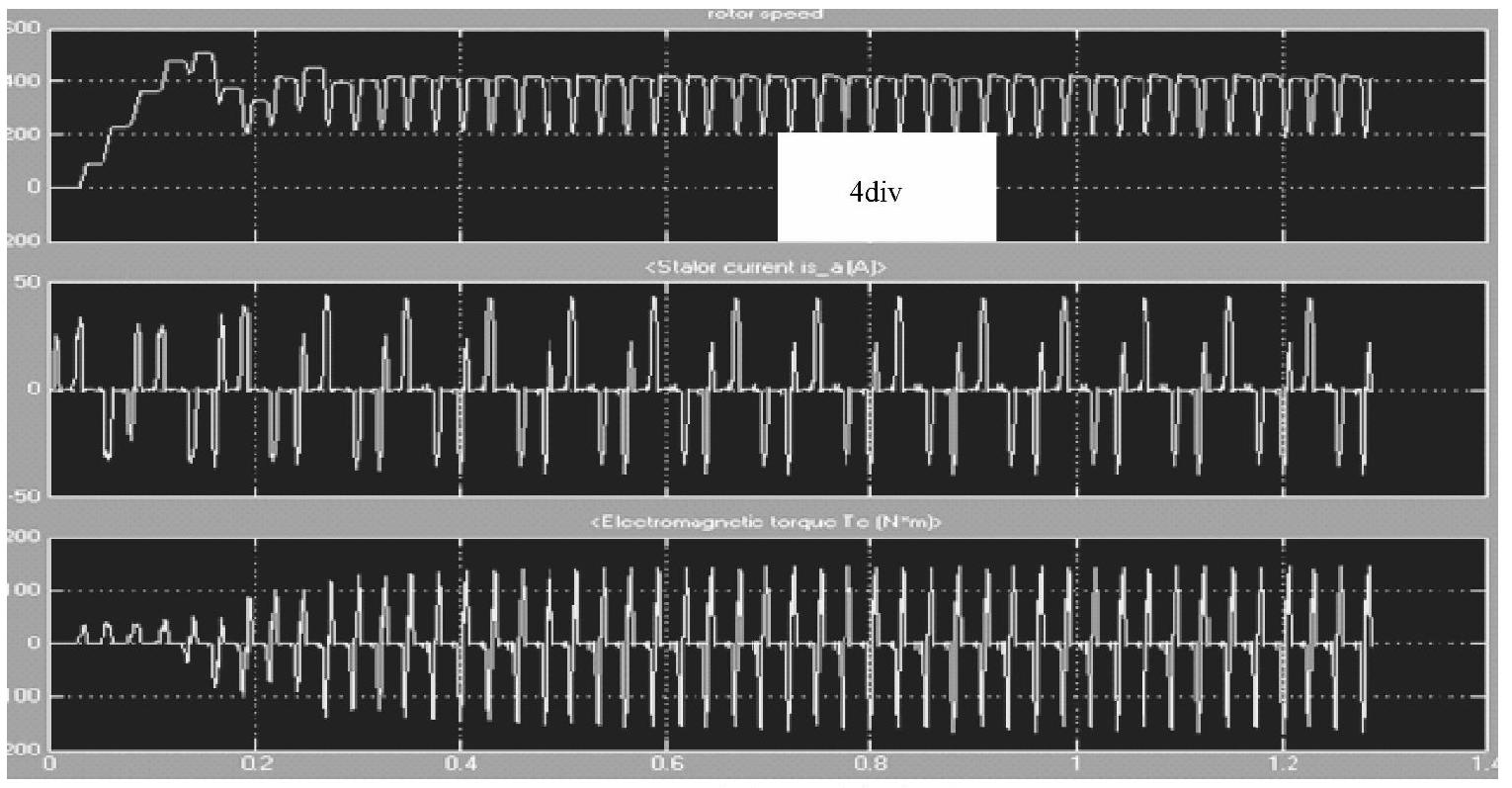
图16-56 4分频起动仿真波形
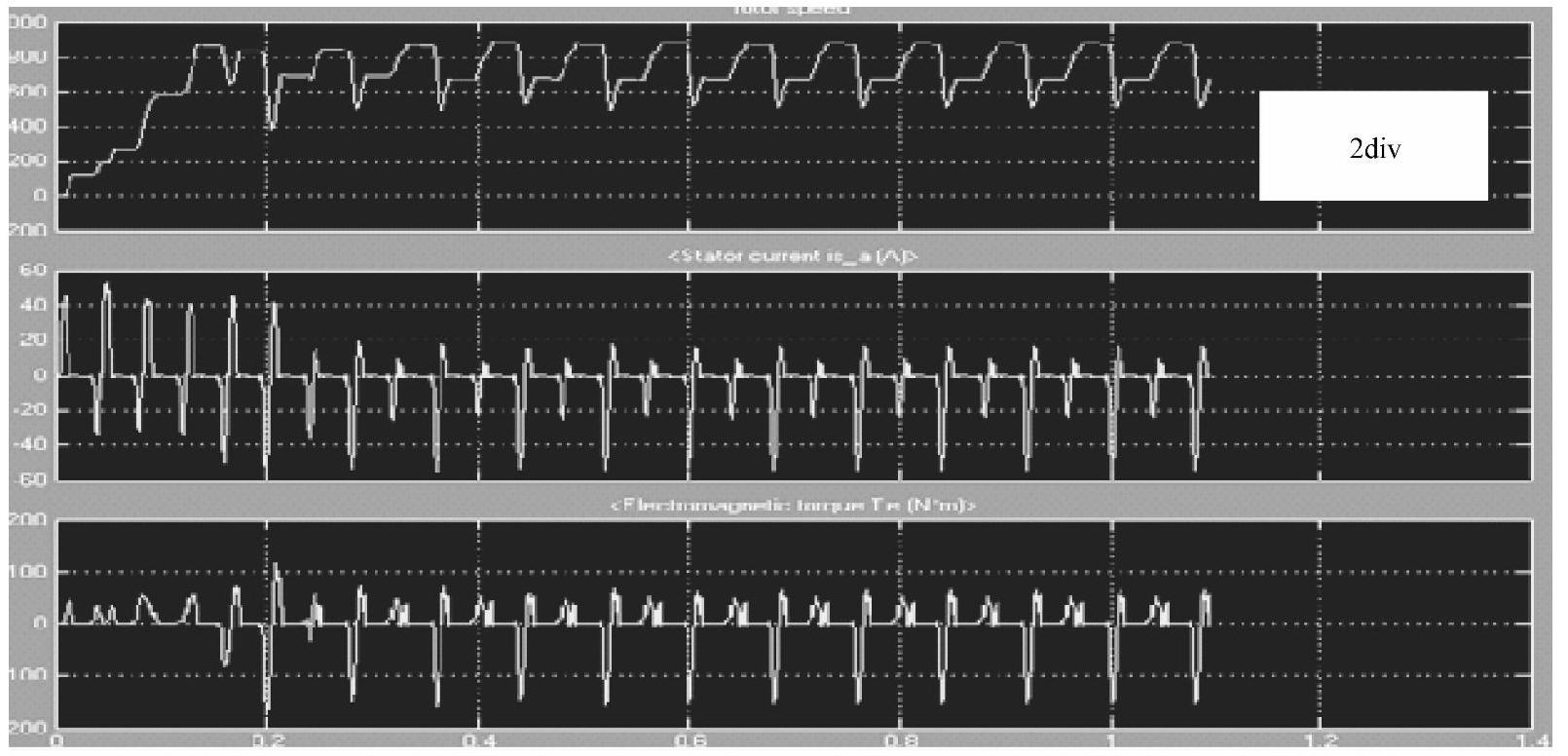
图16-57 2分频起动仿真波形

图16-58 七级分频起动方式组合仿真波形
从图中可以看出,在由2分频切入工频时波形有明显的抖动,这也是该种算法不足的地方,需要在实践中不断地分析验证。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。