



软起动器作为大型控制系统的一个关键设备,应当具有丰富的通信功能。主要的通信功能有第二代通信方式4~20mA模拟量输出通信和第三代通信方式现场总线通信。
4~20mA模拟量输出通信主要用于传递信号至远程的仪表进行显示。软起动器主控制板的主控制芯片输出信号,经过信号转换电路输出4~20mA电流。4~20mA模拟量输出电路如图16-46所示,其中RL为模拟量输出外接负载。

图16-46 4~20mA模拟量输出电路
现场总线通信方式标准众多,适用于工控领域的主要有Modbus、CAN、DeviceNet、Profibus DP等。其中Modbus协议以其结构简单、容易实现、性能优越等特点,在国内得到了广泛的应用,软起动器多采用Modbus协议进行远程通信。由于Modbus协议在物理层采用RS-485通信方式,所以软起动器硬件设计时多采用串行口RS-485通信方式设计,具体的硬件原理电路如图16-47所示。
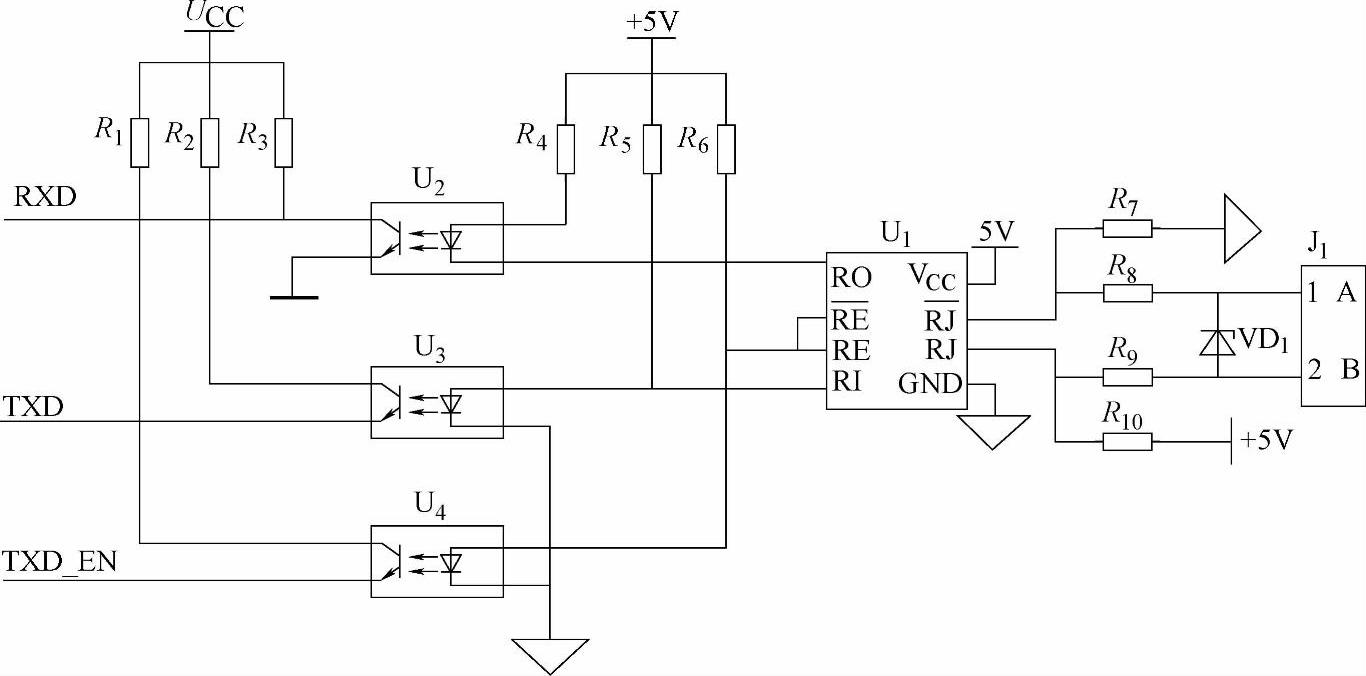
图16-47 RS-485通信原理电路(https://www.xing528.com)
在软件上应符合Modbus协议的要求,具体软件设计时的注意事项有:
1)使用RTU模式,每发一串完整的数据信息,称为一个RTU帧。每帧发送至少要以3.5个字符时间的间隔开始,在最后一个有效数据传输完成后,以一个3.5个字符时间的间隔作为该帧的结束,见表16-21。
表16-21 RTU消息帧格式

2)使用RTU模式,消息帧格式如表16-21所示,消息帧包括了CRC(循环冗余校验)值。整个消息帧中,除CRC的2字节外的所有数据均参与CRC运算。CRC值长度为2字节,消息帧内数据计算完成后,将CRC运算结果放到本消息的最后。接收设备收到消息帧后,重新计算CRC值,如与收到的校验值相同,则说明数据包传输正常,反之有误。
3)在发送的数据帧中,需要指定要访问的寄存器地址。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。