



软起动器工作环境中的不确定因素,如自然环境的影响、负载的突然变化、电源系统的故障等,都容易造成软起动器或电动机的故障。因此在软起动器中增加保护电路和保护装置是必不可少的。通常需要对软起动器进行如下的保护。
1.电动机过载保护
过载保护是电动机最重要的保护,因为它关系到电动机的安全运行,与电动机的负载情况、冷热状态、环境条件有关。
1)过载保护用来实现当电动机堵转或过载超过规定条件时,切断电源或发出报警信号,以保护电动机不受损伤。电动机过载保护装置应满足以下规定:
①运行中容易过载的电动机,以及由于起动或自起动困难而需要限制起动时间的电动机,应装设过载保护装置。
②额定功率大于3kW的电动机,应装设过载保护器;但断电导致损失比过载更大时,不宜装设过载保护器,或仅输出报警信号而不切断电源。
③短时工作或断续周期工作的电动机可不装过载保护。
④电动机运行过程中可能堵转时,应装设保护电动机堵转的过载保护。
2)过载保护通常有两种方法:
①反时限保护。过载值越大,允许工作时间越短,晶闸管允许过载值一般为2倍,过载时间超过允许时间,设备停止工作,可采用电器保护或电子保护完成。
②截流保护。当负载电流超过额定允许后,控制电路由电压闭环转为电流闭环,使输出电流维持在截流点不变。
过载保护一般采用热继电器或带长延时脱扣器的低压断路器。对大功率电动机,可采用电动机内装热元件的过载保护方式,也可采用反时限特性的过电流继电器。过载保护一般用以切断电动机电源实现保护。有些情况也采用发出告警或使电动机自动减载。
频繁起动和制动的电动机难以用热继电器实现过载保护,可用过电流继电器实现过电流保护,以防止电动机因堵转而损坏。有堵转可能的电动机,当短路保护装置不能适用其堵转要求时,应装设定时限过电流保护,其时限应保证电动机起动时保护装置不动作。
当采用长延时脱扣器的低压断路器做过载保护时,脱扣器的整定电流计算公式为IDZ=Kk2IN,其中IDZ为低压断路器长延时脱扣器整定电流;IN为电动机额定电流;Kk2为可靠系数,一般取1.1。
IEC 60947标准规定,电动机过载等级分为10A级、10级、20级、30级共四级过载保护曲线,分别是在通以1~8倍电动机额定电流延时跳闸曲线,如图16-39所示。
2.三相电流不平衡保护
当交流电动机三相绕组中通以三相正序电流时,各相磁动势分解出的3个反向旋转的磁动势将互相抵消,使合成磁动势成为一个正向旋转的磁动势,反之则为一个反向旋转的磁动势。若在电动机中通入不对称电流,则正序和负序电流将同时存在。
由于感应电动势的负序阻抗小,所以较小的负序电压就可以引起相当大的负序电流,造成电动机发热,且使合成电磁转矩减小。因此不允许电动机长期运行在不对称电压下。
软起动器对电流不平衡的处理采取两种方式:一种是对输出进行保护性分断;另一种是通过三相电流反馈来调节各晶闸管触发延迟角使三相电流接近平衡。
美国国标规定,电流不平衡保护的值可选择在10%~40%,电流不平衡百分比是相电流Iph与平均电流Iav之间的差值,不平衡百分比=(Iav-Iph)/Iav×100%。当电流不平衡超过规定值,保护动作延时可选择在0.1~90s。
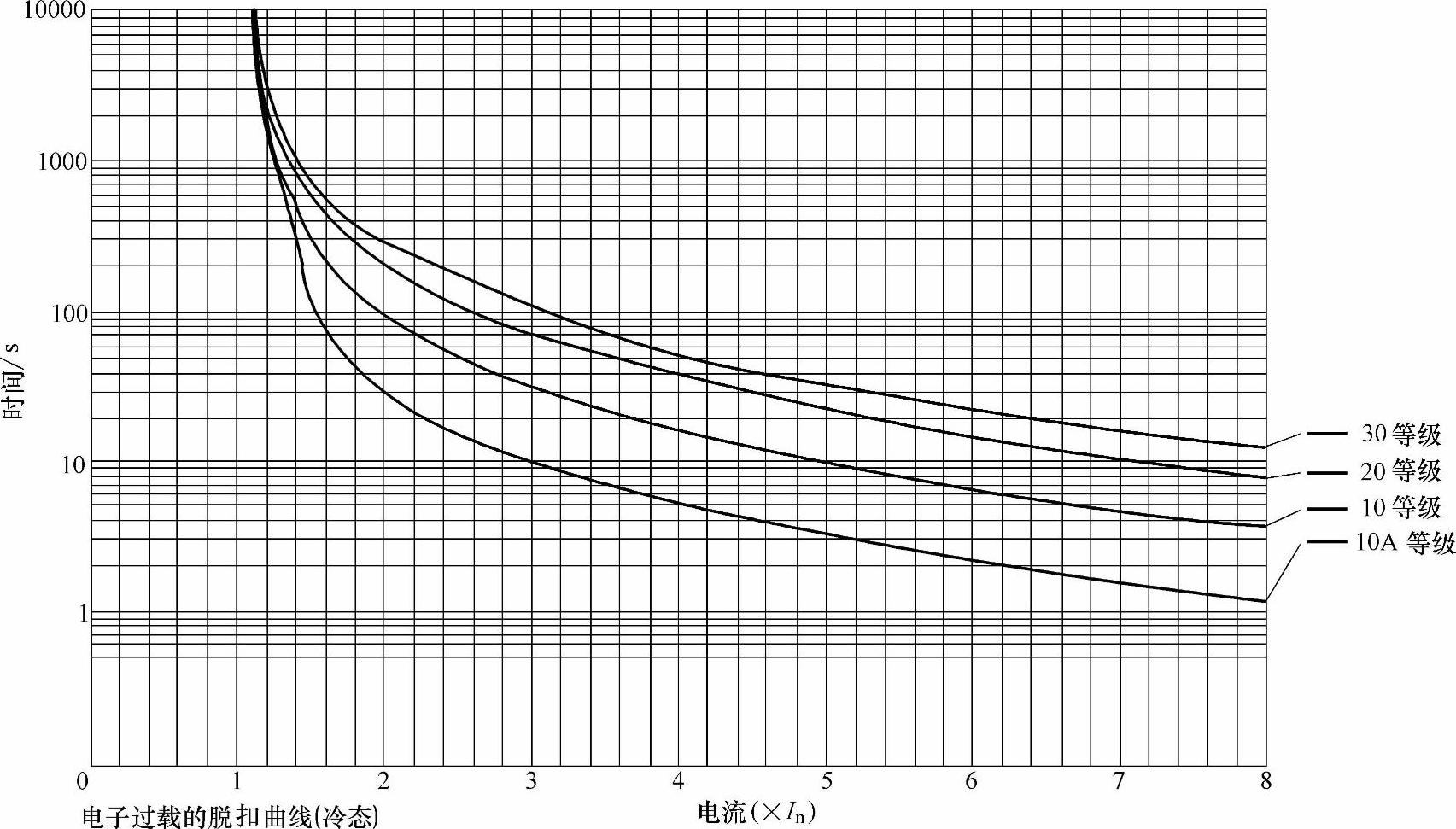
图16-39 脱扣等级曲线
3.断相保护
三相电源中断开一相或电动机三相绕组有一相断开,即为断相。电动机在断相状态下运行极易烧坏,必须采取相应的保护措施。断相实质是三相电流不平衡的一种拓展。
电动机断相保护应满足以下规定:
1)连续运行的三相电动机,当采用熔断器保护和断路器保护时,应装设断相保护;当断路器兼做电动机控制电器时,可不装设断相保护。
2)短时工作或断续周期工作的电动机,以及额定功率不超过3kW的电动机,可不装设断相保护器件。
3)断相保护器件宜采用断相保护热继电器,也可采用温度保护或专用的断相保护装置。
软起动器的断相保护可以分为电压型和电流型两种。电压型断相保护是利用电压传感器采样三相电压,并判断和保护的,该种形式结构简单,但在电动机内部绕组断线等情况下,无法检出。电流型断相保护用电流互感器检测每相线电流值来进行断相判断和保护,因而对于任何形式的断相均可以进行保护。
电流型的不足与负载率有关,当电动机负载率低时,电流互感器二次侧负载电阻上的电压低,难以实现断相保护。设定的最小保护电流值一般为额定电流的40%,这样可以避开三角形联结绕组的危险区域。
电动机三角形联结。电源断开一相而负载率又大于45%时,电动机某一相电流会超过额定值。当电动机内部一相断开电源未断相且负载率小于52%时,三相电流差别较大。所以负载率45%~52%时为危险区域。
可以设定软起动器起动时的电流范围为2%~40%,如果电流小于此值,达到规定的延时后保护就会动作,延时时间可设定在0.1~90s。
4.轻载保护
轻载保护属于工艺保护措施,有些工业设备,当负载电流减小到某一阈值以下时,往往反映出该设备出现了故障,轻载保护即是针对这种情况而设定的。当软起动器检测到输出电流减小到设定值以下时保护动作,通常为报警而不是停止电动机运行。此项功能只针对电动机的运行状态,起动过程无效。
轻载保护电流参数设置范围为5%~50%的电动机额定电流,轻载保护动作参数可以设置为三个选择:无效、报警、停机。
5.接地故障保护
电动机接地故障保护应满足以下规定:
1)每台电动机应分别装设接地故障保护装置,共用一套短路保护电器的数台电动机可共用一套接地故障保护装置。
2)接地故障保护应符合现行国家标准GB 50054—2011《低压配电设计规范》的规定。
3)当电动机的短路保护器件满足接地故障保护要求时,应采用短路保护兼作接地保护。
按美国国标规定,接地故障电流可设定为1~100A,保护动作延时可设定为0.1~90s。
6.过电流保护
因晶闸管抗浪涌能力较差,当发生短路或过载故障,而器件中流过大于额定值的电流时,易使器件温度迅速升高而导致器件烧坏。实践表明,过电流是器件损坏的主要原因,因此应该首先考虑过电流保护。电路过电流保护主要有电器保护和电子保护两种。
过电流保护最常用的是熔断器,利用熔断的极短时间来保护器件。经常也采用过电流继电器、过载继电器、直流快速熔断器等。通常在电路中采用几种措施配合来提高可靠性和合理性。
(1)主要保护方法
1)在交流进线回路串接电抗器或采用漏抗较大的整流变压器,利用电抗限制交流侧短路时产生的故障电流,但在在交流电流较大时将产生较大压降。
2)交流断路器保护。动作时间为0.1~0.2s,通常接在装置交流输入侧,作为后备保护,断路器动作后,整台装置退出运行。
3)过电流继电器保护。分为瞬动式和电磁式两种。瞬动式过电流信号取自电流互感器,动作时间为100~200ms,通常接在触发电路中,过电流时切断触发信号;电磁式继电器直接接在小功率装置的主电路上,过电流时动作。
4)热继电器。易受环境温度影响,动作速度较慢,整定值分散性较大。通常接在输入输出主电路中,作为过载保护。
5)快速熔断器。它是专门用来保护电力半导体器件过电流的。在流过6倍额定电流时,动作时间小于20ms,既可用于器件保护,也可用于电路保护。接入电路的方式有臂接和相接,通常为相接。快速熔断器额定电流有效值应小于被保护晶闸管的额定电流有效值,同时要大于流过晶闸管的实际电流有效值。
过电流电子保护按采样方式可以分为直接检测电子保护和间接检测电子保护,按保护动作可以分为切断式保护和限流式保护。
(2)采样方式
1)直接检测电子保护。通过检测元件输出电流,判断过电流故障完成保护。根据输出电流大小,可以采用电阻检测和传感器检测两种方法。前者检测无延时、结构简单、成本低,但与主电路不隔离,适用于小功率器件。后者成本高,且选择传感器需考虑响应速度,但与主电路隔离,适用于大功率器件。
2)间接检测电子保护。不直接检测电流,而是通过检测导通情况下输入、输出电压或其它参数,间接计算电流判断故障完成保护。
(3)保护动作
1)切断式保护。当开关器件输出电流超出设定值时,保护电路动作,器件输出被切断。该切断不能恢复,必须等到重启才能恢复。
2)限流式保护。当开关器件输出电流超过限值时,保护电路动作,并不是关闭器件控制电路。而是控制输出脉冲使电压下降,将电流维持在限定值内。
美国国标规定,过电流保护可设定为50%~800%,保护动作延时可为0.1~90s选择。
7.起动次数保护
根据GB 14048.6—2008标准规定,软起动器有五种额定工作制:8h工作制、不间断工作制、断续周期工作或断续工作制、短时工作制、周期工作制。
8h工作制,指软起动器处于全电压状态时,承载稳定电流持续足够长时间使电器达到热平衡,但超过8h必须分断。不间断工作制,指软起动器处于全电压状态时承载稳定电流超过8h(数星期、数月、数年)时不分断。断续周期工作制或断续工作制,指软起动器处于全电压状态时的有载时间与无载时间有一确定比例值,此两个时间都很短,不足以使用电器达到热平衡。短时工作制,指软起动器处于全电压位置的持续时间不足以使电器达到热平衡状态,有载时间之间被空载时间隔开,空载时间足以使电器恢复到等于冷却介质的温度。短时工作制的通电时间标准值为:30s、1min、10min、30min、60min和90min。
所以软起动器的每小时起动次数可设定为1~20次,再次起动间隔可设定为1~200min。
8.电动机过热保护
软起动器可根据设定的整定电流和实际的起动或运行电流不断计算电动机的温升。高端软起动器也集成有正温度系数(PTC)传感器端口,可以接受PTC传感器的处理,进行直接温度保护。与过载保护等级相同,热保护等级分为10A/10/20/30级。
部分高端软起动器在电动机已停止或起动器被关闭后,即使控制电路未通电也会记忆和计算电动机的热状态,可以防止电动机在温升过高的情况下重新起动。计算的电动机热状态可以在菜单中读取。
同时电动机热保护功能可以被禁止。可以将起动器计算出的电动机热状态复位。在一台软起动器驱动多台电动机,热保护功能应被禁止,且每台电动机需要由单独的热继电器保护。
9.软起动器过热保护
软起动器的特性和安全工作区与温度密切相关。温度升高,其安全工作区将缩小。晶闸管模块与其它功率器件一样,在实际工作中由于自身功耗会引起管芯温度的升高。结温急剧上升直至达到或超过额定结温Tjm,如果不采取措施将这种热量散发出去,就会导致管芯特性变软,漏电流增加,直至完全过热击穿损坏。晶闸管的损耗主要由导通损耗(导通平均电流与导通平均压降乘积)、开关损耗和门极损耗三部分组成,其中最主要的是正向导通损耗。散热问题的总原则就是控制模块中管芯的结温Tj不超过手册中给定的额定结温Tjm。
常用的热保护措施有:
1)加强散热,将温升控制在安全范围内。根据设备的特点和使用环境设计合理的散热方式。对于风冷设备应选择合适散热器和适当的风道。对于水冷设备应确保水质、流量和水路畅通。
2)降额使用,由于晶闸管尺寸较大,内部温度分布不均匀,可能出现局部高温导致器件损坏,因此必须根据环境、散热和设备可靠性降额使用。
3)过热保护,检测晶闸管工作温度,若使用过程中出现异常而导致器件温度急剧上升,则停止设备运行。常用保护器有温度继电器、热电偶等,这种措施常用于晶闸管的热保护中。
温度继电器为双金属片热应变结构,使用方便。检测单元通常安装于散热器上,触头接入控制电路中。当检测单元检测到温度超过设定阈值时,便把信号送入微处理器,微处理器输出信号切断主回路。温度继电器的缺点是只能设置单一阈值。
使用热电偶或热电阻可以实时检测晶闸管温度,根据采样到的温度高低,分别采取起动风机、报警、停机等不同的处理办法。使用热电偶或热电阻需要进行相应的信号变换和处理,电路比温度继电器复杂。
在实际工作中,结温不容易直接测量到,因此不能用来作为是否超温的判断依据。通过控制散热器最高温度处壳温Tc来控制结温是一个有效的方法。由于PN结温和壳温存在着温度梯度关系,通过温控开关可以很容易地测量出晶闸管与散热器接触处表面最高温度处的温度,用温控开关测量出的壳温是否超过额定值来保护晶闸管正常工作。在实际电路设计中,增加一个或两个温度控制电路,分别控制风机的起动或主回路的断电停机。一般控制散热器最高处温度不超过75℃,这样就可以保护晶闸管在额定结温下正常工作。
10.晶闸管故障保护
该保护类型主要是针对晶闸管故障或触发电路故障。软起动器监测晶闸管导通状态,当未给予触发脉冲时晶闸管已导通,或者给出触发脉冲晶闸管未导通两种情况下,给出故障动作,停止设备运行。
晶闸管关断时,其A、K极之间相当于一个结电容。当突加阳极电压时会产生充电电容电流,此电流可能导致晶闸管误导通。因此对晶闸管的最大正向电压上升率必须加以限制,一般采用阻容吸收元件并联在晶闸管两端的办法加以限制。
晶闸管开通时,电流从靠近门极区的阴极开始导通,然后逐渐扩展到整个阴极区,直至全部导通,这个过程需要一定的时间。如阳极电流上升太快,使电流来不及扩展到晶闸管的整个PN结面,造成门极附近的阴极因电流密度过大、发热过于集中、PN结温会很快超过额定结温而烧毁,故必须限定晶闸管的电流上升临界值di/dt,一般在桥臂中串入电感或铁氧体磁环。
11.相序保护(https://www.xing528.com)
相序保护功能属于工艺保护措施,主要针对不允许反转的机械,试验时确定好转向后不允许电源反相。当由于外部电路改造或电源接线发生变化而使输入电源相序发生改变时,则此项保护会动作。此保护会不必设置参数。
12.速度到达时间保护
速度到达时间设置了电动机从起动开始到达满速的最长加速时间,可设置为1~300s,超过设置值,保护便动作。它可以防止电动机堵转或起动时间过长发热。
13.堵转保护
此项保护主要针对电动机,防止因电动机故障或负载机械故障导致的电动机无法起动,长时间处于大电流状态而烧毁电动机。这项保护功能是对电动机过载保护的补充。
软起动器通过采样输出电流,当起动设置时间已到而电动机仍维持较高电流时,则延时一段时间后堵转保护动作,设备停止工作。
参数范围:堵转延时时间参数可设置范围为0~15s,起动时间参数根据起动控制方式确定,如电压斜坡方式时间即为电压斜坡上升时间。
14.主回路过电压、欠电压故障保护
晶闸管对过电压非常敏感,一旦外加电压超过允许的最大值,晶闸管将立即烧坏,所以必须考虑对主回路的过电压保护。
1)超过晶闸管正常工作能承受的最大峰值电压称为过电压。主回路产生过电压的原因主要有开关过电压和雷击过电压两种。
①雷电引起的过电压。
②输入侧交流电源接通、关断引起的过电压。通常由供电变压器网侧开关分合、熔断器熔断时,通过变压器电磁感应耦合或绕组分布电容静电感应耦合产生。
③输出侧产生过电压。通常由于分断回路电感大或分断电流大产生。
④换相过电压。由于晶闸管在换相结束后不能立即恢复阻断能力,有较大反相电流流过。而恢复阻断时反向电流急剧减少到0,电路的电感会因反向电流的突变而在晶闸管两端产生过电压。
应该采取必要的措施使晶闸管承受的过电压限制在正反向不重复峰值电压URSM和UDSM值以下。当晶闸管关断,正向电流下降到零时管芯内部会残留许多载流子,在反向电压的作用下会瞬间出现反向电流使残存的载流子迅速消失形成极大的di/dt。即使电路中串联的电感很小,但由于反向电动势U=-Ldi/dt,所以也能产生很高的电压尖峰(或毛刺),如果这个尖峰电压超过晶闸管的最大峰值电压,就会损坏器件。
主回路的过电压保护措施有:①尽可能减少过电压源,降低过电压能量。可采取改善安装工艺,减少电路分布电感等措施。②可采用电子电路吸收过电压能量。该方法适用于瞬态过电压,RC吸收电路最为常见。③瞬态过电压也可采用非线性元件吸收,如采用雪崩二极管、压敏电阻等。
以吸收过电压的方法为例,在器件两端并联阻容吸收回路即RC电路,利用电容两端电压不能突变的特性吸收尖峰电压。RC电路要尽可能靠近晶闸管引线,且要尽可能短,最好采用无感电阻。RC电路不能借用门极中辅助阴极线,因辅助阴极线线径很细,回路中过大的电流会将该线烧断。RC电路直接并联在晶闸管的阳极和阴极之间,既可吸收瞬态电压峰值,又可抑制正向电压的上升率,RC参数的计算方法为
CS=(2~4)×10-3IT(AV)
RS=10~30Ω
PRS≥fCS(UARM/nS)2
式中 CS——RC吸收电路电容(μF);
IT(AV)——器件额定正向平均电流(A);
RS——吸收电路电阻(Ω),可按表16-5中经验值选取。
PRS——RC吸收电路电阻功耗(W);
f——电压频率(Hz);
UARM——反向工作峰值电压;
nS——每臂串联器件数。电容耐压一般为晶闸管电压的1.1~1.5倍。
2)主回路欠电压保护用来避免当电压过低或瞬间消失时,使电动机停转以后又自起动或设备误动作而造成的危害。应采取以下规定:
①按工艺或安全条件不允许自起动的电动机,或者为保证重要电动机自起动而切除次要电动机的情况下,应安装低电压保护。重要的电动机应装设短延时低电压保护,其时限可取0.5~1.5s。次要电动机宜装设瞬时动作的低电压保护。
表16-5 阻容元件的选取值

②需要自起动的重要电动机,不宜装设低电压保护,但按工艺或安全条件在长时间停电后不允许自起动时,应装设长延时低电压保护,时限可取9~20s。
③低电压保护器件宜采用低压断路器的欠电压脱扣器或接触器的电磁线圈,必要时可采用低电压继电器和时间继电器。当采用电磁线圈作低电压保护时,其控制回路宜由电动机主回路供电。当由其它电源供电的主回路失电压时,自动断开控制电源。
④对于不装设低压保护装置或装设延时低压保护装置的重要电动机,当电源电压中断后,在规定的时间内恢复时,其接触器应维持闭合状态或能重新吸合。
⑤具有备用设备时,为了在电源被取消后能及时断开电动机而投入备用设备,可装设瞬时动作的失电压保护或短延时的欠电压保护元件。对于整定时间,一般要求延时的时限大于备用电源自动合闸装置的动作时间,通常取1~10s。
欠电压保护的动作电压整定值UDZ可这样整定:对一般异步电动机,当负载转矩为100%额定转矩时,取UDZ=0.7UN。当负载转矩为50%额定转矩时,取UDZ=0.5UN。欠电压保护值参数可设置范围为5%~15%电源电压,欠电压保护动作时间参数可设置范围为0.5~20s。
15.操作回路过电压、欠电压故障保护
电路在接通断开时会产生过电压。软起动器控制回路电源对于这类过电压保护目前主要采用压敏电阻和瞬态电压抑制器(Transient Voltage Supperessor,TVS)两种器件。
压敏电阻是一种非线性元件,它是以氧化锌为基体的金属氧化物,在两个电极极间充填有氧化铋等晶粒。正常电压时,晶粒呈高阻态仅有100μA左右的漏电流,过电压时引起电子雪崩呈低阻态,使电流迅速增大吸收过电压。其接法与阻容吸收电路相同,在交直流侧完全可以取代阻容吸收,但不能用作限制dv/dt的保护,故不宜接在晶闸管的两端。其优点在于具有正反向相同陡峭的伏安特性,正常工作时只有很微弱的电流通过元件。而一旦出现过电压,压敏电阻可通过高达数千安的电流,将电压抑制在允许范围内,并具有损耗低、体积小,对电压响应快等优点。其缺点是持续平均功率太小,如果选择不当,在正常工作时产生的电弧往往波及临近的设备,容易造成故障扩大化,设计时应予以注意。
压敏电阻选用步骤是:
(1)选定额定电压U1mA(漏电流1mA时的电压)

式中 U2L——变压器二次电压有效值。
(2)计算压敏电阻释放电流初值IRM(A)
式中 KZ——能量转换系数,空气断路器取0.3~0.5,油断路器取0.1~0.3;
I02L——三相变压器空载线电流有效值。
(3)计算压敏电阻最大电压URM
式中 KR——压敏电阻特性系数;
α——压敏电阻非线性系数,一般取20~25,取20时,KR=1.4U1mA。
(4)计算过电压倍数Kgu
(5)计算和校验压敏电阻的能耗 当电阻α=20时,压敏电阻能耗
A=26.5U1mAIPm1.05
式中 IPm——压敏电阻通流容量,指的是在规定波形时,允许通过的浪涌峰值电流。
TVS类器件当其两端受到瞬时高压时,能以极高的速度从高阻态变为低阻态吸收高达数千瓦的浪涌。TVS的部分型号性能参数见表16-6。
表16-6 TVS性能参数

控制回路欠电压保护的方法与主回路欠电压保护方法相同。
16.旁路接触器故障保护
正常旁路运行时,电流是从旁路接触器中流过的,当旁路运行时,旁路信号已经给出,但若旁路接触器未吸合或者吸合不可靠,则电流会全部从晶闸管中流过,导致过热,影响晶闸管的性能和寿命。旁路运行时检测到晶闸管端电压大于AC100V时表示旁路接触器故障。
以具有硬件过零检测电路的软起动器为例,正常情况下旁路后,电流过零点信号一直为低电平。如果旁路接触器不能吸合或者接触不良,那么过零信号就变成宽度大于50μs、周期为10ms的正脉冲,软件中在100ms内检测到这种正脉冲的数量大于8次时表示旁路接触器故障。
17.瞬停端子断开故障保护
一些高端软起动器,如正泰NJR3,具有外部瞬停的功能。在任何状态下使能瞬停端子,则晶闸管立即停止输出,旁路接触器立即断开。此时软起动器也会提示瞬停端子断开故障。
18.内外部配置错误保护
高端的软起动器,为防止用户配置出错,一般具有配置错误保护功能,主要有参数配置保护、内部配置保护和外部配置保护。
(1)参数保护主要方法
1)在任何状态下,软件连续10次检测到第二、第三电动机起动端子使能逻辑错误。
2)配置电动机起动顺序参数只有第一电动机起动,而第二电动机起动使能参数配置为第二电动机起动,当第二电动机端子使能时,应提示“参数错误”。
3)配置电动机起动顺序参数为第二电动机起动,而相应的第二、三电动机起动使能参数配置为第二、三电动机起动。这时起动第二电动机,完成后使能第二电动机起动端子。而此时若第三电动机端子使能,则提示“参数错误”。
(2)外部配置错误检测方法
1)第二电动机起动使能参数配置为无时,第二电动机起动端子使能或第二、三电动机起动端子同时使能,则提示“外部故障”;
2)第三电动机起动使能参数配置为无时,第三电动机起动端子使能或第二、三电动机起动端子同时使能,则提示“外部故障”。
(3)内部配置错误检测方法
1)当软起动器额定机型电流与硬件电路板不匹配时,报“内部配置错误”。
2)当主控板检测到(TuAD<0.1V)&&(TwAD<0.1V))&&(TvAD>0.15V)时,表示电源板为NJR3-90A以下(含),旁路开关是磁保持开关,旁路信号是脉冲信号。如果软起动器额定机型电流设置为NJR3-90以上时,报“内部配置错误故障”。
3)当主控板检测到(TuAD>0.15V)&&(TwAD>0.15V)&&(TvAD>0.15V)时,表示电源板为NJR3-90A以上,旁路开关是接触器,旁路信号是开关信号。如果软起动器额定机型电流设置为NJR3-90以下(含)时,报“内部配置错误故障”。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。