



8.7.6.1 传动机构
断路器的传动机构按操作方式不同,可分为手柄传动、杠杆传动、电磁铁传动、电动机传动和气动或液压传动五类。气动或液压传动工作性能较好,但要有相应的气压或液压发生装置。传动机构按闭合方式,又可分为储能闭合和非储能闭合两种。储能闭合是预先将一弹簧压缩,然后利用弹簧释放的能量使触头闭合,其优点是能保证恒定的闭合速度,与操作速度无关。
1)在选择和设计传动机构时应注意以下事项:
①手柄和杠杆传动的最大操作力最好不超过250N。为了满足这个要求,可以适当选择手柄长度和转动角度。
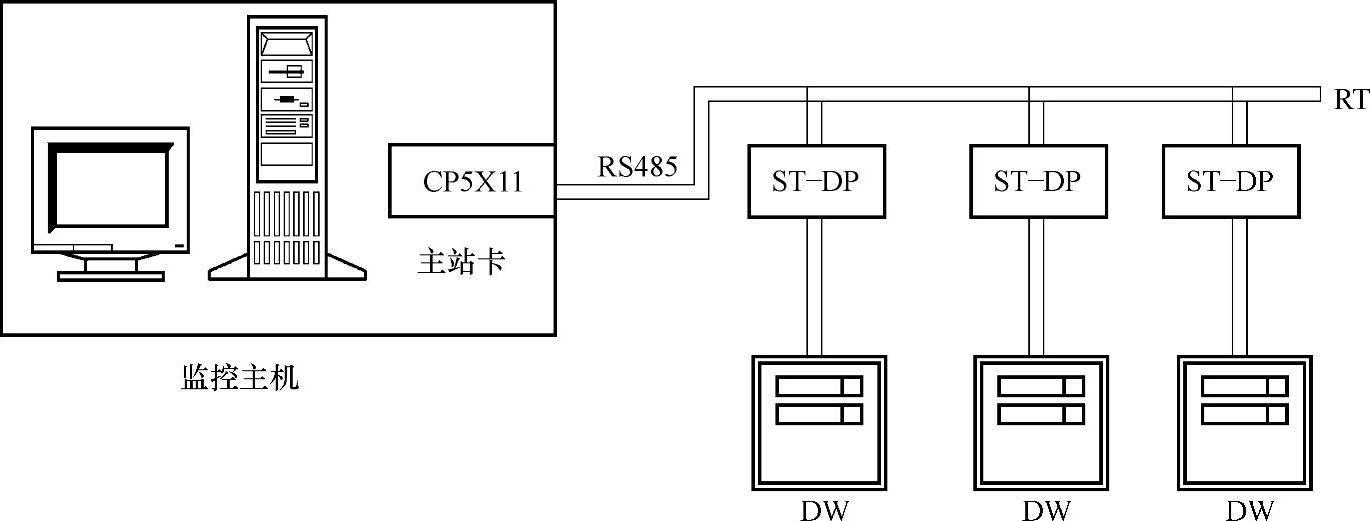
图8-120 PROFIBUS协议通信连接示意图
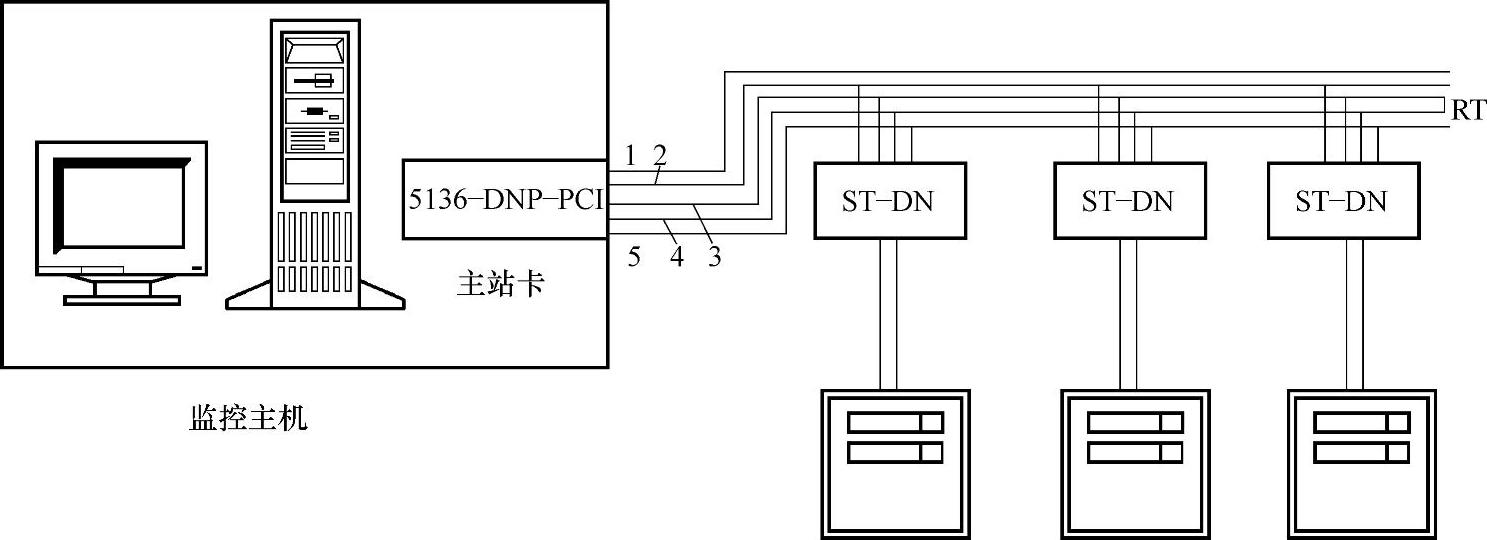
图8-121 DeviceNet协议通信连接示意图
②传动机构消耗的功率要小。大容量交流断路器可采用储能闭合和电动机传动,电动机的功率约为0.3~1kW。
③固有闭合时间(从闭合指令开始到断路器闭合的全部时间)要尽量短。电磁铁动作速度较快,所以在直流快速断路器和600A以下的交流断路器中有应用。
④闭合断路器时冲击应尽量小。如采用交流电磁铁传动,闭合时冲击较大。用交流电经硅整流器件整流后供电,可大大减小闭合时的冲击。
2)在设计传动机构时还应确保完成以下几个动作:
①在驱动力的作用下,使动触头向闭合方向运动。在闭合过程中,触头压力是在行程接近终了即触头接触后,才反应到传动机构上的,所以应使传动机构在行程末了阶段产生较大的力,以克服触头的反力。改变传动机构的杠杆比可达到这一目的,故目前几乎所有的断路器都采用接近或过死点的杠杆系统。小容量断路器采用一组这样的杠杆,大容量断路器则可采用两组。
②触头接触后应可靠地保持在闭合位置。有两种办法:一种是杠杆过死点;另一种是锁扣。前者适用于小容量断路器;大容量断路器则多采用不承受主力的锁扣。
③要求断开时触头应能迅速断开。一般采用弹簧来达到。若传动机构与触头系统之间是通过闭合弹簧来实现的,则闭合弹簧可兼作断开弹簧之用,不需要另加断开弹簧(如塑料外壳式断路器中的操作机构)。断开弹簧的力主要应克服运动系统的惯性质量和摩擦力,以保证运动系统有一定的断开速度。
④触头断开后应可靠地保持在断开位置。分断短路电流时,动触头系统特别是惯性质量较大的动触头系统断开与停挡(止钉)碰撞后,可能因反弹而造成触头再接通,引起电弧复燃。为了防止反弹,尽量增大断开弹簧力是措施之一,但是这又会使闭合力增大,对传动机构不利。在停挡上加装吸收碰撞能量的阻尼装置也是一种有效措施。最简单的阻尼装置是牛皮垫圈,也有用空气阻尼的。在大容量空气断路器中,则要采用防反弹锁勾装置。当动触头系统达到断开位置时,锁勾锁住动触头系统,防止其反弹。在机构再扣时,此锁勾再度释放,以便触头闭合。
图8-122所示是一种惯性锁勾式防反弹簧装置。当触头断开时,触头连动轴绕主轴逆时针方向快速转动,当与锁勾碰撞后,在惯性作用下,锁勾绕A轴顺时针方向抬起,将触头连动轴勾住,使其无法反弹。碰撞消失后,靠重量下落复位,可再次操动触头闭合。(https://www.xing528.com)
8.7.6.2 自由脱扣机构
自由脱扣机构的功能是实现传动机构和触头系统之间的联系。自由脱扣机构扣上时,传动机构应带动触头系统一起运动,并使触头闭合。当脱扣之后,即解脱了传动机构与触头系统之间的联系,其脱扣瞬间与传动机构的位置无关。
图8-123所示是自由脱扣原理图。图8-123a表示没有自由脱扣的系统。当推动门手柄向左,触头闭合。但当有短路电流存在于主电路中时,触头间会出现巨大的电动力,此力可作用于人体,造成伤害。图8-123b做了改进,将连杆EB分为两段:EM和MB。当有短路电流通过主电路时,触头被斥开,并可达到断开位置,即使手柄D保持在闭合位置也不受影响,电动力作用不到人手,即有了自由脱扣。但这种机构在M点的脱扣力较大,不宜采用,进一步改进成图8-123c所示。即把M点变成PQ两点,用一脱扣板联系,其F端扣于半轴上。当有脱扣力作用于G轴使其顺时针方向转动一角度,自由脱扣机构被释放,触头断开。当GP长度明显大于PQ长度时,脱扣力可大大减小。
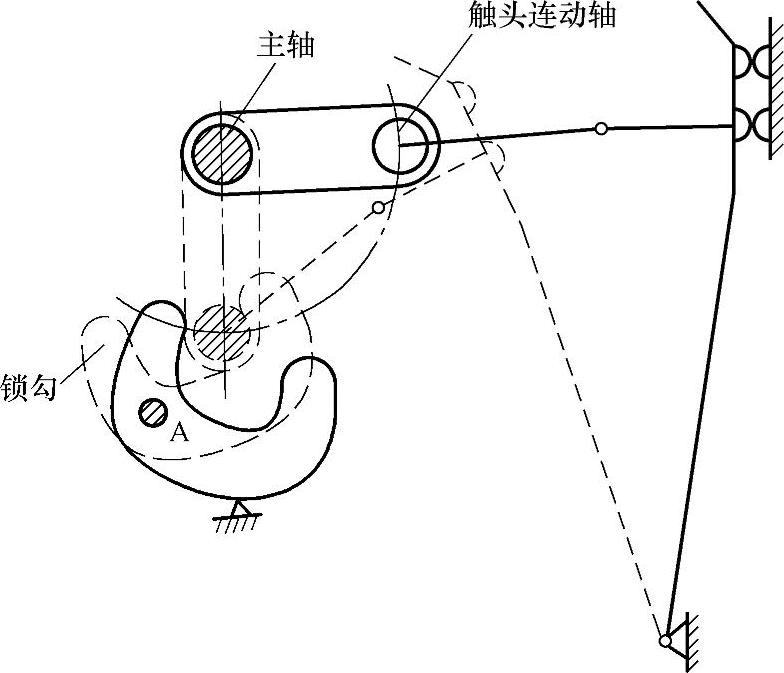
图8-122 惯性锁勾式防反弹簧装置
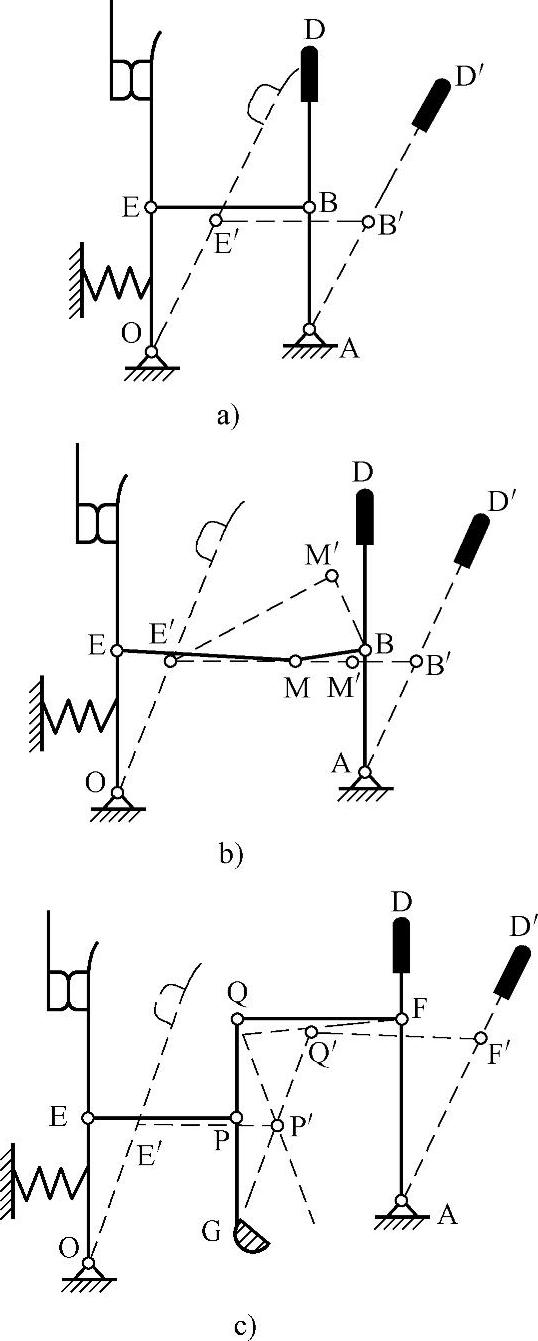
图8-123 自由脱扣原理图
图8-124所示是一个用于塑料外壳式断路器的自由脱扣机构,图8-124a所示为机构处于脱扣位置,如要闭合操作,首先要扳动手柄(顺时针方向),使机构再扣,进入图8-124b所示的位置,这时再扣板被锁扣扣住,可把O4看成定点,做好了闭合准备。O4O3O6组成四连杆机构,当手柄向左扳动时,弹簧力线改变并拉长,当弹簧力线越过轴O3时,O4被弹簧拉动迅速绕O3转动,也就是O1O6绕O6转动,使触头闭合(见图8-124c)。若要手动断开断路器,只要顺时针方向扳动手柄,使弹簧力线越过O3,则可使触头断开。过电流脱扣器或欠电压脱扣器动作均使脱扣轴顺时针转动一个角度,使再扣板脱扣,四连杆变成了五连杆,断路器断开。这种自由脱扣机构简单,闭合和分断用同一根弹簧,且能达到储能闭合,在世界各国都有使用。其缺点为再扣力大,不适用于大容量断路器。
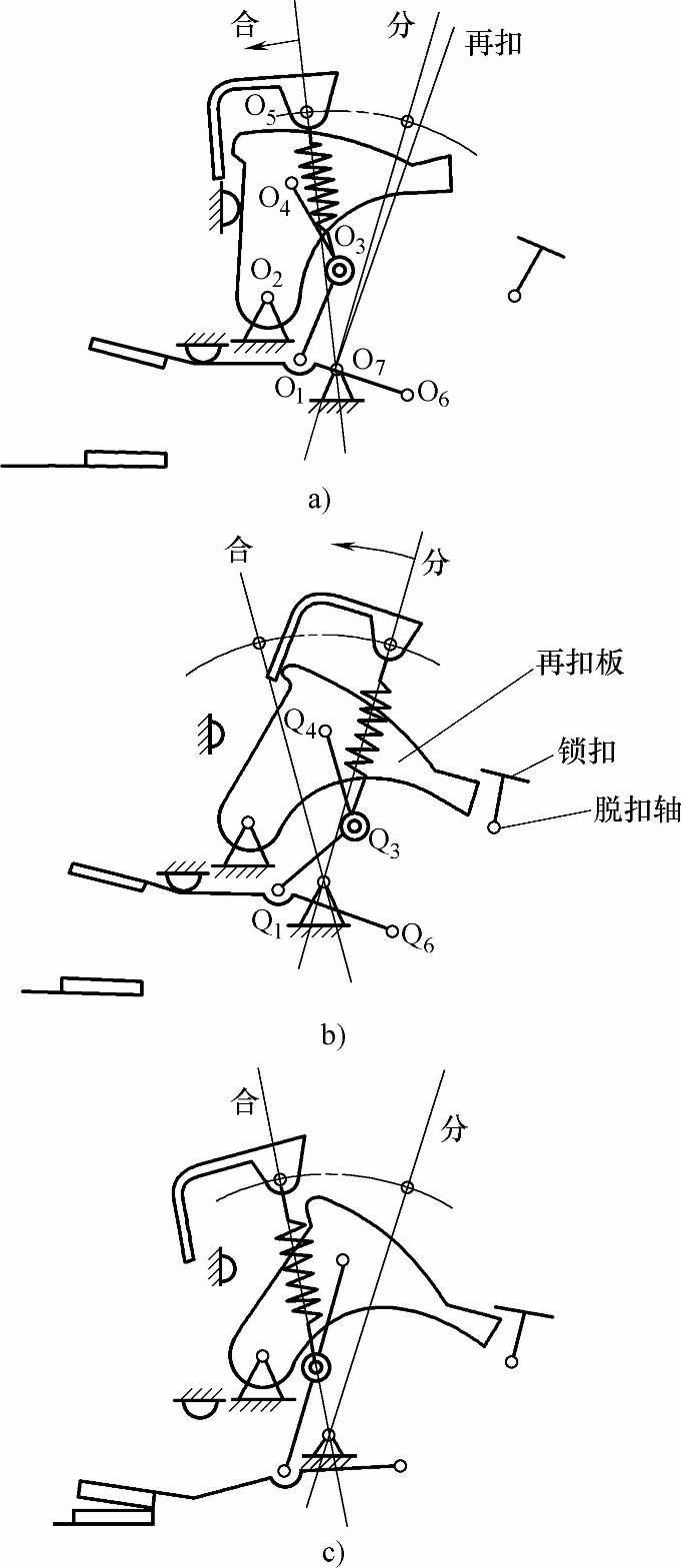
图8-124 塑料外壳式断路器的自由脱扣机构
在大容量断路器中,采用有两级再扣的自由脱扣机构,如图8-125所示。L形连杆7扣在杠杆11的滚柱上,而杠杆11又扣在分断脱扣半轴10上。这样把机构中的巨大的力可减至10N以下,保证可靠脱扣。机构闭合也用到两套四连杆机构。当再扣好L形连杆7不动,其右端可视为定点,则连杆3、9、12为一副四连杆,连杆12、13、14为另一副四连杆,当储能杠杆上滚轮推动连杆3向左运动时,可使触头达到闭合位置。
储能是高速电动机经变速后带动凸轮6顺时针转动而成的,当凸轮推动滚轮B至顶点时达最大储能位置,使储能弹簧压缩。凸轮再转过一点时滚轮B落下,储能弹簧力被滚轮C顶住,不能释能。需闭合断路器时,通过闭合按钮使释能脱扣半轴脱扣,储能杠杆4上的滚柱推动连杆3,使触头高速闭合。
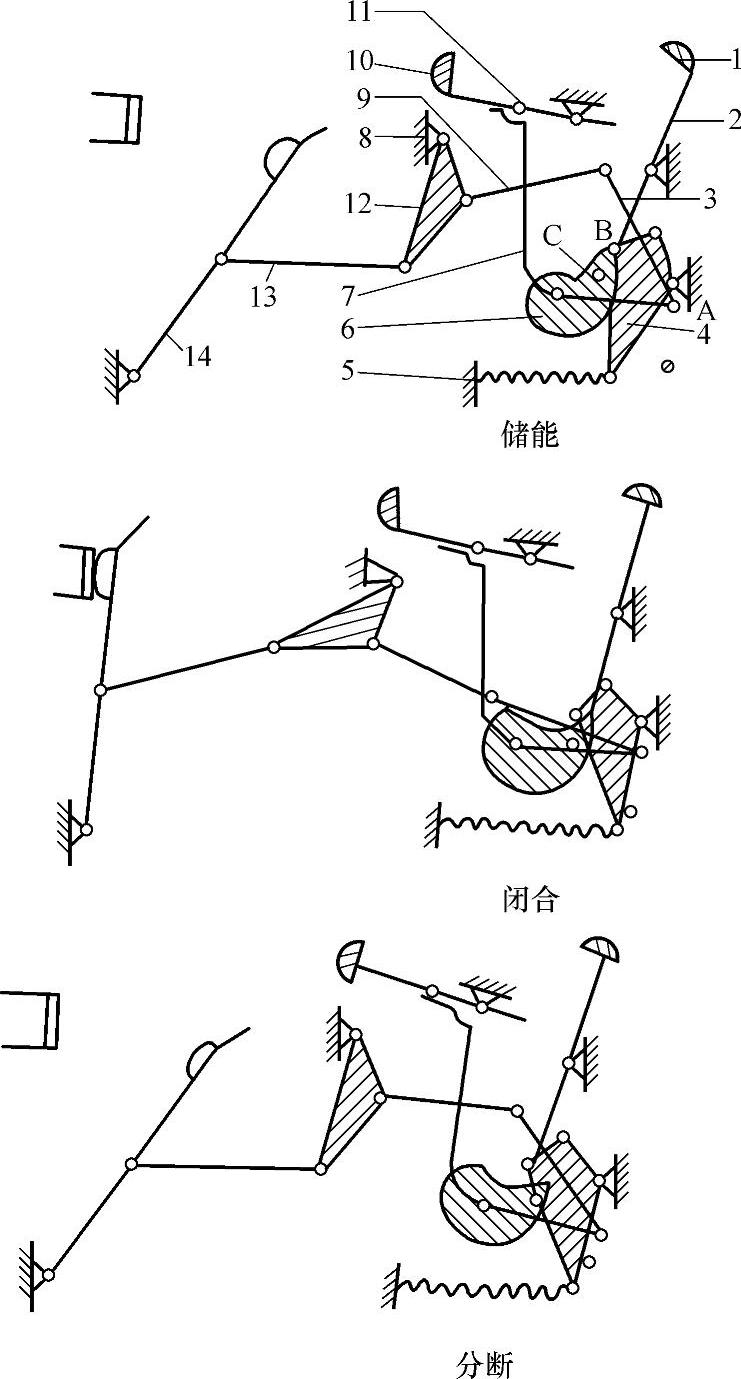
图8-125 具有两级再扣的自由脱扣机构
1—释能脱扣半轴 2—杠杆1 3—连杆2 4—储能杠杆 5—储能弹簧 6—凸轮 7—连杆1 8—主轴 9—连杆3 10—分断脱扣半轴 11—杠杆2 12、13、14—连杆
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。