



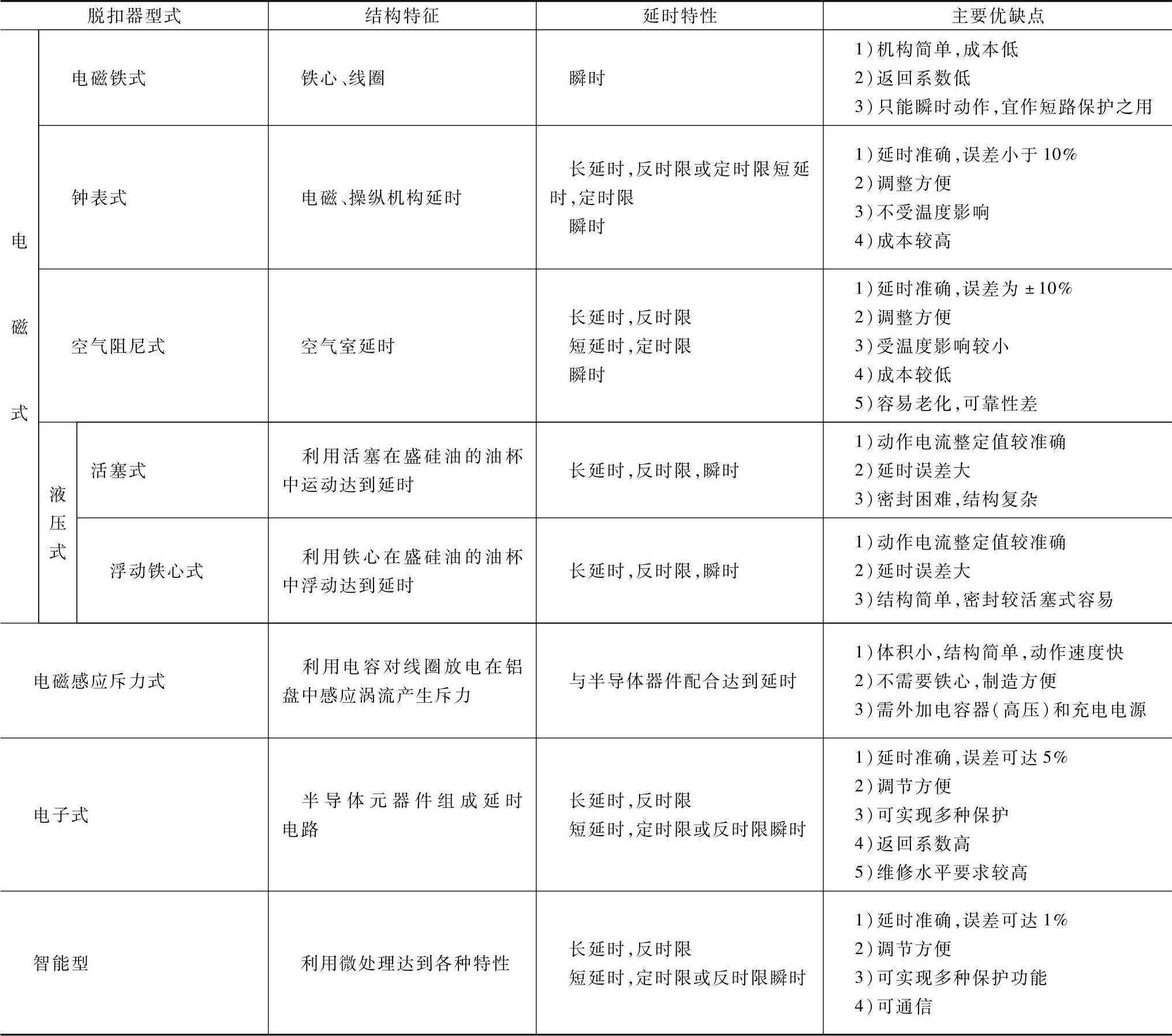
过电流脱扣器有许多类型,其主要类型见表8-52。
现代断路器中应用最广的是热磁式脱扣器(热式+电磁式)和智能型脱扣器。额定电流较小的断路器,特别是小容量塑料外壳式断路器多采用热磁式脱扣器;大容量的断路器则多采用智能型脱扣器;电磁感应斥力式脱扣器用于直流快速断路器中。
表8-52 过电流脱扣器类型一览表

(续)
8.7.5.1 热脱扣器
热双金属片式脱扣器,其工作原理是利用电流的热效应。当过载电流通过双金属片时,双金属片发热而弯曲,推动断路器的脱扣轴发生脱扣。电流越大,动作时间越短,适合于制成反时限脱扣器。其保护特性较接近于被保护装置的过载特性,电动机保护用的断路器多选用这种脱扣器。
双金属片的加热方式有三种:直接加热、间接加热和复式加热,如图8-103所示。直接加热是以电流直接通过双金属片(见图8-103a),使双金属片发热,一般适用于6~100A的电流范围。间接加热(见图8-103b)是将双金属片置于加热元件上,过载电流只通过加热元件,加热元件的热量通过热传导传递给双金属片。最方便的发热元件就是断路器载流体本身,在装置双金属片部位减小其载流截面积,使其有适当的发热量。复式加热是将双金属片同热元件串联(见图8-103c),小型断路器(6A以下)多采用这种加热方式。
图8-103d为互感器加热,是用互感器的二次电流直接加热双金属片,是直接加热的一个特例,适用于大容量断路器。
一端固定的长条矩形双金属片产生的推力(N)公式为
当均匀加热到τ度时,双金属片自由端的挠度(mm)公式为
式中 δ——双金属片厚度(mm);
b——双金属片的宽度(mm);
λ——双金属片的有效长度(从固定端到力的作用点)(mm);
τ——足够使脱扣器动作的双金属最高温升(℃);
τ=Q-Qc;
Q——双金属片工作温度(℃);
Qc——室温(℃);
E——弹性模数(N/mm2);
K——比弯曲,查材料表。
E、K为双金属片材料的固有特性参数,可从双金属片材料性能表中查到。
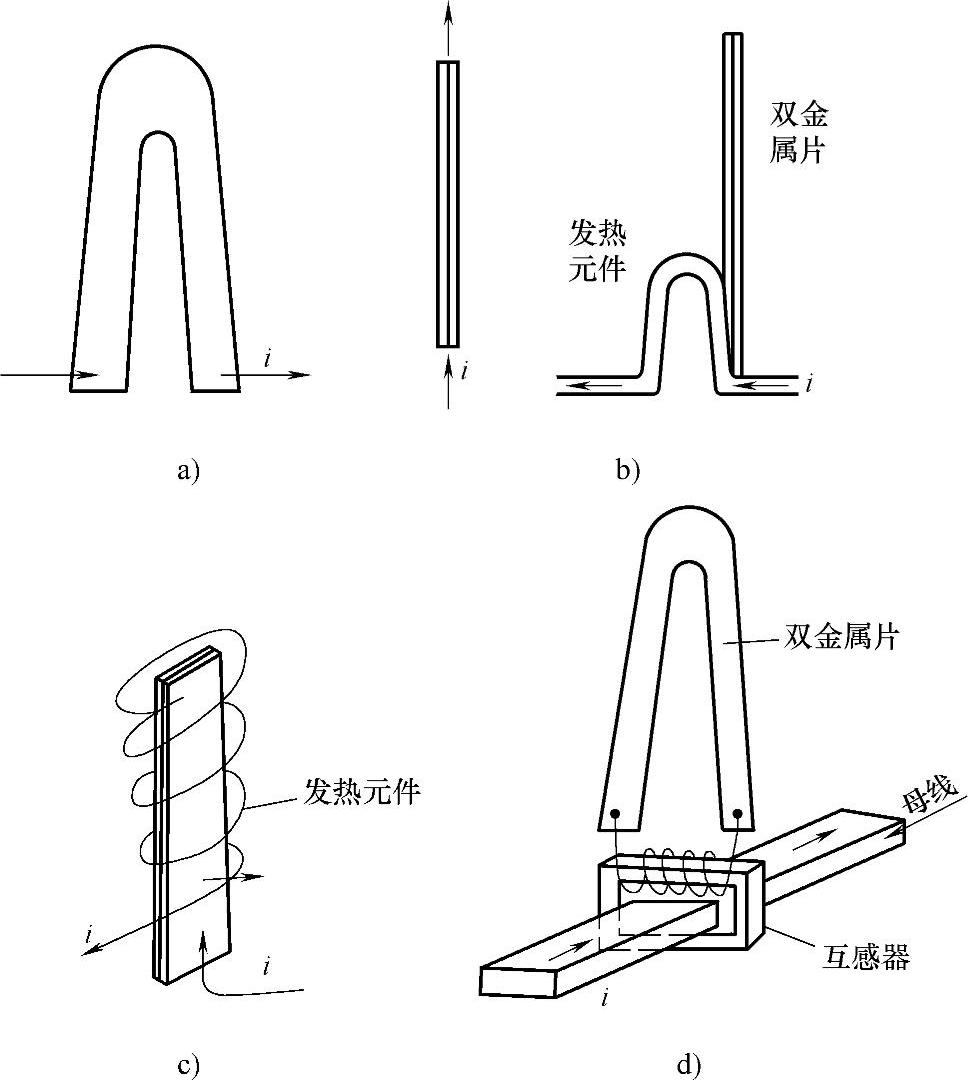
图8-103 双金属片加热方式
a)直接加热 b)间接加热 c)复式加热 d)互感器加热
双金属片的厚度δ和宽度b决定双金属片的推动力,双金属片的厚度越厚、宽度越大,推动力就越大。但厚度大,其挠度就小,也就是脱扣行程越小。要有足够的挠度就要有足够的双金属片长度t,这几个参数是互相制约的,还和具体结构有关。如果三相双金属片共同作用到公共的脱扣轴上,则双金属片所产生的推力F需比机构脱扣的力大6~10倍,以缩小在过载临界电流时一个和三个双金属片的动作误差。
对直接加热的双金属片设计时,要考虑双金属片会受到短路电流的冲击,如果其截面积太小,将会在大短路电流通过时被烧掉。因此双金属片常和电磁式脱扣器串联,组成热磁式脱扣器,过载电流时,双金属片动作,在短路电流通过时,由电磁脱扣器瞬时动作,既保护双金属片,也保护了电路和电气设备。
热双金属片式脱扣器易受环境温度的影响,使动作整定值产生误差。为了弥补此误差,可采用温度补偿措施,图8-104所示是一种最简单的温度补偿原理图。只要脱扣指采用和热脱扣器同样的双金属片材料制造,取同样的几何尺寸,就可实现全补偿。当环境温度变化时,两片金属片挠度完全相同,所以双金属片自由端与脱扣指作用点之间的距离保持相对不变,这就起到了温度补偿的作用。
8.7.5.2 热继电器式脱扣器
利用电流互感器与现有热继电器组合达到过载保护特性,热继电器式脱扣器如图8-105所示。
设计这种脱扣器只要选择一种适合的热继电器(选用5A或6.3A的热继电器较为合适),但最好要有温度补偿性能,再设计一个电流互感器与之配合。改变互感器二次绕组的匝数,可达到不同的额定电流。
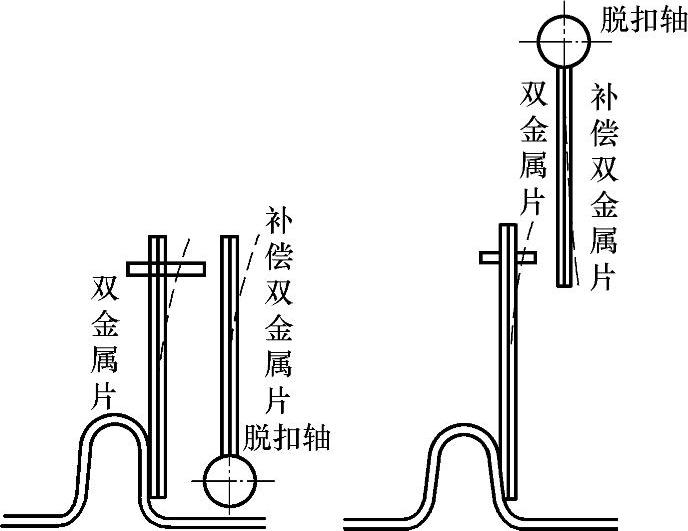
图8-104 热双金属片式脱扣器的环境温度补偿
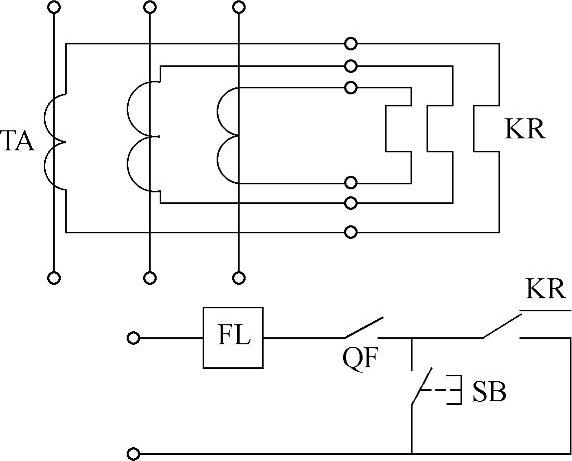
图8-105 热继电器式脱扣器
设计电流互感器需确定互感器匝数、铁心截面积、二次导线线径三个主要参数。电流互感器的磁动势方程为
I1N2=I2N2+I0N1
式中 I0N1——励磁磁动势,因其值很小,可忽略不计,则有
式中 N1——一次绕组匝数,一般为1~5匝,对直穿型互感器,N1=1,则二次侧匝数为
式中 I1——一次电流,即主电路电流(A);
I2——二次电流(A)。
互感器铁心有效截面积(m2)为
铁心的标称截面积(m2)为
Sp=S′p/Kd
式中 f——频率;
Kd——铁心叠片填充系数,可取0.9~0.95;
BF——铁心中磁通密度,决定于硅钢片厚度和牌号,对0.5mm,DR440-50热轧硅钢片可取BF=0.8T。
二次绕组感应电动势为
E2=I2[(R2+R1)+j(X2+Xl)]
式中 R2——二次绕组电阻;
RL——负载电阻;
X2——二次绕组电抗;
XL——负载电抗。
在近似计算中,可忽略j(x2+xl)项,则
E2=I2(R2+RL)
式中 RL——热继电器(或双金属片)和连接导线电阻之和;R2在导线直径和二次绕组尺寸确定后可计算出。
二次绕组导线截面积(mm2)为
式中 j2——二次绕组电流密度,对于铜导线j2=2~5A/mm2。如果确定二次电流为5A,则导线截面积就可求出。
互感器初步设计完成后,最终需通过试验修正设计参数。
由于热继电器式脱扣器是借助于热继电器的触头去接通断路器的分励脱扣器线圈而使断路器断开,要求用户配备可靠的分励电源。
8.7.5.3 电磁感应斥力式脱扣器
这种脱扣器的特点是动作速度快,可在1ms内使机构动作,适用于直流快速断路器。这种脱扣器的结构非常简单,由一个扁线圈和一个铝盘(或铝环)构成,其原理图如图8-106所示。
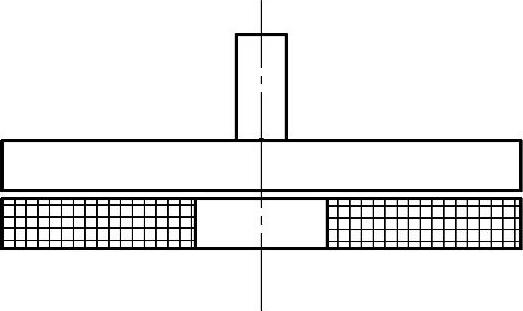
图8-106 电磁感应斥力式脱扣器原理图
这种控制放电回路较为复杂。控制放电回路需要辅助电源断相保护,高压充放电触发回路。当过电流信号电压达到晶体管峰点电压时,晶体管导通,使已充电的高压电容器向电动斥力脱扣线圈放电,这时在铝环中感应出涡流,它与脉冲电流产生的电动斥力,使短路环撞击保持机构中的脱扣板,保持机构释放,使断路器断开。
放电电流与储能电容的电容量和电压有关,电压越高,放电电流越大,得到的斥力也越大,但是电压太高对工作可靠性不利。对辅助电源和可靠性要求高,一般要求有辅助回路的欠电压或失压保护措施,因而限制了这种脱扣器的应用。
8.7.5.4 智能控制器
智能控制器可分为保护用智能控制器和通信智能控制器两种。
1.保护用智能控制器
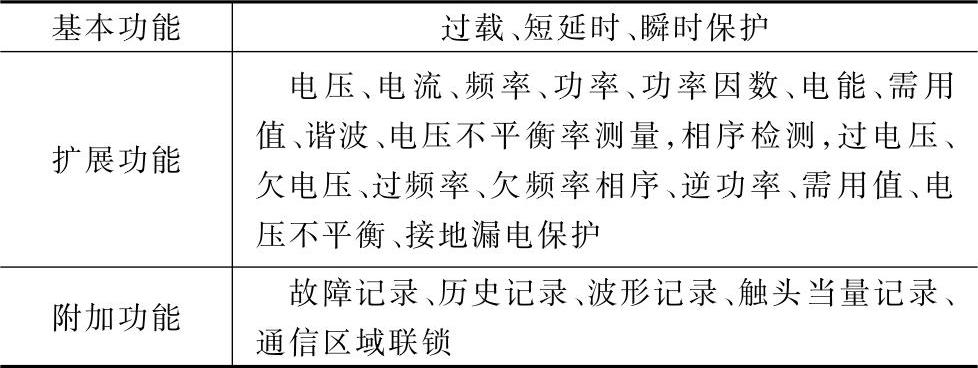
保护用智能控制器简称智能控制器或控制器,是断路器的核心部件,其基本功能满足断路器的过电流短路保护,对断路器的负载电流进行测量、监控,对故障电流进行分析及发出对故障电流的处理信号,其扩展功能能满足各种电量的测量及通信等功能。典型的产品是上海磊跃自动化公司的ST3智能控制器。该公司为我国同行业定点专业生产企业。本节将以ST3智能控制器为基础,论述智能控制器的设计要求。该产品是专用于断路器配套的产品,故其外形尺寸、脱扣打击点、安装尺寸等必须满足断路器本体的要求。智能控制器的功能见表8-53,这种控制器可达到各种保护特性。智能控制器由电源、信号采集、微机控制、信号输出、人机界面等部件组成,其原理框图如图8-107所示。
表8-53 智能控制器的功能
过载保护特性可以有多种选择,可满足不同的保护对象的要求,见表8-54。
表8-54 过载保护特性
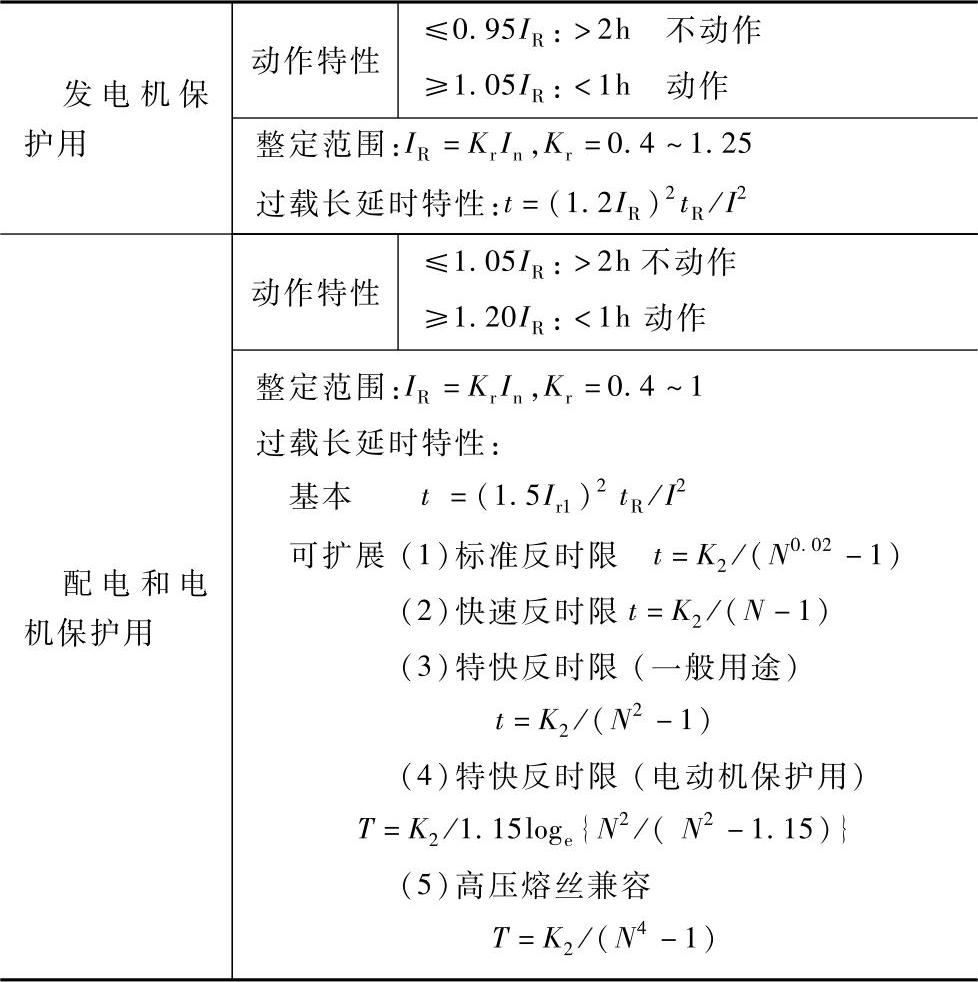
注:IR —整定电流;tR—整定时间;I—实际通电电流。
K2符合标准IEC255-16,C1~C16可选。
N=I/IR。
(1)控制器电源 智能控制器的电源的保护功能电路应与线路电压无关,其扩展功能部分及附加功能部分可通过线路提供电源。控制器的电源部分主要是针对保护功能而设计的,控制器电源原理电路如图8-108所示。
控制器电源通过主回路电流及速饱和变压器产生电源。当电流大于规定值(包括在极限短路电流时),应提供控制器的正常工作电源,从图8-108中可看出,有检测工作电压的线路,当电压超过一定范围时,通过场效应晶体管VF短接电路,以保证工作电源的稳定。
速饱和互感器的设计条件:
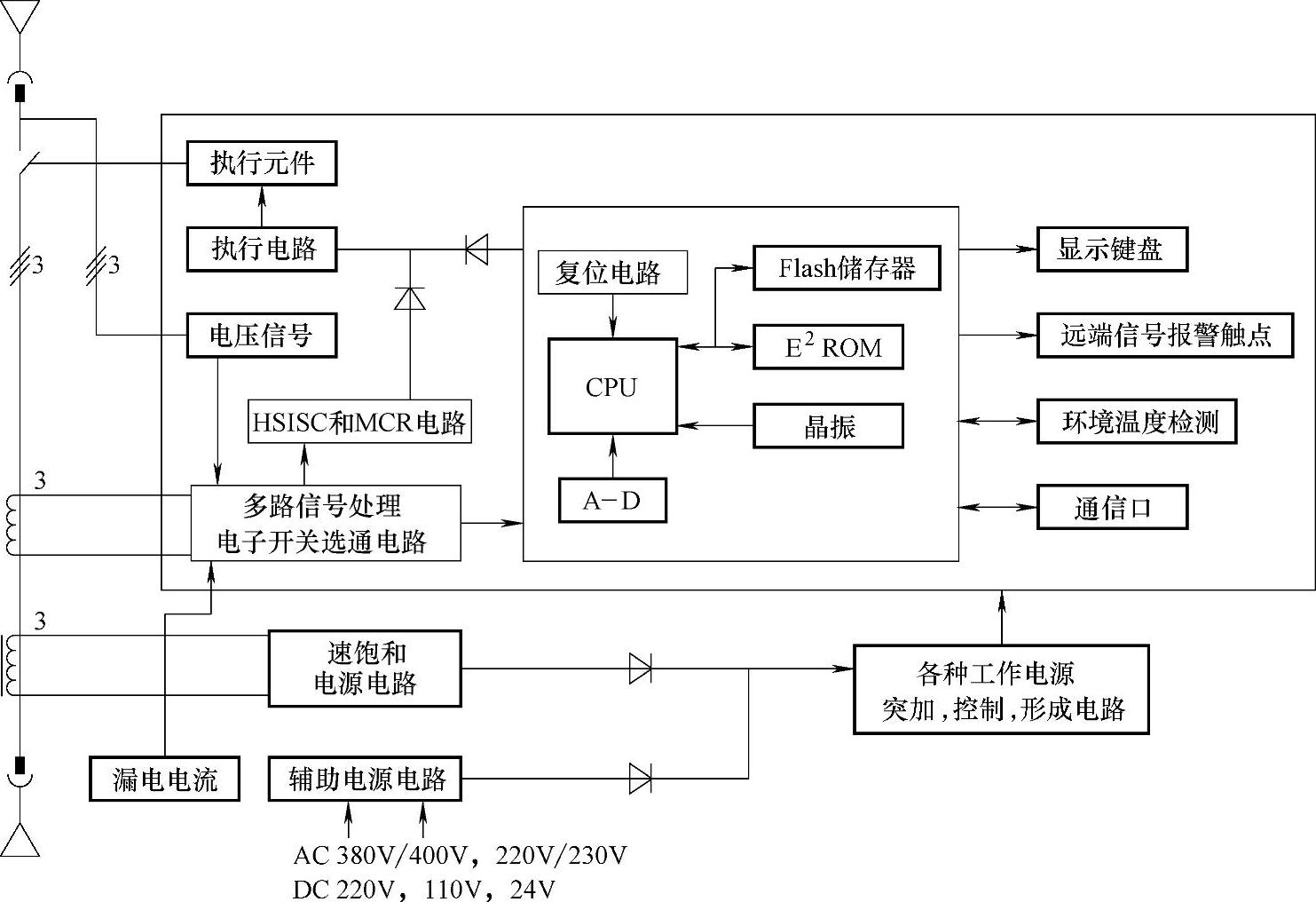
图8-107 智能控制器原理框图
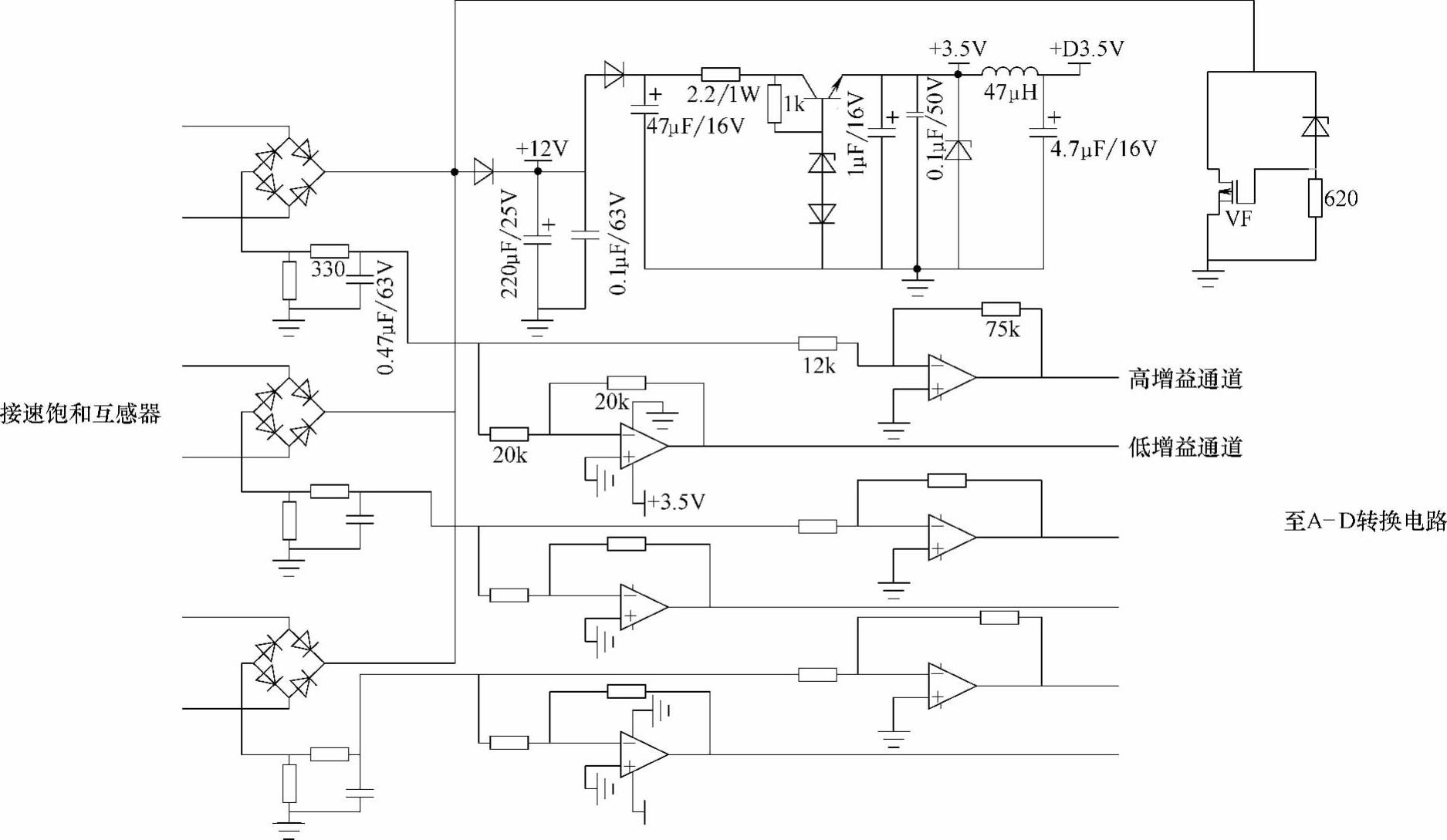
图8-108 控制器电源原理电路
1)速饱和互感器是工作在断路器的微观环境温度下,同时考虑在故障条件下产生的温度,速饱和互感器的工作环境温度为
T=Ta+Tb+Tf=150℃
式中 Ta——断路器工作环境温度,Ta=55℃;
Tb——断路器母排温升,Tb=70K;
Tf——在故障电流时产生的温升,Tf=25K。
上述的温度是极限情况,如额定电流较小的断路器,可以取较小的数值。
速饱和互感器绝缘材料的耐热等级根据散热的环境温度和速饱和互感器的温升选取。
2)控制器所需功率Ud、Id。
3)速饱和互感器安装在断路器上的极限尺寸。
4)控制器起始工作的一次电流I=KI1(单相),K取0.2~0.5。
速饱和互感器需根据所规定的极限的尺寸进行设计,结构如图8-109所示。
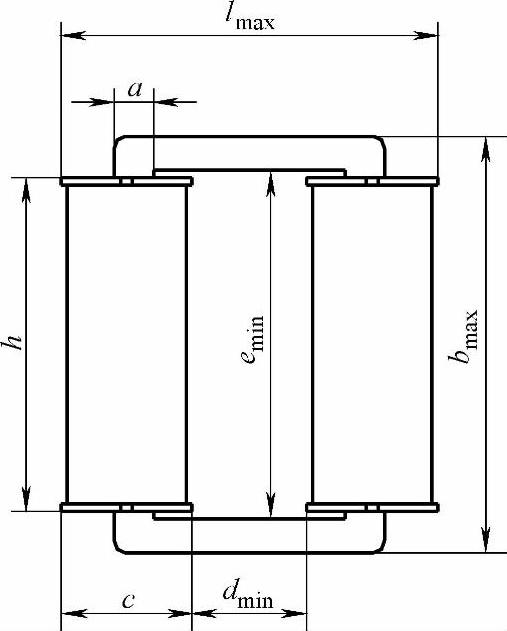
图8-109 互感器结构(https://www.xing528.com)
注:外形lmax、bmax为结构允许的极限尺寸。内腔emin、dmin为铜排允许的极限尺寸。
I2=Id/0.9 I1=NI2
当滤波电容足够大时,电压Ud认为是直流电压,互感器感应出来的电压为梯形波,励磁电流为锯齿波。具体计算参阅2.5.4.5节中2,磁通密度选取1~1.4T。由于互感器的工作环境温度较高,电流密度取值范围为1~2A/mm2。如不满足上述公式,要重新设计。
(2)控制电源的保护 当一次电流超过控制器启动工作电流KI1,直至极限分断电流时,互感器在电流过载状态下,致使Ud升高,图8-108中设有电压自动调整回路,使过载电流泄放,保证Ud稳定。当大的故障电流突然产生时,互感器会产生很高的电压,所以互感器二次绕组端并有快速稳压管或压敏电阻以吸收过电压。
外接辅助电源与互感器产生的电源以“或”的形式连接,以保证控制器的其他功能正常运行。
(3)信号采集 通过互感器采集一次电流,由于断路器的工作电流和故障电流的范围很大,所以信号采集要考虑很大的动态范围。
塑料外壳式断路器的体积小,仅能由电源互感器产生信号,其线性动态范围为(1~3)I1。超过线性范围,在(3~12)I1范围时,由软件来补偿。当大于12I1时,电流值不作检测,仅发出脱扣信号。
信号检测采用罗戈夫斯基线圈,罗戈夫斯基线圈具有正比于电流导数的输出,其动态线性范围大,特别适用于万能式断路器的信号检测,图8-110所示为罗戈夫斯基空心线圈的工作原理。
对于圆环空心线圈,任意形状截面线圈的近似计算公式为
e(t)≈μ0NA[dI1(t)/dt]
对于矩形截面线圈计算公式为
e(t)≈μ0Nwh/2πIn[(ra/ri)dI1(t)/dt]
式中 μ0——真空磁导率,μ0=4π×10-7H/m;
N——匝密度(匝/m);
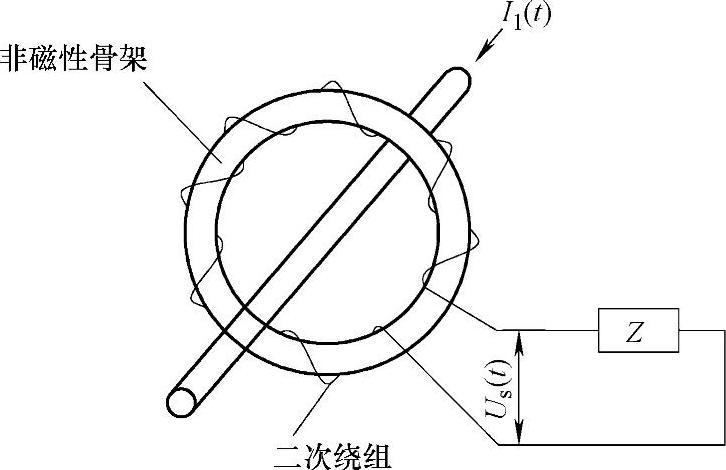
图8-110 罗戈夫斯基空心线圈的工作原理
A——单匝截面积(m2); 2ra——外径(m); 2ri——内径(m); h——高度(m); Nw——空心环的匝数; e(t)——低负载Rb->∞时空心线圈的输出电压。
对于含有谐波分量的电流测量:
式中 US——罗戈夫斯基线圈输出感应电动势;
K——罗戈夫斯基线圈常数,与线圈结构有关。

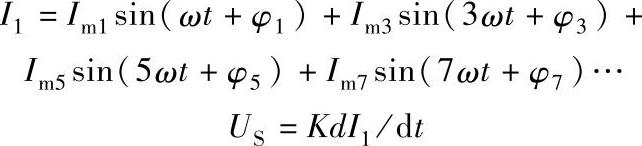
从上式可以看出,US得出的信号不能完全反映I1电流。当谐波电流较小时,可以认为US与I1成正比。考虑谐波影响时,US经过积分电路还原I1的波形,积分电路如图8-111所示。
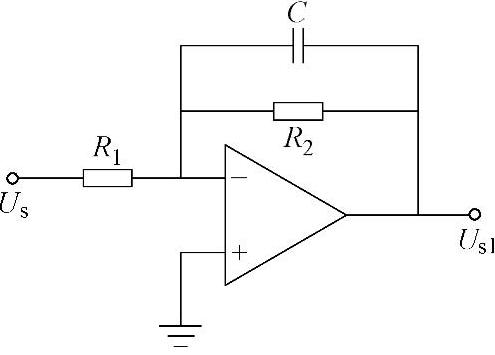
图8-111 积分电路
US/R1=-(US1/R2+CdUS1/dt)
如罗戈夫斯基线圈感应出I1的微分信号的谐波分量:
US=nKωImncos(nωt)
式中 n——谐波次数。
当R2为∞时
US1=KImnsin(nωt)/(CR1)
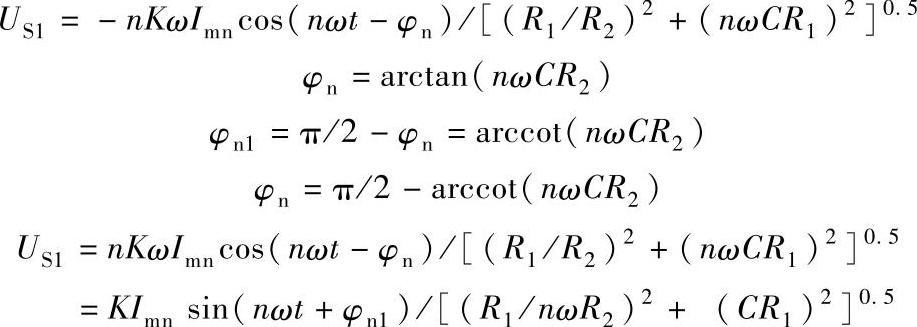
在设计应用中,为了保持运行的积分稳定,必须并联R2,如R2为无穷大时,这样带来各次谐波积分的相位误差为arccot(nωCR2)。
幅度误差=CR1/[(R1/nωR2)2+(CR1)2]0.5
在具体设计中,根据设计参数可以评估积分的误差。
(4)信号的放大电路 信号放大电路为了适应A-D转换的范围,如信号放大器输出电平为交流情况,应把输出交流电平转换成经整流后的直流电平或附加一个直流电平使正负的交流电平成为单相的带有交流分量的电平,其直流分量经CPU处理后滤掉。信号放大器的温漂和时漂带来的误差,通过CPU定时测量其直流漂移,滤去其误差。
由于信号的范围较大,同一输入信号应经过不同的放大倍数的信号放大器,输出的电平适应A-D转换器的电平范围,可以采取程控放大器来改变放大倍数,但程控放大器的切换放大量程受积分电路等的影响,在动态过程中是不稳定的。采用两种不同的放大器同时进入A-D转换,根据A-D转换的结果,来判断哪一个放大器信号是适用的,放大电路信号采用流程如图8-112所示,其程序流程如图8-113所示。
A-D转换的采样频率由所采样的波形最高谐波次数来决定,理论上采样频率要等于最高谐波频率的两倍,实际上由于采样点的不确定性,采到的波形(采样点)的幅值可能较小,带来较大的误差。实际上采用最高频率的4~8倍的采样点可使得在任何情况下的误差最小,但不能超过A-D转换器允许的最高频率。其分辨率一般为8~10位。目前许多CPU都集成了A-D转换电路,但其A-D转换电路和独立的A-D转换电路相比精度较差,如要满足高精度的A-D转换,应选用独立的A-D转换器。
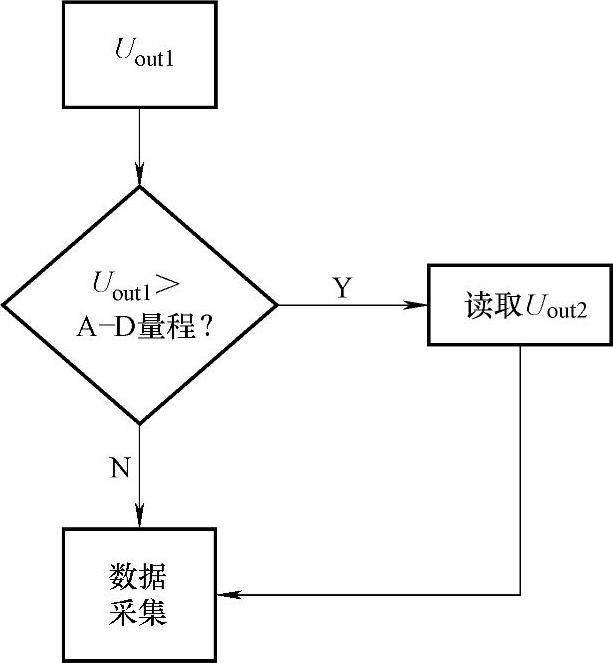
图8-112 放大电路信号采用流程
(5)微机控制 对于要完成控制器的功能而所使用的微机芯片可以有多种选择,主要是根据所完成的功能,如要完成基本功能、扩展功能、附加功能的控制器,其芯片的程序存储器至少要128KB,数据存储器为4KB,非挥发性数据存储器除了必要的初始化设定数据外,尚要记录历史数据,其存储器的容量由所记录的历史数据的多少来决定。计算机指令周期为0.05μs。如人机界面采用点阵式的LCD,显示器最好由独立的CPU控制。
为了程序能高速有效地执行,首先要对所完成的任务的实时性进行分析。在程序中最重要的任务是完成信号采集,然后根据所采集的数据进行各种处理,所以其实时性的分析以信号采集为基准。
信号采集主要是采集三相电流,同时采样三相电压、接地或漏电电流,一次采样至少要八个信号,其采样周期为
ts=T/n
式中 T——电源周期:
n——采样点数。
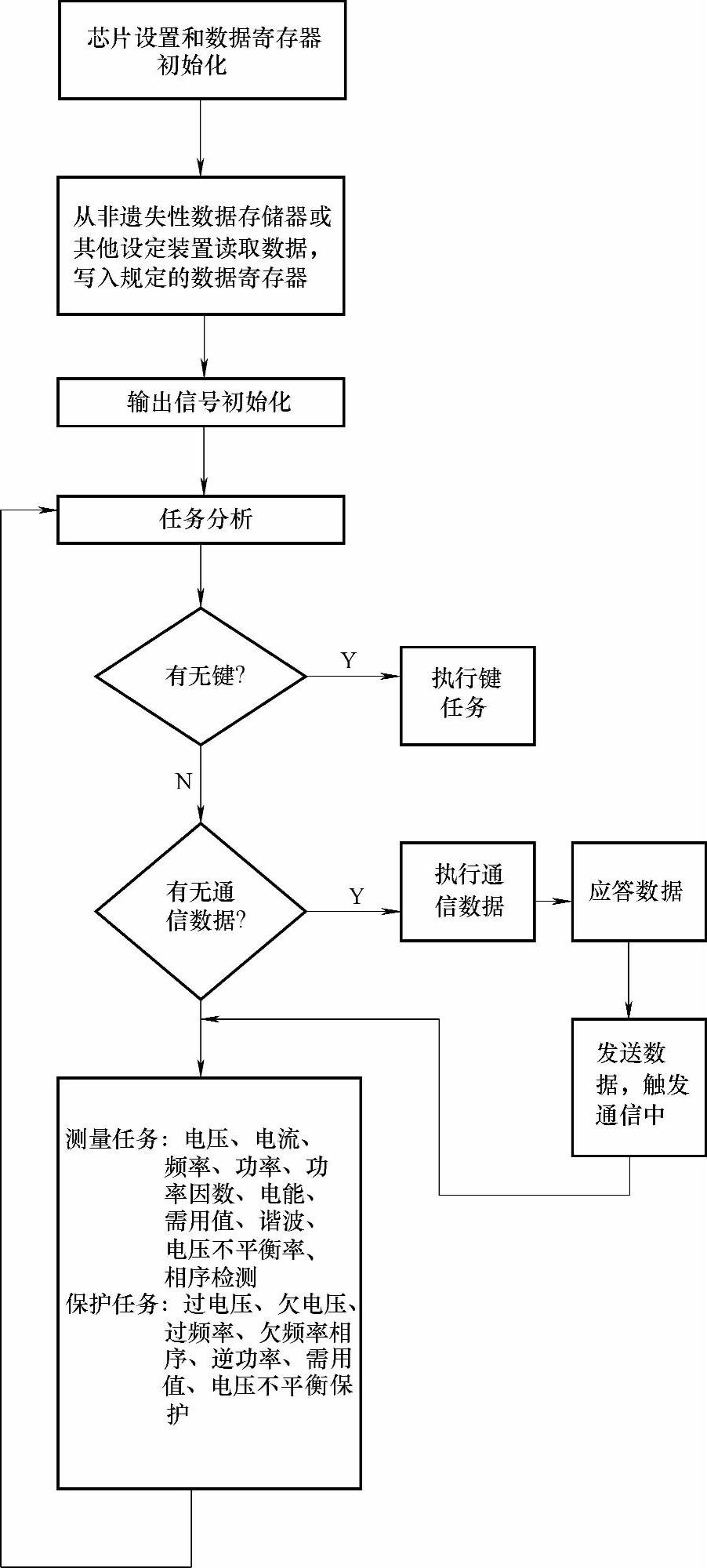
图8-113 程序流程
一般在全功能的控制器中,n至少为64点。
任务的实时性要求由不同等级的中断控制,其实时性分析见表8-55。
各任务应在规定的任务完成时间内完成,如某个任务超时,可能带来不可预料的结果。在主任务周期的任务都是实时性不高的任务或为中断服务任务准备数据或处理数据。
在主程序中,尚可实行同级任务的优先。首先建立一个任务优先表,当一个任务完成后(包括该任务经判断后不需要执行,也认为该任务完成),查询是否有更高级的优先任务程序,如有,执行更高级的任务,否则顺序进行。在一个主程序开始时,任务优先表全部置位,当执行完一个任务时,清除任务。在主程序执行过程中,任务优先表的内容往往是由中断服务程序填写的,程序本身不修改任务优先表。一般任务优先级表按每个任务执行时间的长短来排列,优先级按任务的迫切性来排列。图8-114所示为任务执行过程。
表8-55 中断实时性分析
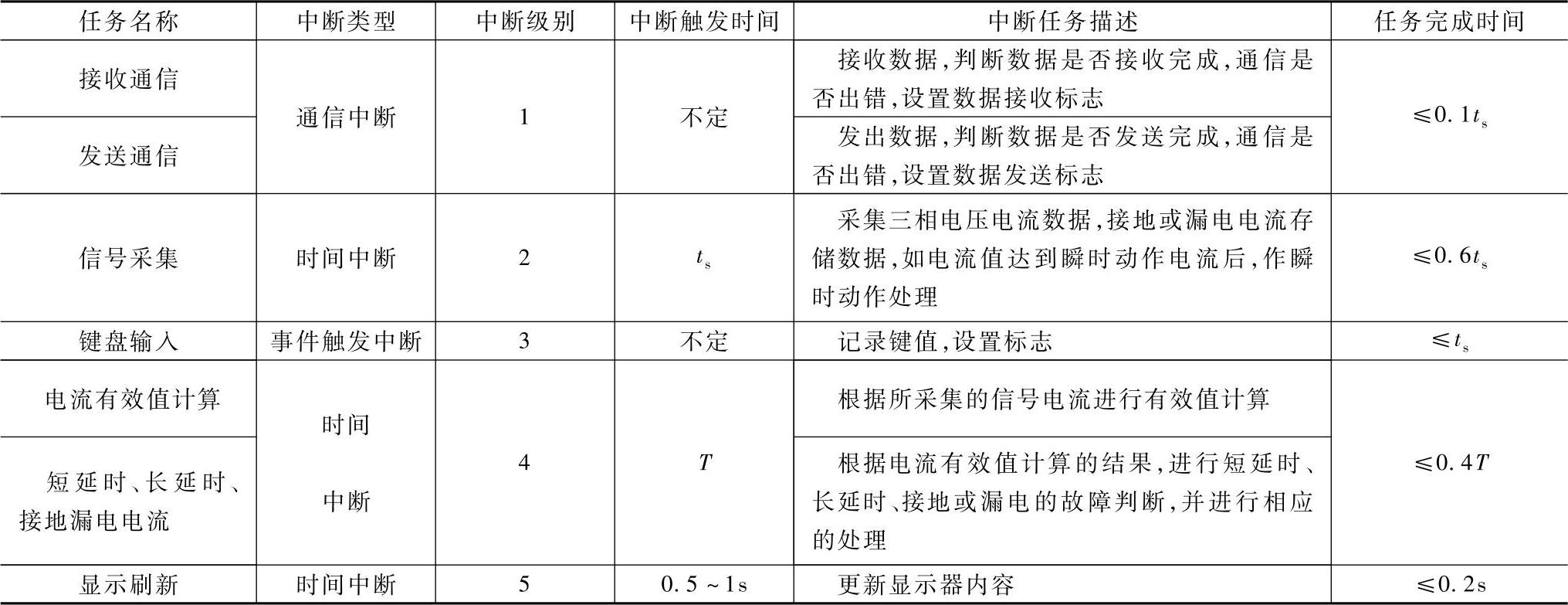
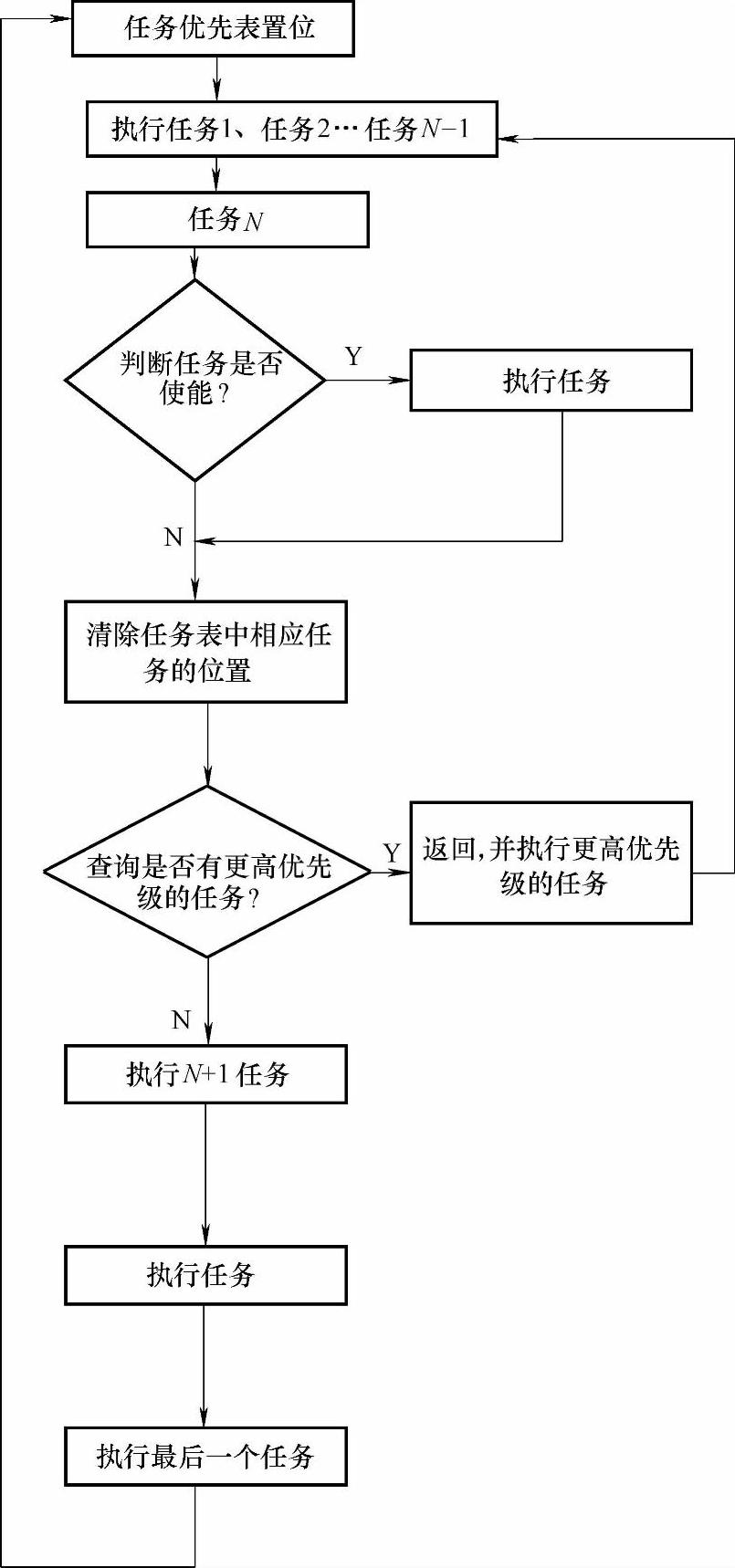
图8-114 任务执行过程
当程序初始化执行后,应检查执行程序是否正确,可以使用循环冗余校验(CRC)检查,保证执行程序的可靠,这个程序完成时间要在T~2T时间内完成,否则要延迟主程序的执行。用看门狗防止程序进入死循环,看门狗复位程序应在主程序中,不能在中断服务程序中。当控制器上电后,如看门狗动作复位或因其他原因复位(非断电以后重新复位),为了使程序正常运行,应不能改变数据寄存器里的内容,复位执行后热启动过程的流程图如图8-115所示。
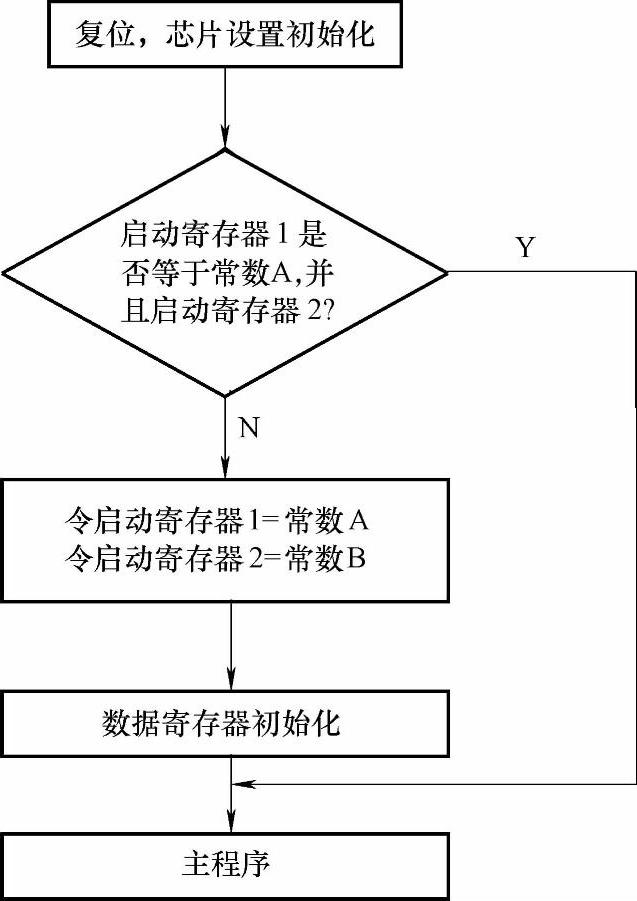
图8-115 热启动过程的流程
(6)信号输出 信号输出主要由脱扣器执行机构和继电器、光耦合器、晶体管等构成。
执行机构为一个磁通变换器作为机械输出装置直接驱动断路器的脱扣装置,其可靠性要求最高。脱扣执行器由永久磁铁,线圈、顶杆、弹簧、磁路组成,其结构如图8-116所示。

图8-116 脱扣执行器结构
其工作原理是:在正常位置时,顶杆克服弹簧力由永久磁铁保持住,当线圈通以脱扣信号时,反向对永久磁铁去磁,顶杆在弹簧力的作用下,驱动断路器的脱扣装置,使断路器分断故障电流。
对脱扣执行器的主要技术要求:
1)顶杆行程撞击力。由断路器机构提出要求。
2)保持力。由于在断路器分合闸操作时会产生振动和撞击力,在这种情况下,脱扣器执行机构不能有误动值,这个值由断路器提出。
3)动作时间。当装置接收到脱扣信号后至顶杆全部顶出,一般要求在2ms之内完成。
4)脱扣电流。驱动脱扣执行器所需要的最小电流,在脱扣过程中,为了减少脱扣执行器的动作时间,需要足够的脱扣电流(如满足2ms之内所施加的电流,此电流往往大于驱动脱扣执行器所需要的最小电流)。
5)脱扣信号持续时间。通以脱扣电流,使脱扣执行器可靠动作的最小时间。
由于脱扣电流较大,控制元件的电源提供脱扣电流有一定的时间限制,如果超过这个时间限制使电源电压下降,致使CPU和其他电子回路不能正常工作,故要求脱扣电流和可靠动作的脱扣信号持续时间不能超过控制器电源所规定的限制。
为了保证脱扣执行装置可靠动作,脱扣信号是以脉冲形式驱动脱扣执行装置,脱扣信号脉冲宽度要大于1.5倍的脱扣信号持续时间,也可以用多个间隔脉冲发送。当电源不能满足上述要求以致使电子电路不能正常工作,脱扣执行机构和控制器电源都要做相应的改进。
具有继电器、光耦合器、晶体管三种输出。上述的输出信号由CPU的程序控制,主要是考虑控制器的电源允许的输出能力。当有多个信号输出时,应根据同一时间最多的输出信号来考虑控制电源的能力设计,如不能满足这个要求时,输出应采取节能的方式,如继电器采用串联电阻减少维持电流,光耦合器选用高灵敏度的器件。输出装置应注明驱动能力和工作电压。
(7)人机界面 具有基本功能的控制器其输入信号用编码开关来设定控制器的参数,其输出信号采用液晶显示器(LCD)、发光二极管(LED)。具有全功能的控制器的输入采用键盘,输出采用LCD点阵式显示器,由于控制器工作的微环境温度较高,所以选用的显示器温度等级应考虑微观环境温度。智能控制器的面板如图8-117所示,采用中文图文,液晶显示,直观易懂,操作方便。
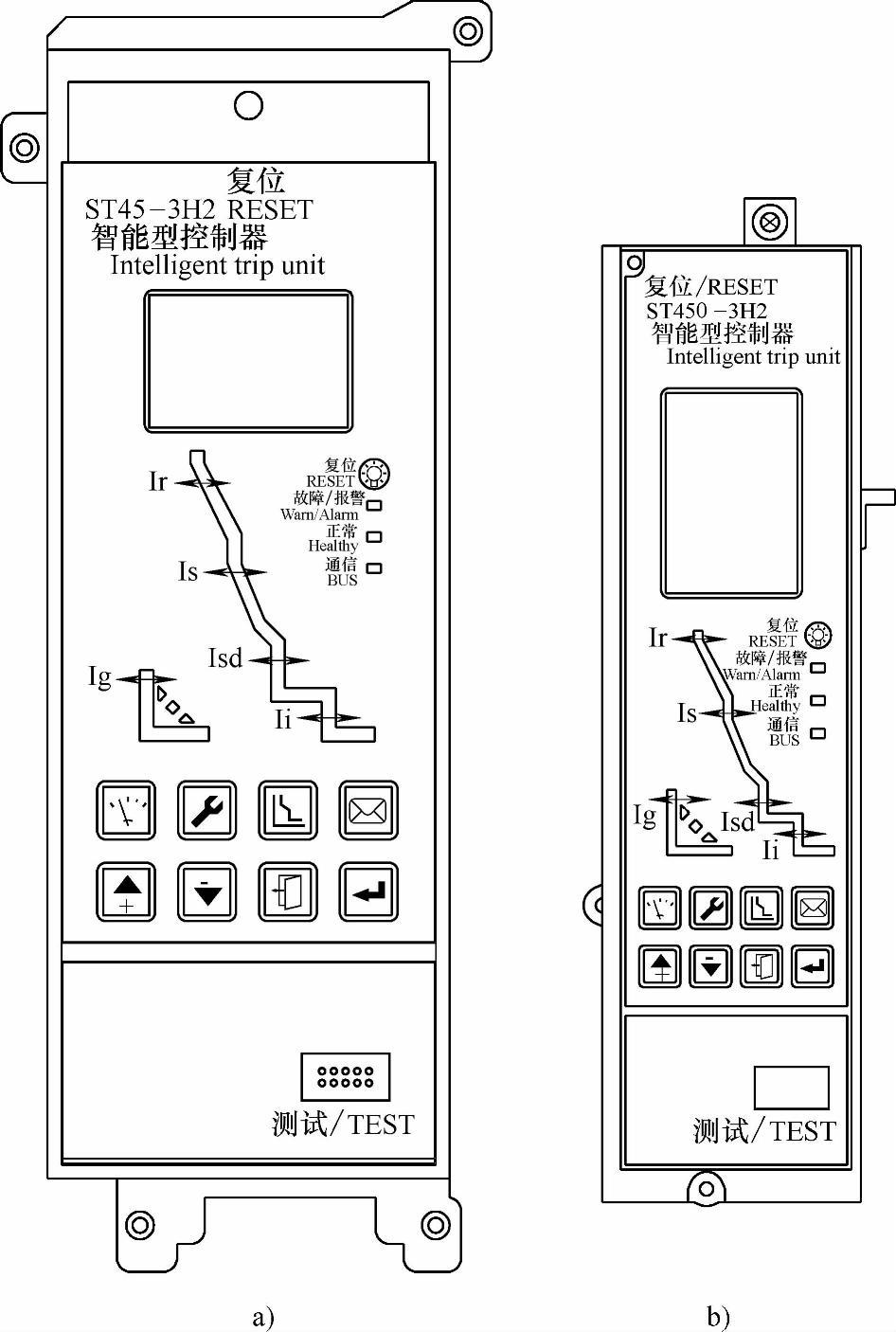
图8-117 智能控制器的面板
a)DW45 b)DW450
2.可通信智能控制器
智能控制器进一步发展可成为可通信产品。
目前智能控制器主要通过现场总线进行通信。通过In-ternet通信的控制器在进一步的发展中。
控制器采用的现场总线主要有Modbus、Profibus、Devi-ceNet,通过现场总线可以对控制器进行四遥功能(遥控,遥测,遥调,遥信)。控制器可通过网关实行现场总线的转换,目前的网关主要是Modbus对Profibus、Modbus对Devi-ceNet。可通信智能控制器是组成通信网络的重要部件,通过通信网络可对系统进行控制调节,改善系统功能。
(1)通信功能硬件驱动 控制器通过协议驱动芯片或者驱动芯片进行通信。Profibus采用的协议芯片为SPC3,由于SPC3集成了Profibus规约,所以对协议的解释都由SPC3完成。控制器只要根据SPC3的结果来处理,不必关心Profi-bus的具体协议,简化了控制器的程序编制。DeviceNet采用了CAN驱动器,Modbus采用了RS485驱动器,这两种驱动器不包括协议,仅是物理上的转换。控制器的程序应包括上述两种协议的程序。
(2)通信功能的程序设计 如前所述,通信功能的中断优先级最高,由于可通信控制器在组网的过程中,可能使用到最高的通信速率,所以控制器的优先级定为最高级,同时通信中断功能的中断服务程序执行时间要求很短才能不影响控制器的正常工作。所以每种总线的中断服务程序编写要求精简高效,甚至可以用汇编语言来编写,在规定的中断服务程序内完成。
1)对Device Net和Modbus的程序设计要求的内容应包括:
①输入数据的协议规则检查。
②输入数据和控制器数据交换的索引程序。
③控制器数据和输出数据交换的索引程序。
④将数据转换成符合协议规定的数据报文。
⑤错误报文处理。
由于驱动芯片不包括协议的解释,当接收数据后,要检查输入信号是否符合协议要求。当输入数据错误时,进入错误报文处理程序,当输入数据有效时,进行报文处理,如要应答的话,发送应答报文。
2)对Profibus的程序设计要求的内容应包括:
①输入数据和控制器数据交换的索引程序。
②控制器数据和输出数据交换的索引程序。
③错误报文处理。
由于SPC3集成了Profibus规约,已包含了对协议的解释。
(3)应用范例 可通信断路器装进开关柜中成为可通信配电成套装置。图8-118所示为可通信开关柜内断路器通信线之间的连接示意图,支持Modbus协议。通信线有三种规格,其中:①用于断路器之间的连接;②用于断路器至连接座之间的连接;③用于连接座之间的连接。其通信连接示意图如图8-119所示。主站通过RS485连接,可实现四遥功能,即遥测、遥控、遥信、遥调,其子站通信地址和波特率可通过编程器设定。主站和子站都具有光耦合装置,可用于高电气干扰环境,通信响应时间为0.2s(典型值),断路器可采用ST-2H型控制器。
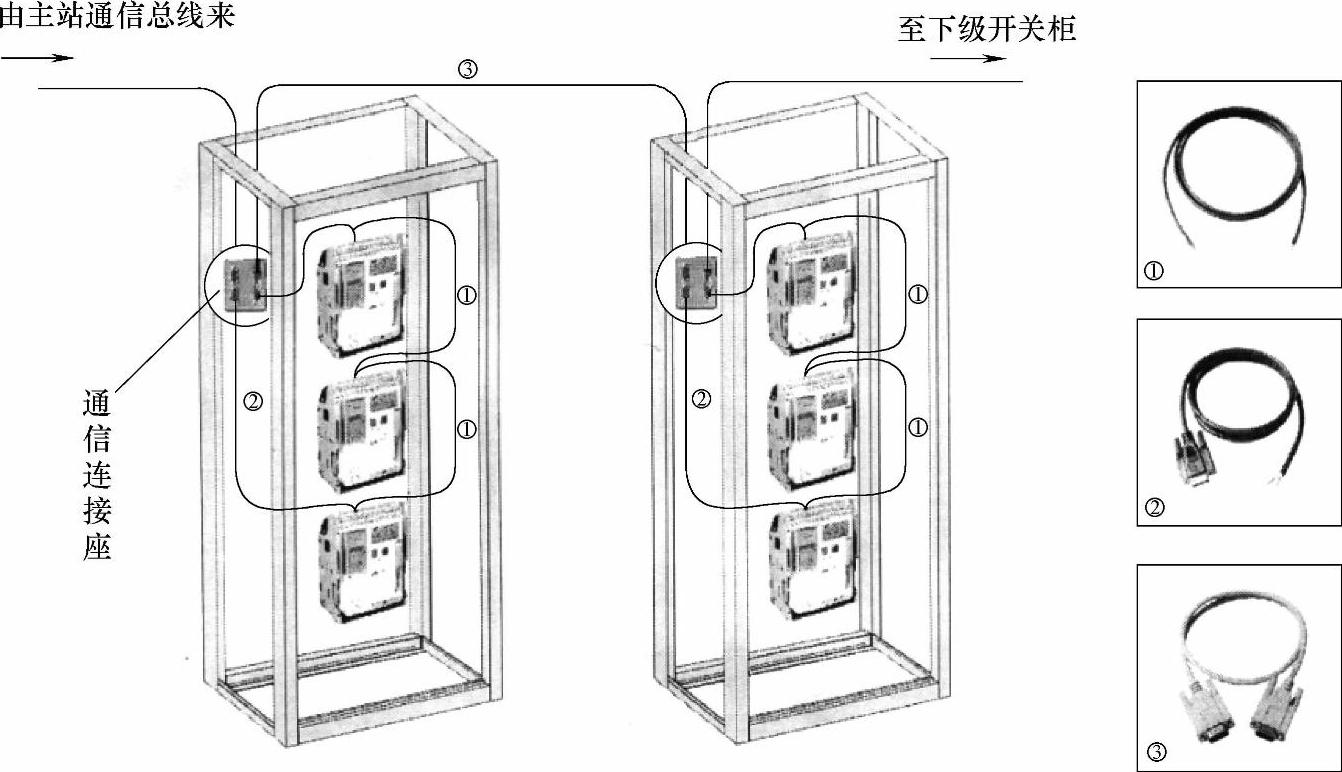
图8-118 可通信开关柜内断路器通信线之间的连接示意图
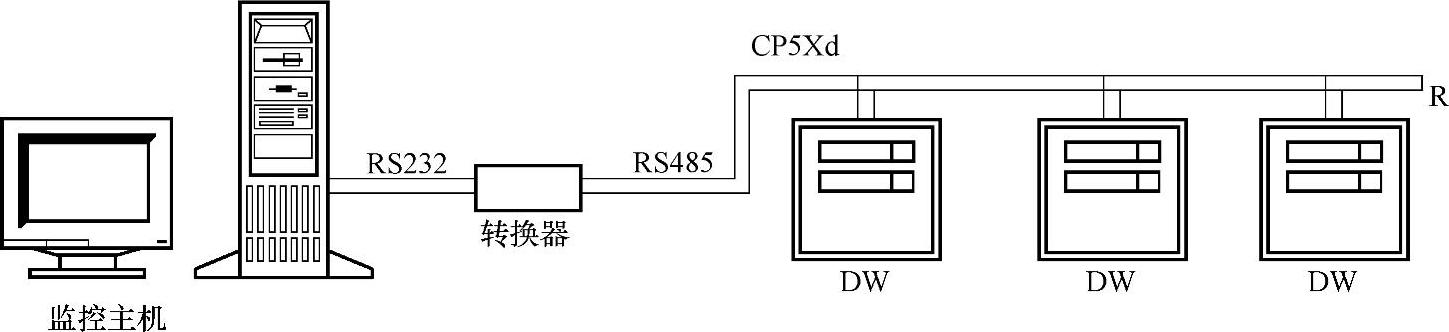
图8-119 Modbus协议通信连接示意图
如需采用Profibus协议,则按图8-120连接。图中ST-DP为Profibus通信协议模块。主站卡为Siemens公司的CP5X11,RT为网络终端电阻(一般为150Ω)。
如需采用DeviceNet协议,则按图8-121连接,图中ST-DN为DeviceNet通信协议模块。主站卡为SST公司的5136-DNP-PCI,RT为网络终端电阻(一般为121Ω)。5条引出线依次为:①屏蔽层;②24V电源线(+);③CANH;④CANL;⑤24V电源线(-)。注:DeviceNet协议为CAN的数据连路层和物理层。
Modbus协议最长通信距离为1200m,一条双绞线最多可连接32台断路器。Profibus协议为500~1000m,视波特率而定。DeviceNet协议为100m。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。