



1.影响断路器分断速度的主要因素
提高分断能力及其使用寿命一直是低压断路器研究的一个重点内容,可以通过改进灭弧室结构提高灭弧能力、优化与改进操作机构和缩短触头弹跳时间等方法来达到提高分断性能的目的。在分断过程中,触头的分断速度主要影响电弧电压的上升速度、电弧停滞时间和电弧进入栅片的快慢。因此,以提高主轴的平均角速度为目的,进行机构的优化设计,对提高断路器开断性能有重要影响。在对机构优化前,先来分析一些影响断路器操作机构分断速度的主要因素,它们是分断弹簧的刚度和杆件形状。
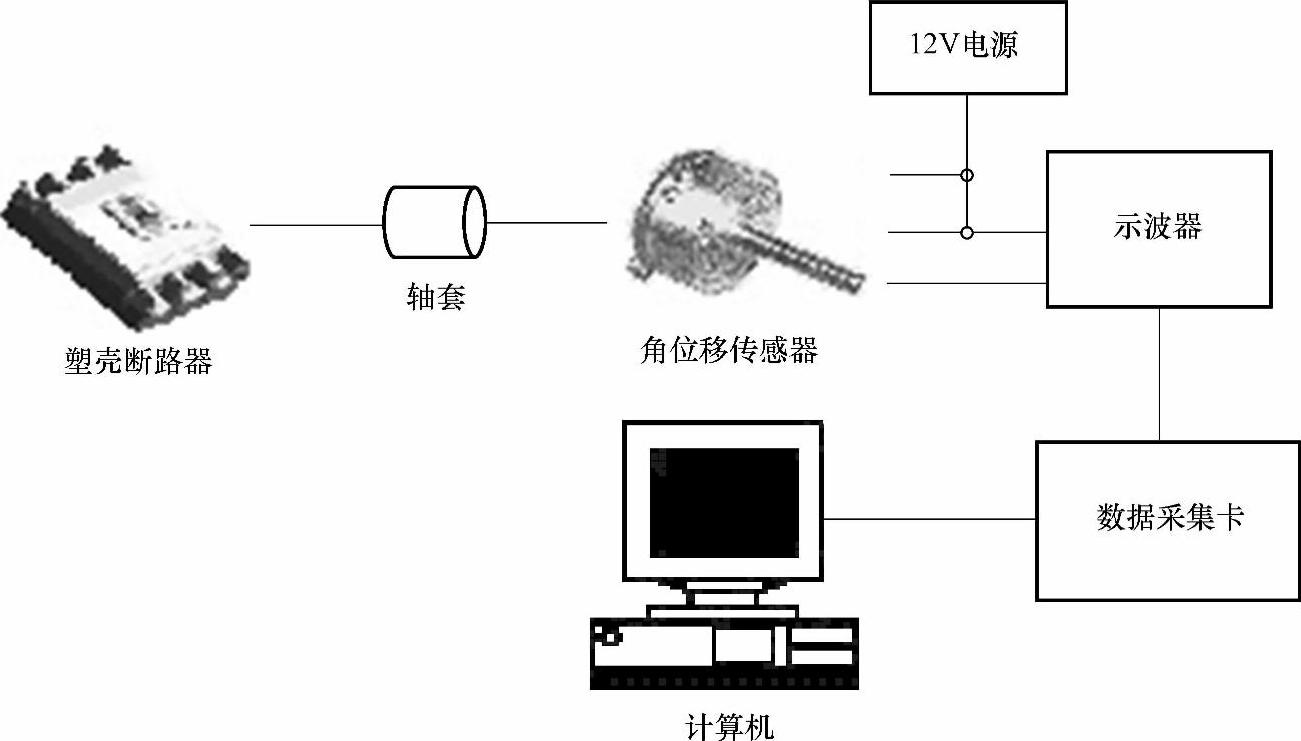
图6-22 测量角位移的试验线路
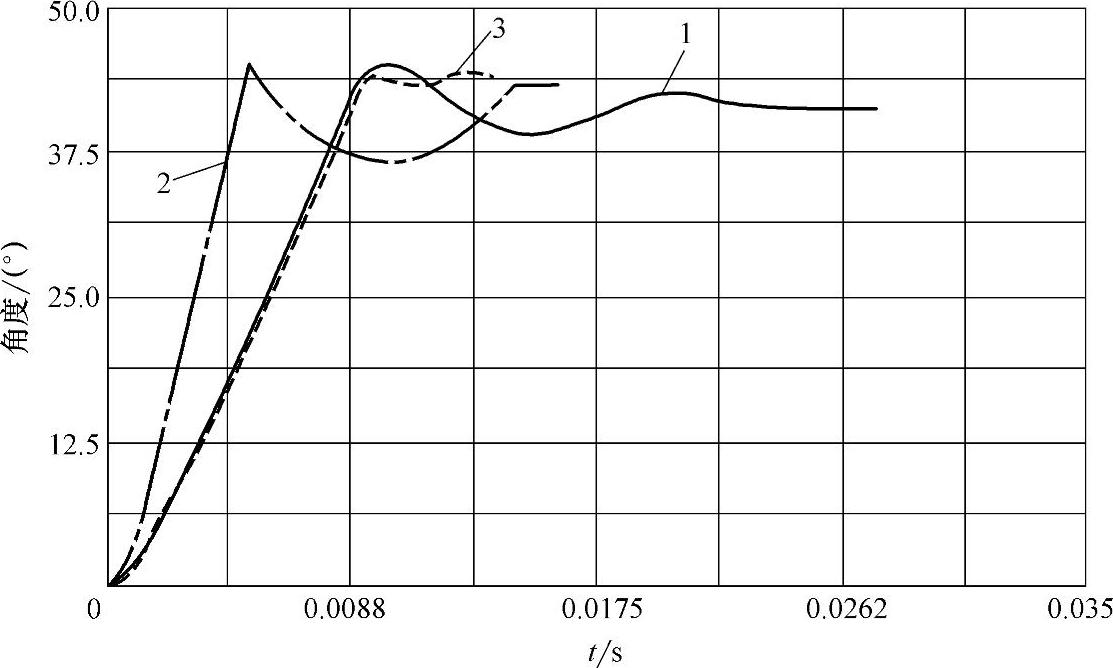
图6-23 手动分断过程中仿真与实测曲线的对比
1—实测曲线 2—不考虑摩擦力的仿真曲线 3—考虑主轴摩擦力后的仿真曲线
增大主弹簧的刚度系数可以提高断路器的分断速度。图6-24和图6-25分别为分断弹簧不同刚度系数下的主轴角位移和角速度随时间的变化曲线,曲线1到曲线3刚度系数分别为17.5N/mm、27.5N/mm、37.5N/mm,主轴转到最大角度所用时间分别约为10.7ms、9ms、8ms。可见,增大弹簧刚度可提高触头打开速度,但手动分合闸所需的力也会随弹簧刚度增大而增加。仿真表明,在系数为17.5N/mm时,所需的闭合力为30N左右,在37.5N/mm时,闭合力为60N左右。可见,主弹簧刚度系数的提高能增大机构的开断速度,但同时增加了手动分合闸所需操作力,因而弹簧刚度的增加受到断路器手动操作力增大的约束。
在参数化分析过程中,Adams/View采用不同的设计参数值,自动地运行一系列的仿真分析,然后返回分析结果。通过对结果的分析,可以研究一个或多个参数变化对样机性能的影响。获得最危险的操作工况以及最优化的样机。类似于实际物理样机的设计、试验和优化过程,Adams提供了参数化分析方法——设计研究,是在特定范围内对某个设计变量设置不同的若干值,进行一系列的自动仿真分析,各次的分析结果以报告形式列出,通过设计研究结果可知:
1)在设计变量变化过程中虚拟样机性能的变化情况;
2)在给定分析范围内找到设计变量的最佳参数值;
3)设计变量对虚拟样机性能的近似敏感度。敏感度是前后两次试验中设计敏感度的平均值,该值可以表示为Si:

式中 O——目标值;
V——设计变量的数值;
i——迭代次数。
可以通过敏感度值了解某个参数在变化时对目标函数的影响程度。敏感度为正值,表示目标值在迭代过程中逐渐增大,反之亦然。
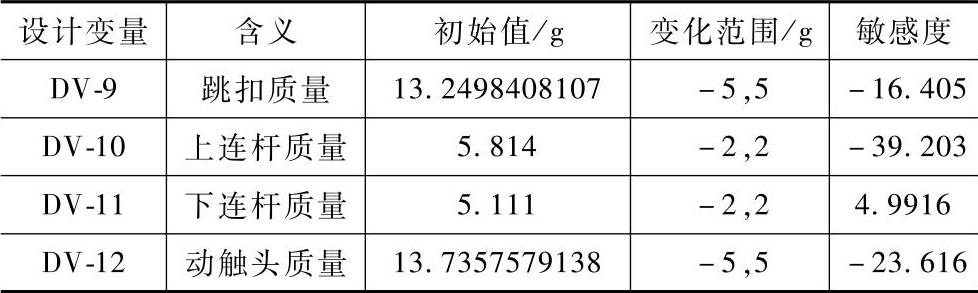
在Adams中,刚体的运动状态是根据构件质心在计算坐标系的位置,采用修正的Newton-Raphson迭代算法迅速分析求解。虽然不同型号的低压断路器操作机构的原理相同,但是杆件形状却有很大不同。图6-26是直角坐标系下的塑壳断路器机构模型,触头支架旋转轴O1作为主轴是直角坐标系原点,轴A、轴B、轴C和轴O2是操作机构关键轴。改变杆件形状相当于改变杆件的质心位置和质量,因此,将跳扣k,上连杆h,下连杆g,触头的质量和质心X、Y坐标设为变量,进行设计研究,研究它们对主轴分断角速度的影响。表6-8为杆件质量的设计研究结果,表6-9为杆件质心位置的设计研究结果。
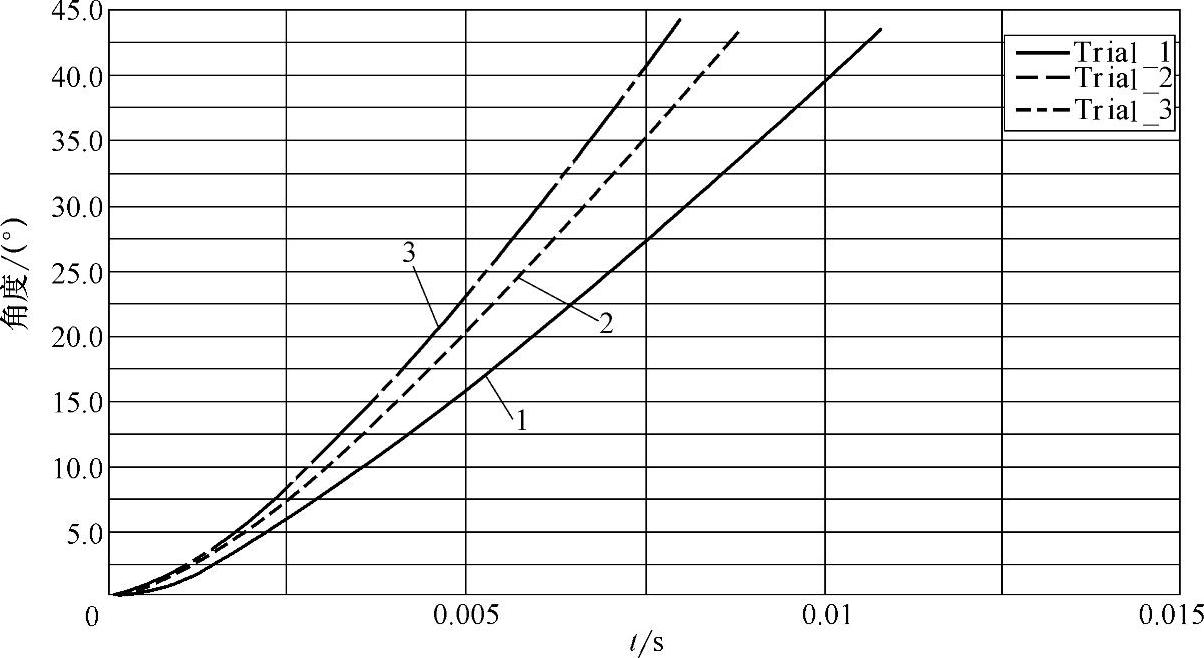
图6-24 不同弹簧刚度系数操作机构主轴角位移随时间的变化曲线
1—17.5N/mm 2—27.5N/mm 3—37.5N/mm
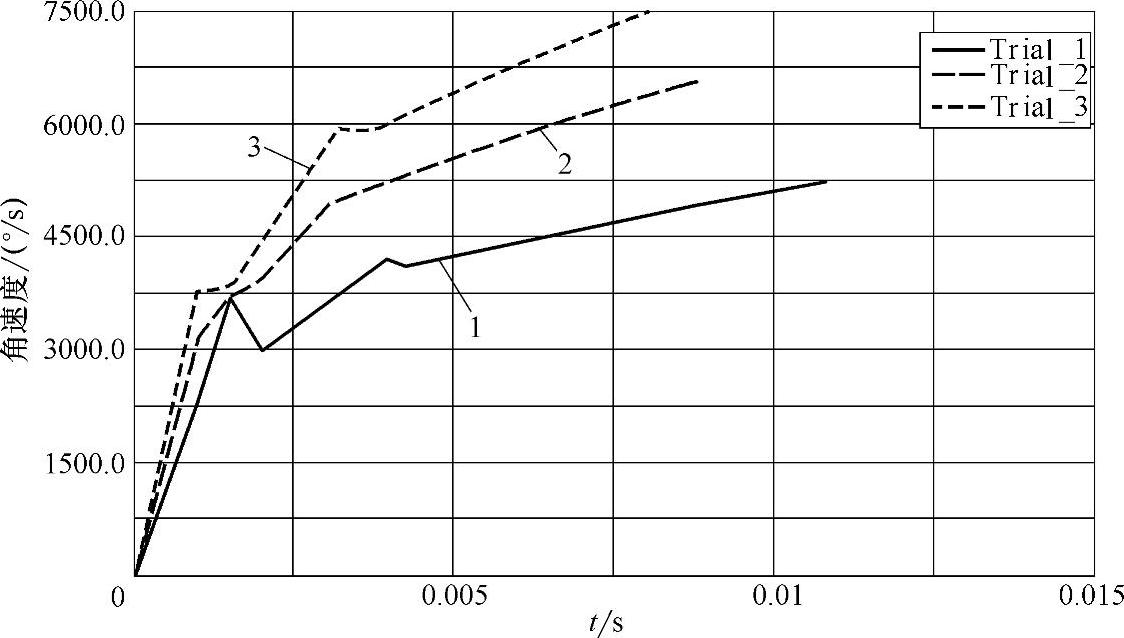
图6-25 不同分断弹簧刚度系数操作机构主轴角速度随时间的变化曲线
1—17.5N/mm 2—27.5N/mm 3—37.5N/mm
表6-8 杆件质量设计研究结果
从表6-9中可以看出:(https://www.xing528.com)
1)跳扣的质心位置X坐标对触头主轴平均角速度影响最大,它的质心X坐标离图6-26中的O1轴(坐标原点)越远,角速度越大,在设计时,应在不影响机构运动的情况下,通过改变它的形状使质心位置尽量远离触头主轴中心点O1,它的质量也有较大影响。
2)上连杆的质量影响最大,质心Y坐标也有较大影响,应注意采取适当措施,减轻其质量。
3)动触头质心的坐标和质量也有一定影响,不能忽视。
4)下连杆质心位置和质量影响最小。
2.以关键轴的位置作为设计变量的操作机构优化设计
优化设计是Adams提供的一种复杂的分析工具。优化分析问题可归结为:在满足各种设计条件和在指定的变量变化范围内,通过自动地选择设计变量,由分析程序求取目标函数的最大值或最小值。优化的目标函数是一个数值表达式,可以表示质量、效率、总材料成本、运行时间和所需的能量等。可以选择在优化分析中是求取最大值还是最小值。设计变量可以是构件的质量、几何尺寸和力的大小等。优化分析中的约束是有条件的,这些边界条件能够直接或间接地消除无法接受的计算结果。
Adams软件内嵌的优化算法有DOT优化算法,OPTDES算法,这些算法已得到了世界范围内的广泛认可,对用户而言,进行优化设计只需要确定收敛容差和最大迭代次数即可。此外,用户还可自己编写优化算法嵌入到Adams中。本书对断路器机构优化设计所选用的优化算法是OPTDES-GRG(Generalized Reduced Gradient)算法。
以图6-26中的触头主轴O1为参考点,操作机构关键轴A、B、C、O2的中心X,Y坐标为设计变量,进行设计研究。设置设计变量的变化范围见表6-10,观察每个变量对平均分断角速度的影响。
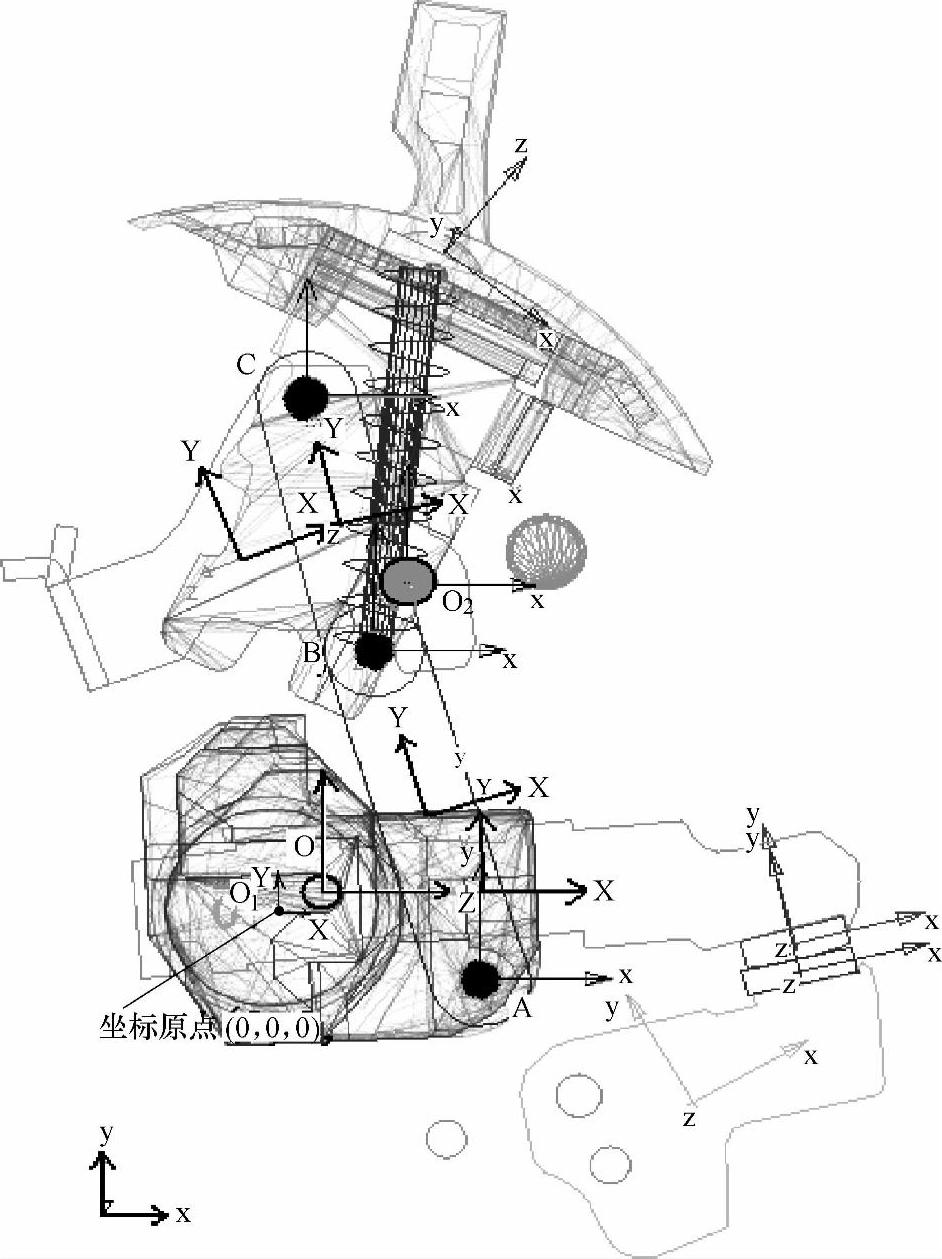
图6-26 直角坐标系下的塑壳断路器机构模型
表6-9 杆件质心位置设计研究结果
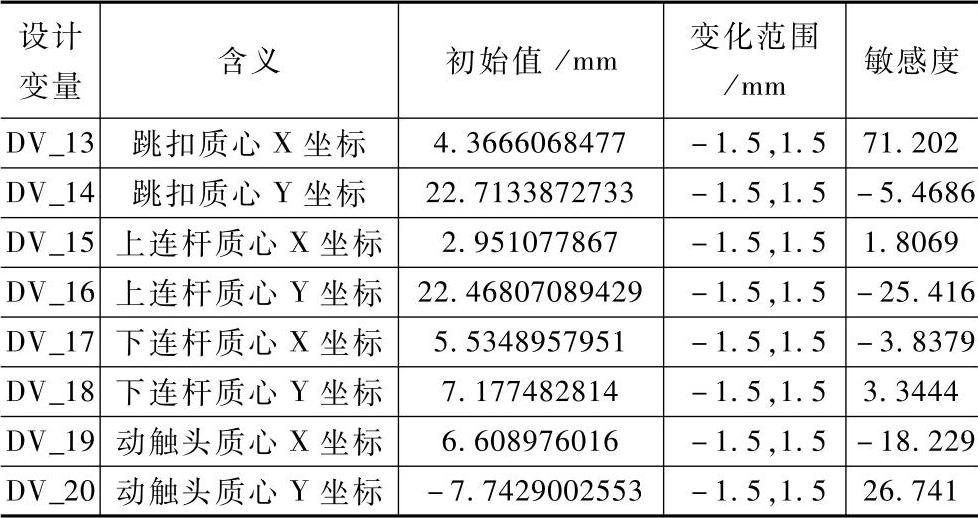
表6-10 轴的位置设计研究结果
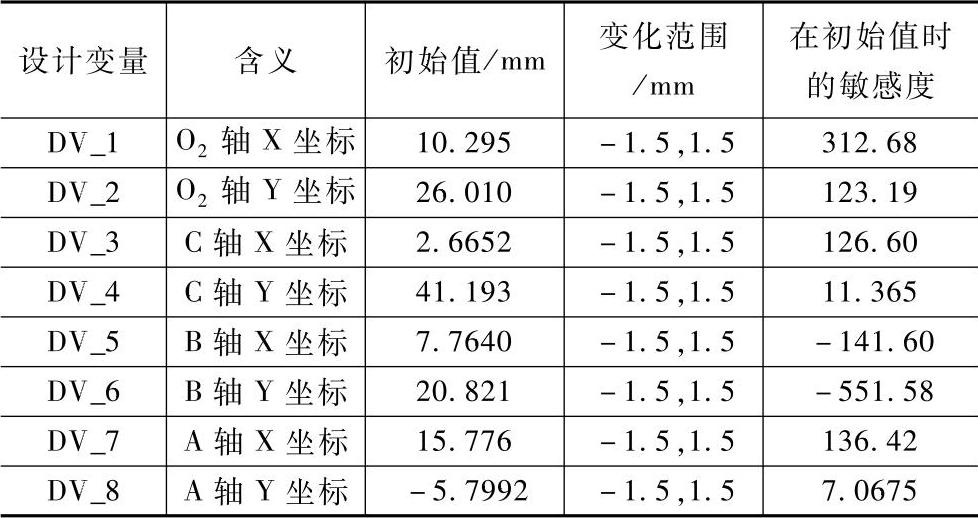
以轴O2的X坐标变化为例,在表6-10变化范围内,当轴O2离坐标原点O1最近时,触头转轴达到最大角度所需时间为10.73ms,当其离坐标原点O1最远时,到达触头主轴最大角度所需时间为8.89ms。
从表6-11中可以看出,变量DV_1、DV_3、DV_6、DV_7的敏感度相对较大,即轴O2、C、A中心的X轴坐标和轴B中心的Y轴坐标对分断过程中动触头主轴平均角速度影响较大。这一结论为进一步优化设计奠定了基础。
以触头主轴的平均角速度最大为目标函数,设计变量在指定的范围内变化。在优化过程中,Adams自动调整设计变量,以获得最佳目标函数值。表6-11为考虑DV_1、DV_3、DV_6、DV_7四个变量时机构的优化分析结果。
表6-11 优化设计结果
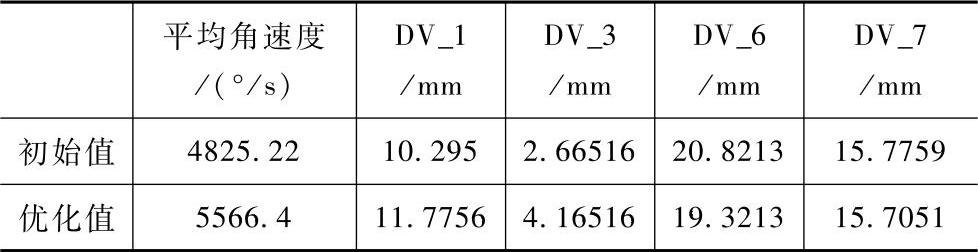
从表6-11可以看出,在考虑四个变量同时变化的情况下,经过优化设计的迭代运算,找到每个变量的最优点,使动触头主轴的运动速度从4825.22°/s提高到5566.4°/s,所用时间由9ms缩短到7.753ms,并能自动生成新的样机模型。在分断过程中,优化前后的动触头主轴角速度随时间变化的曲线如图6-27所示,1是优化前的角速度曲线,2是优化后的角速度曲线。
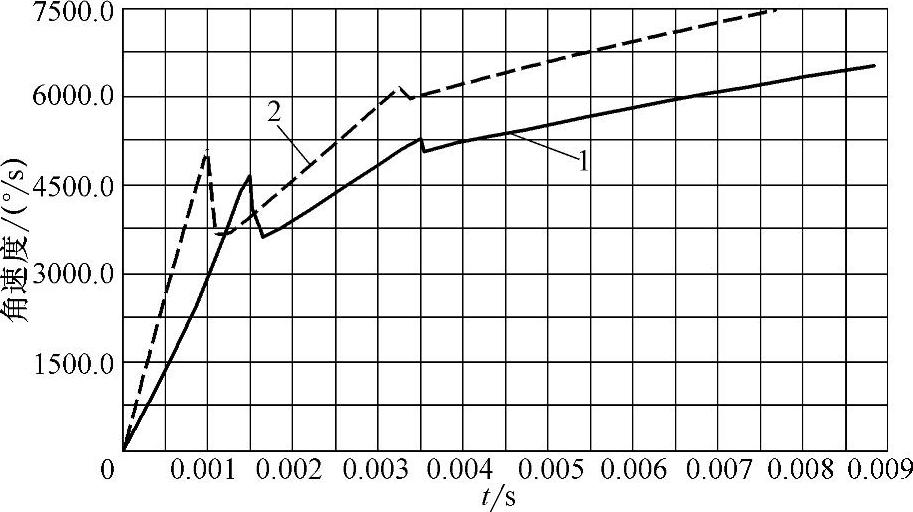
图6-27 优化前后的动触头主轴角速度变化
1—优化前 2—优化后
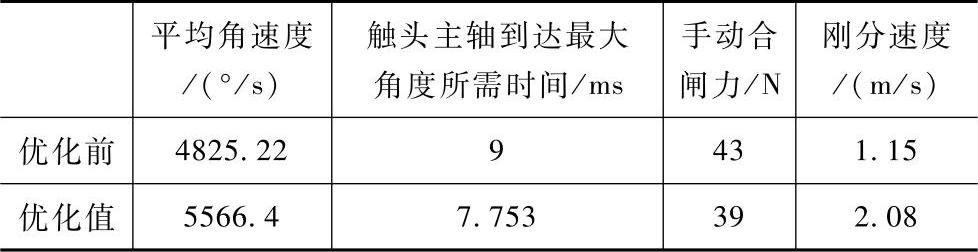
表6-12是优化前后一些仿真结果对比情况,仿真研究表明,一般需在手柄施加43N的力才能使该型号塑壳断路器合闸,机构优化后最小合闸力减小到39N,刚分速度由原来的1.15m/s提高到2.08m/s,说明了优化结果是合理可取的。
表6-12 优化前后结果对比
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。