



4.15.5.1 为什么需要时间同步
当前智能的电气设备已经相当普及,现在的框架断路器、塑壳断路器、电能仪表、电动机保护器可能每个设备内部都具有嵌入式微处理芯片,在设备内部设置一个时钟,按照逻辑条件或时间条件实现要求的控制和记录现场发生的事件并不是难事。但是每个设备单独地计时,无论它的时间基准多么准确,它的准确度总有一定的限制,随着时间进程微小的误差会不断累积,使各个设备间的时间基准出现明显的偏离。而现在这些设备是处于互相关联的系统中,需要按照同一个时间基准运行,这就需要使分散在各设备内的时钟能够同步运行。通过对时,也就是用一个系统的参考时间(假设参考时钟运行的准确度足够的高、足够稳定)去校正系统内的所有时钟,而且可以定时执行这个校时动作,使得两次校时间隔内各时钟可能产生的累计偏差不会大于系统的允许值。这样系统内所有时钟就能始终保持一定的同步准确度。在要求的同步的设备很多又很分散时,通过网络通信自动实现系统内各设备的时间同步就非常重要,现在的网络技术,特别是以太网的普及为通过网络实现高准确度时间同步提供了可能。
4.15.5.2 网络时间同步协议
实现秒级准确度的时间同步是不困难的,只要在参考时钟定时向各节点发布基准时间报文即可,报文在网络上的传输时间,到从时钟接收报文,再校正时间,一般能够达到这个要求。但是如果将同步准确度再提高一个量级,那么网络传输的延迟,从时钟接收和解析时间报文和校正所用的时间就会对准确度产生显著的影响。如果还需要更高的准确度那么对于传输机制,时间报文的结构和测量方法就要做很多研究和改进。
实际上对于时间同步的需求始终是非常迫切的,例如在继电保护、低压配电开关中可以记录故障录波数据,但是在一个配电网络中同一个事件中多个设备记录的数据需要相同的时间基准才能相互对照,对于正确分析电路故障需要的时间准确度应当是毫秒级,对工频交流电路电流、电压相位的测量需要微秒级的时间基准,因为50Hz工频系统时,每一度电角度等于时间轴上55μs时间,这种应用需要很高的时间准确度。因此,在电力设备中引入高准确度时间同步功能已是发展的趋势,如变电站自动化标准IEC61850标准中需要IEC61588高准确度时间同步技术,在继电保护设备中也在逐步采用高准确度的时间基准,用于电力系统远程测量的相量测量单元(PMU)更加是基于高准确度时间基准的测量装置。
在技术发展历史上NTP(网络时间同步协议)是由美国特拉瓦大学David L.Mills教授在1984~1992年的研究成果,并成为英特网的时间协议(RFC958、RFC1059、RFC1119、RFC1305、RFC2030、RFC4330)至今仍被普遍采用。经过持续不断的改进NTP可以实现1~50ms的同步准确度,它的准确度与网络条件很有关系(结构、传播范围、经过的路由数、通信负载),要达到毫秒级准确度已不太容易。在2002年出现的IEEE 1588标准(网络化测量和控制系统的精确时钟同步协议,通常称为Precision Time Protocol[PTP])在这方面取得了重大进展。使用这个方法并不需要很多资源就可以达到100ns级的同步准确度。IEEE 1588标准出现后得到业界高度重视,在2002年、2004年举办专业会议,2006年将举办第三次专业会议。工业控制的领先厂商Rockwell,Siemens等立即投入产品开发,IEC已将它转化为IEC61588:2004标准,该标准已为Ethernet/IP、Profinet、PowerLink、EtherCAT等基于以太网的总线采用,成为当前普遍采用的方法。
(1)IEEE 1588(IEC 61588)用于网络测量和控制系统的高准确度时间同步协议 IEEE 1588标准,规定了将分散在测量和控制系统内的分离节点上独立运行的时钟,通过交换时间报文同步到一个高准确度和稳定性时钟的协议。这些时钟是在一个通信网络(主要是Internet)中互相通信的。按这个基本格式,这个协议要形成树形的管理,使系统内的这些时钟产生一个主从关系。在一个给定子网中包括多个节点,每一个节点都有一个时钟。时钟之间经由网络连接。
系统中的一个时钟可选为主时钟,由主时钟向从时钟发送同步报文,通过报文传递时钟信息。图4-228所示是一个配置的例子。
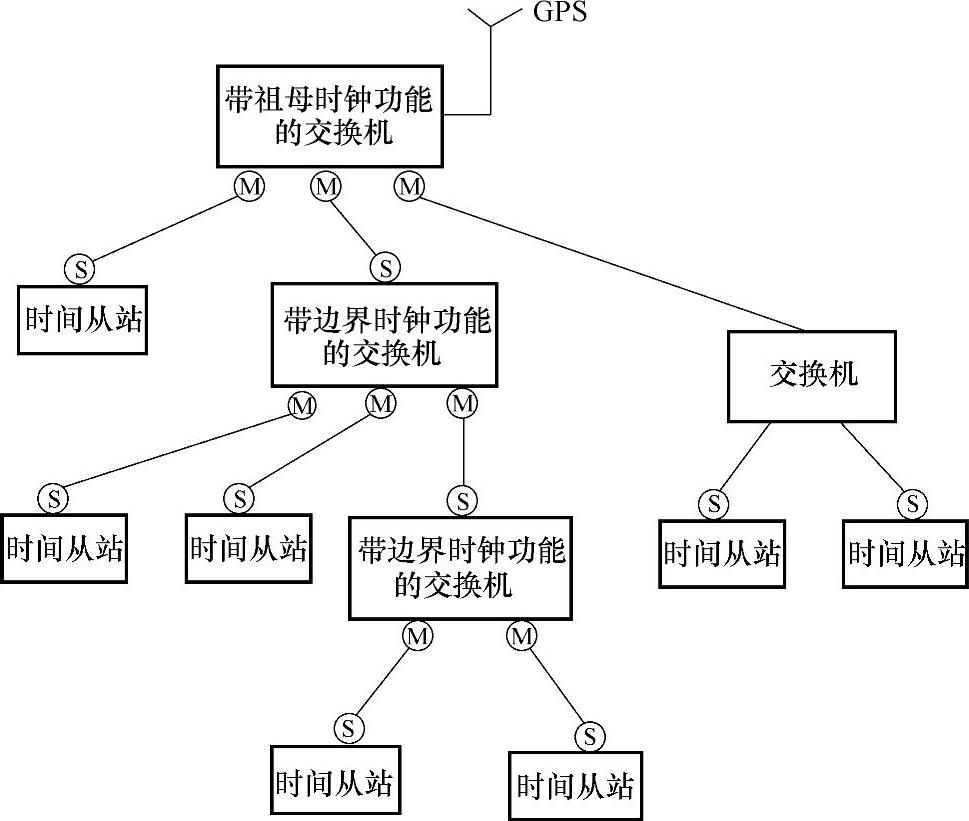
图4-228 带祖母时钟、边界时钟和从时钟的系统例子
 —时间主站
—时间主站  —时间从站
—时间从站
(2)PTP时钟的协议模型 图4-228所示是PTP子域的例子,最上面的是这个子域的祖母时钟,它是一个GPS(Global Positioning Satellite System是由美国国防部维持的系统,来自GPS的时间可以达到10~100ns的准确度范围)时钟,是这个子域的时间源,下面通过父子结构的时钟端口构成传递系统。这个结构的根是祖母时钟,这个结构的每一个分支点通常需要一个边界时钟。所谓边界时钟是它的内部保持一个时钟它可以通过从站端口同步到它的上代,同时它具有一个或多个主站端口可以向下传递时间基准。主时钟这点上从根进一步分支方向的所有时钟端口必须是主或父代端口,而有一个端口是同步到更加靠近根的时钟的从端口。分支到最后(不是根方向)的端口必定是从端口或不活动(Passive)端口(不活动端口的通信路径上,除非另外规定不应当发生报文)。
(3)PTP同步机制 IEEE1588定义了四种同步报文Sync、Follow_up、Delay_Request、Delay_Response,和一组管理报文(数据定义、报文格式等细节可参阅IEC61588标准)。为了简化问题,我们先考虑一个主时钟与一个从时钟的同步过程:
1)主节点每2s(同步报文的间隔是可设置的或自动设置的,这里假设为2s)向从节点发送一个“同步”(Sync)报文。这个报文是由主节点打上预计的发送时间标记的报文,但是由于预计的发送时间和实际的报文发送本身可能的延迟,实际时间标记不能随“同步”报文一起发送。这个“同步”报文在接收端被从节点打上接收时间标记(为了提高准确度,应在物理层或接近物理层的位置检测、记录和标识发送或接收时间)。IEEE 1588规范制定了可选件“硬件辅助”设计来实现这个准确度的提高。
2)第二步主节点向从节点发送一个“跟随”(Follow_up)报文,这个报文包含先前的同步报文准确的发送时间的标记。从节点利用这两个时间标记可以得到它与主节点的延迟,据此可调整它的时钟频率。
3)从节点向主节点发送“延时请求”(Delay_Request)报文(延时请求报文的间隔是独立设置的,一般应较同步报文间隔长),这个报文是由从节点记录它的准确发送时间,由主节点打上准确的接收时间标记。
4)主节点向从节点返回一个“延时响应”(Delay_Response)报文,这个报文带着先前的“延时请求”报文的准确的接收时间标记,从节点利用这个时间和由它所记录的准确的发送时间,可计算出主节点和从节点之间的传输延迟并调整它的时钟漂移误差。偏移的校正如图4-229所示,传输延时的测量如图4-230所示。
在IEC 61588和NTP时间协议中都使用64位二进制码表示时间,时间的起点是从1970年1月1日00∶00∶00秒开始(称为纪元时),前32位表示从这个时间起的累计秒数,后32位表示秒的分数,这样一个64位二进数就唯一地表示当前的时间。
在时间基准传递过程中网络的延时和延时的不确定性称为影响准确度的主要因素,但是1588协议设计的四个报文能够成功排除这些因素,如图4-229、图4-230所示。

图4-229 偏移的校正
1)假定开始时主时钟和从时钟的时间并未同步(如图4-229中TM1=1051时Ts可能为1001),在TM1从主时钟发出Sync报文,在从时钟接收到Sync报文时要通过特定的硬件准确记录报文到达从时钟的时间TS1。同时在主时钟要求主时钟的硬件能准确记录Sync报文离开主时钟的时间TM1,并打包在Follow Up报文中传送到从时钟。(https://www.xing528.com)

图4-230 传输延时的测量
这时可计算主时钟和从时钟的偏移Offset:
Offset=TS1-TM1-Delay=1002-1051-0=-49
Delay是报文从主时钟传到从时钟的传输时间,第一步这个数未知,先设为0。从第一计算得到从时钟约比主时钟慢49s,这时校正时钟TSi+1=TSi+Offset。
2)重复第一步,在TM2从主时钟发出Sync报文,在从时钟接收到Sync报文时要通过特定的硬件准确记录报文到达从时钟的时间TS2。同时在主时钟要求主时钟的硬件能准确记录Sync报文离开主时钟的时间TM2,并打包在Fol-low Up报文中传送到从时钟。
这时可计算主时钟和从时钟的偏移Offset:
Offset=TS2-TM2-Delay=1053-1053-0=0
校正时钟TSi+1=TSi+Offset:
1)从时钟发送DelayRequest,同样发送方准确记录报文发出时间TS3(存在从时钟),接收方准确记录报文接收时间。
2)主时钟发送Delay Response报文,向从时钟送回准确的接收时间TM3。
在从时钟计算Delay:
Delay=(TS2-TM2)+(TM3-TS3)/2=0-(1082-1080)=-1
3)主时钟发送Sync和FollowUp报文从时钟计算偏移:Offset=TS4-TM4-Delay 从上一步已得到的Delay代入=1083-1083-1=-1
校正时间TSi+1=TSi+Offset
4)主时钟发送Sync和FollowUp报文从时钟计算偏移:Offset=TS5-TM5-Delay 从上一步已得到的Delay代入=1086-1085-1=0 这表示从时钟以与主时钟同步
5)定时重复发送同步报文和延时测量报文,不断校正时间偏移,保持准确的同步。
经过延时报文的请求和应答以及同步报文的时间标记,可以计算出两个方向的平均传输延时,由于这些报文的传递都是从时间主站传送到时间从站,是不经过交换机的点对点连接的延时(注意这里使用带边界时钟功能的交换机),所以延时的不确定性大大减少。实际上偏移与延时值的测量是互相影响的,要经过多次测量和计算,才会逐步收敛到接近实际值。测量时间间隔的选取很重要,选择间隔短时通信负载较重,间隔过长则不能保证同步的准确度,所以同步和延时的测量间隔应根据同步要求和系统配置选择。
同步报文的周期和延时测量报文的周期是可以分别设定的,如果要求的同步准确度高,通常校正周期应当短,设备的计算负载和通信负载也重一些,相反负载较轻但准确度可能差一些。
IEEE 1588协议从机理上考虑了传输延时的测量和消除,并且通过后续开发的硬件的支持能准确地记录时间报文的发送时间和时间报文的接收时间,使时间同步准确度不难能达到微秒等级,和进一步提高到0.1μs等级。重要的是这些时间报文并不需要特殊的传输网络也不需要另外设置控制器来处理,它们可以在常规的以太网上传输,系统中原有的处理器很多也能兼任时间协议的处理,所以1588时间协议的应用将会越来越普遍。
(责任编辑:张沪光)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。