



PID英文全称为Proportion Integration Differentiation,PID控制又称比例积分微分控制,是一种闭环控制。下面以图5-51所示的恒压供水系统来说明PID控制原理。
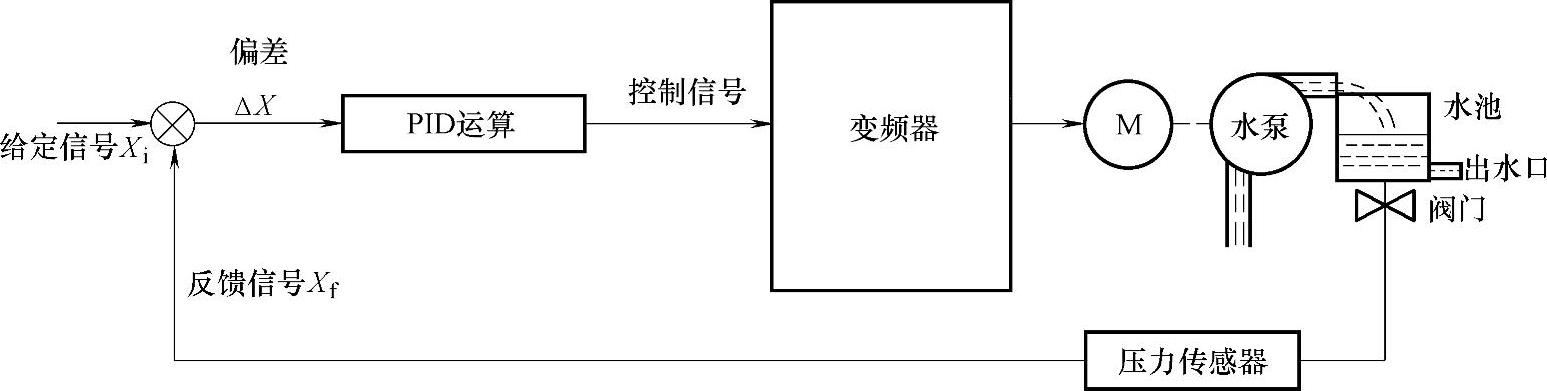
图5-51 恒压供水的PID控制
电动机驱动水泵将水抽入水池,水池中的水除了经出水口提供用水外,还经阀门送到压力传感器,传感器将水压大小转换成相应的电信号Xf,Xf反馈到比较器与给定信号Xi进行比较,得到偏差信号ΔX(ΔX=Xi-Xf)。
若ΔX>0,表明水压小于给定值,偏差信号经PID运算得到控制信号,控制变频器,使之输出频率上升,电动机转速加快,水泵抽水量增多,水压增大。(https://www.xing528.com)
若ΔX<0,表明水压大于给定值,偏差信号经PID运算得到控制信号,控制变频器,使之输出频率下降,电动机转速变慢,水泵抽水量减少,水压下降。
若ΔX=0,表明水压等于给定值,偏差信号经PID运算得到控制信号,控制变频器,使之输出频率不变,电动机转速不变,水泵抽水量不变,水压不变。
由于控制回路的滞后性,会使水压值总与给定值有偏差。例如,当用水量增多、水压下降时,ΔX>0,控制电动机转速变快,提高水泵抽水量,从压力传感器检测到水压下降到控制电动机转速加快,提高抽水量,恢复水压需要一定时间。通过提高电动机转速恢复水压后,系统又要将电动机转速调回正常值,这也要一定时间,在这段回调时间内水泵抽水量会偏多,导致水压又增大,又需进行反调。这样的结果是水池水压会在给定值上下波动(振荡),即水压不稳定。
采用了PID运算可以有效减小控制环路滞后和过调问题(无法彻底消除)。PID运算包括P运算、I运算和D运算。P(比例)运算是将偏差信号ΔX按比例放大,提高控制的灵敏度;I(积分)运算是对偏差信号进行积分运算,消除P运算比例引起的误差和提高控制精度,但积分运算使控制具有滞后性;D(微分)运算是对偏差信号进行微分运算,使控制具有超前性和预测性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。