



1.手动限位控制电动机正、反转
如图7-21所示为手动控制电动机正、反转限位控制电路,工厂车间的行车常采用这种电路。行车的两头终点处各安装一个位置开关SQ1和SQ2,将这两个位置开关的动断触头分别串接在正转控制电路和反转控制电路中。行车前后装有挡铁,行车的行程和位置可通过移动位置开关的安装位置来调节。该电路有采用了两只接触器KM1、KM2。SB1为停止按钮,SB2为正转按钮,SB3为反转按钮。
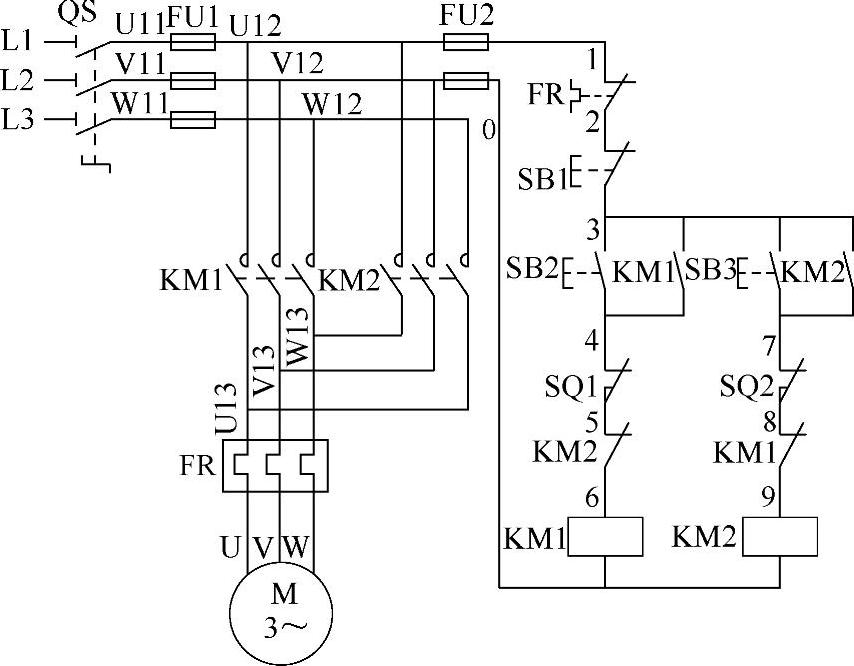
图7-21 电动机正、反转限位控制电路
按下正转按钮SB2,接触器KM1线圈得电,电动机正转,运动部件向前或向上运动。当运动部件运动到预定位置时,装在运动部件上的挡块碰压位置开关SQ1、SQ2(或接近开关接收到信号),使其动断触头SQ1断开,接触器KM1线圈失电,电动机断电、停转。这时再按正转按钮已没有作用。若按下反转按钮SB3,则KM2得电,电动机反转,运动部件向后或向下运动到挡块碰压行程开关或接近开关,接收到信号,使其动断触头SQ2断开,电动机停转。若要在运动途中停车,应按下停车按钮SB1。若要在运动途中停车,应按下停车按钮SB1。
电动机正转的工作过程如下:
1)闭合QS,接通电源。
2)按下正转按钮SB2,接触器KM1线圈得电,如图7-22a所示。
3)KM1主触头闭合,主电路接通,电动机正向起动,运动部件向前或向上运动,如图7-22b所示。
4)KM1辅助动合触头闭合,正转电路自锁,如图7-22c所示。
5)KM1辅助动断触头断开,对KM2互锁,如图7-22d所示。
6)松开SB2,电动机保持正向运转,如图7-22e所示。
7)当运动机构碰触位置开关SQ1,电路失电,电动机停转。
8)按下SB1,电路失电,电动机停转。
电动机反转的工作过程如下:
1)按下SB3,控制电路闭合,KM1线圈得电,如图7-23a所示。
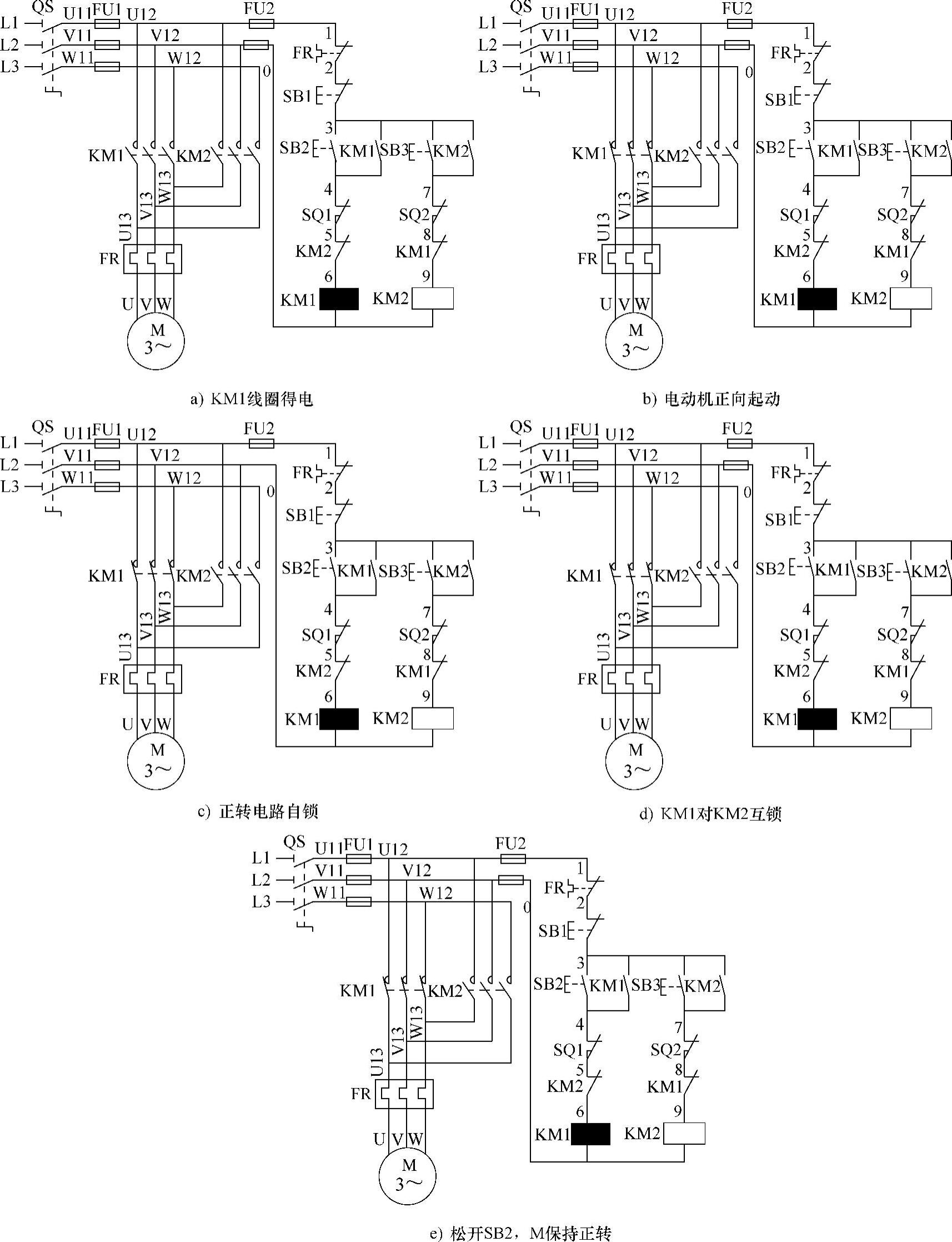
图7-22 电动机正转工作流程
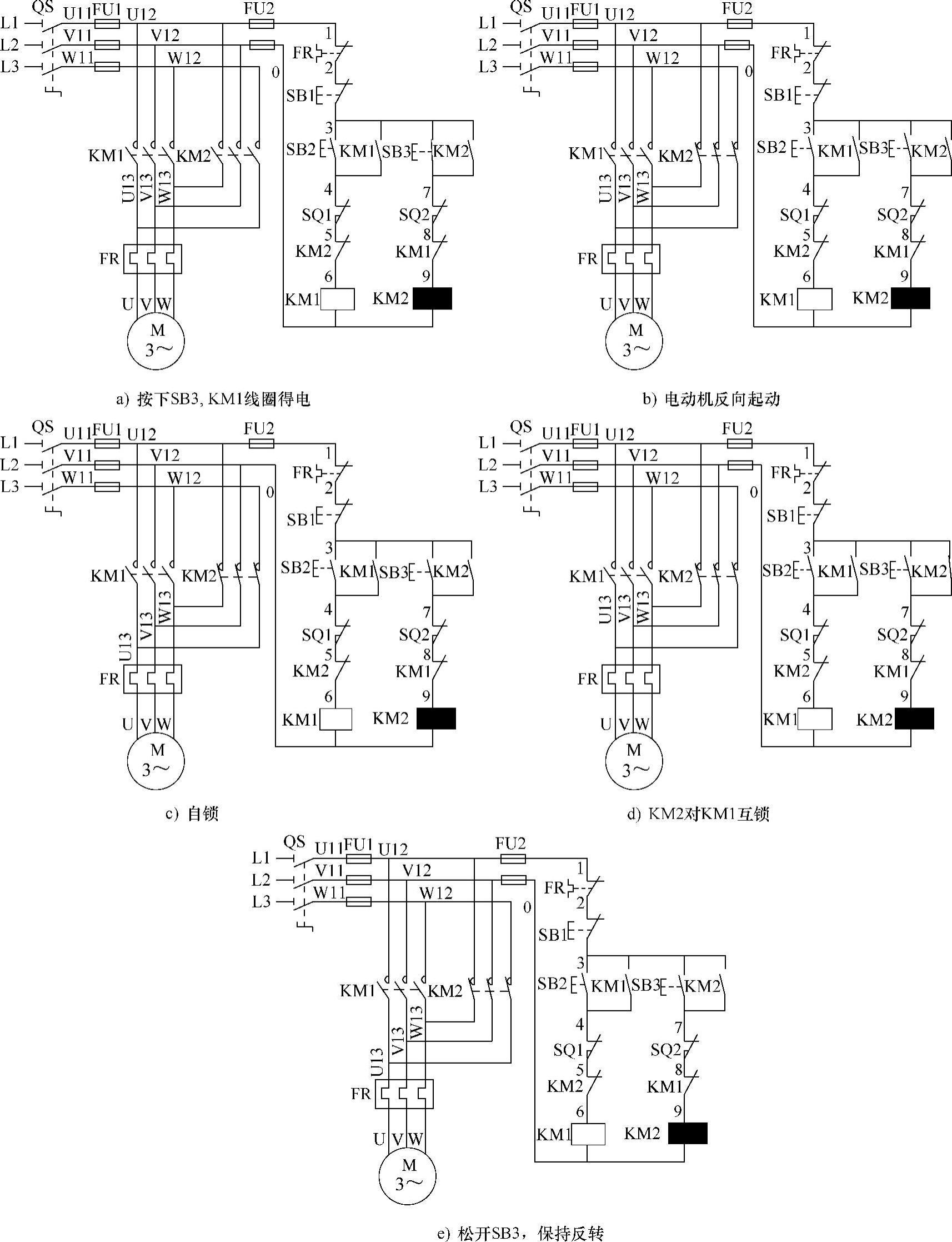
图7-23 电动机反转工作流程
2)KM2主触头闭合,主电路接通,电动机反向起动,运动部件向后或向下运动,如图7-23b所示。
3)KM2辅助动合触头闭合,反转电路自锁,如图7-23c所示。
4)KM2辅助动断触头断开,对KM1互锁,如图7-23d所示。
5)松开SB3,电动机保持反向运转,如图7-23e所示。
6)当运动机构碰触位置开关SQ2,电路失电,电动机停转。
7)按下SB1,电路失电,电动机停转。
指点迷津
如果将图7—21所示手动控制正、反转限位电路中的行程开关采用4个具有动合、动断触头的位置开关(或接近开关)SQ1、SQ2、SQ3、SQ4更换,则成为自动往返控制的电动机正、反转限位电路,如图7-24所示。其中,SQ1、SQ2被用来自动换接电动机正反转控制电路,实现工作台的自动往返行程控制;SQ3、SQ4被用来作终端保护,以防止SQ1、SQ2失灵,工作台越过极限位置而造成事故。图中的SB1、SB2为正转起动按钮和反转起动按钮,如若起动时工作台在右端.则按下SB1起动,工作台往左移动:如若起动时工作台在左端,则按下SB2起动.工作台往右移动。
由此可见,在明白电路原理的前提下对电路进行局部改进,使其功能更完善,也不是很高深莫测的学问,有一定经验的电工是完全能够做到的。
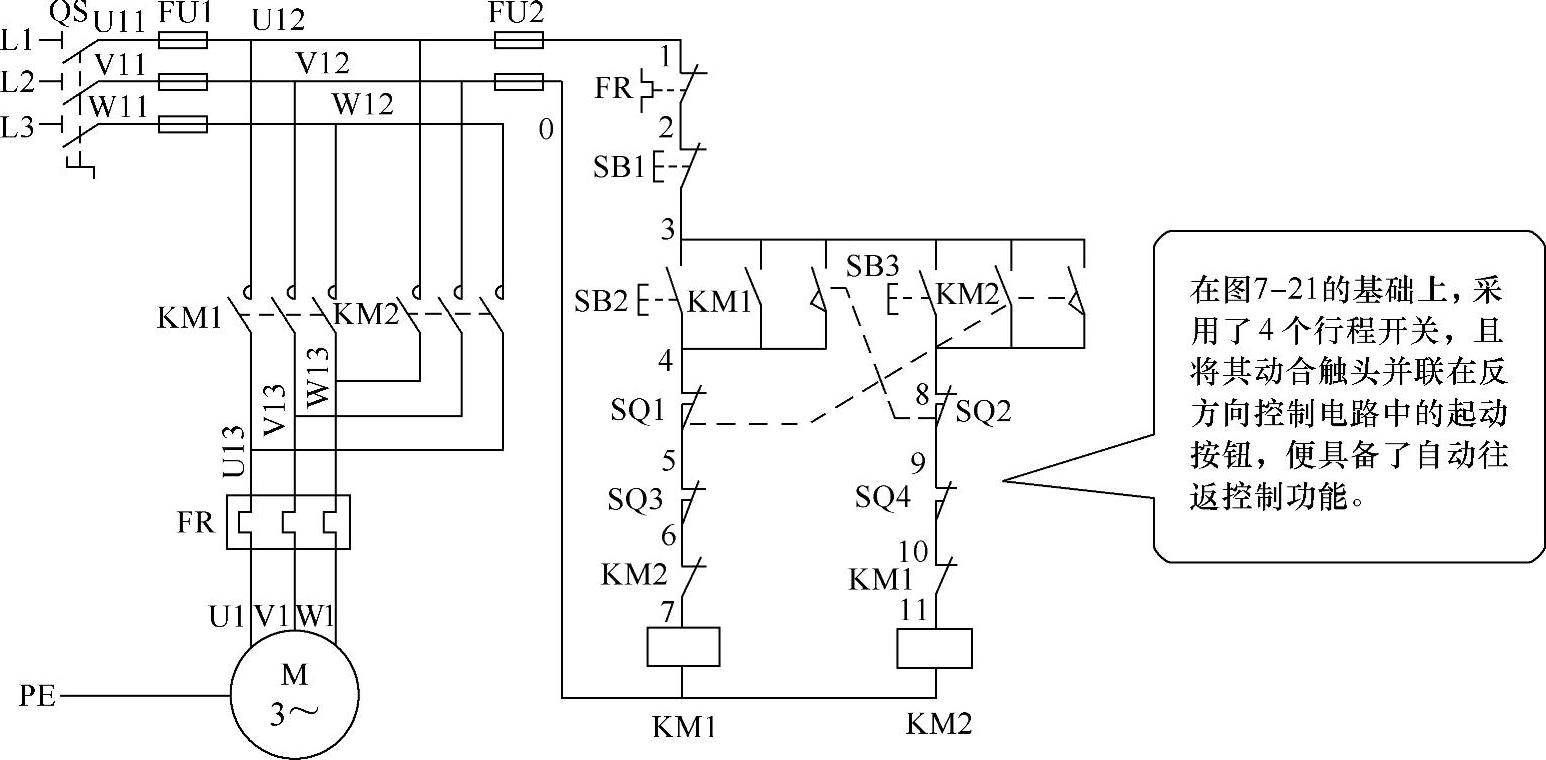
图7-24 工作台自动往返控制电路原理图
2.两台电动机自动循环控制
如图7-25所示为由两台电动机构成的自动循环控制电路图。
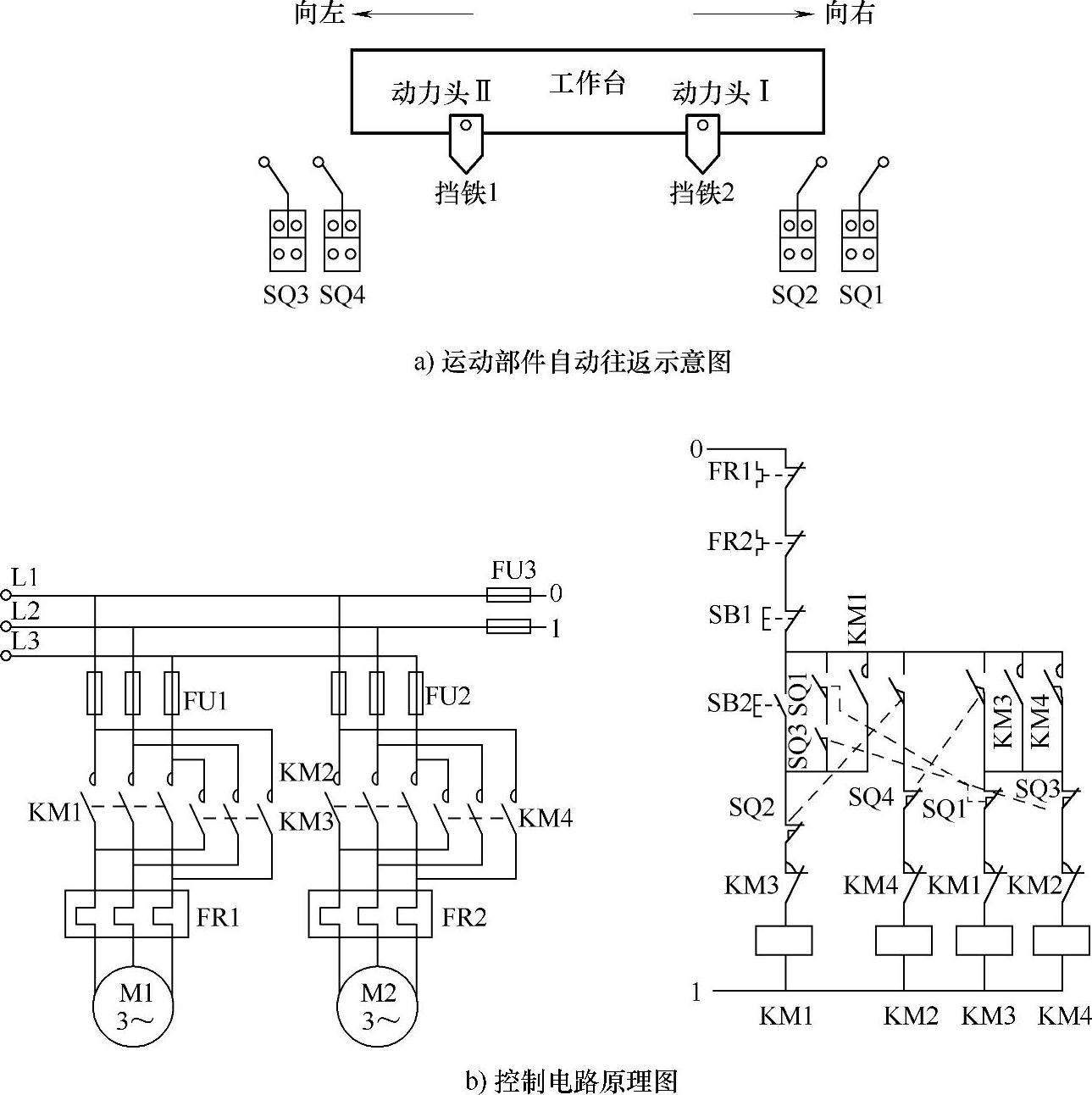
图7-25 两台电动机自动循环控制电路
按下SB2按钮,由于动力头Ⅰ没有压下SQ2,所以动断触头仍处于闭合位置,使KM2线圈得电,动力头Ⅰ拖动电动机M1正转,动力头Ⅰ向前运行。
当动力头Ⅰ运行到终点压下限位开关SQ2时,其动断触头断开,使KM1失电,而动合触头闭合,使KM2得电,动力头Ⅱ拖动电动机M2正转运行,动力头Ⅱ向前运行。当动力头Ⅱ运行到终点时,压迫SQ4,其动断触头断开,使KM2失电,动力头Ⅱ停止向前运行。而SQ4的动合触头闭合,使得KM3、KM4得电,动力头Ⅰ和Ⅱ的电动机同时反转,动力头均向后退。
当动力头Ⅰ和Ⅱ均到达原始位置时,SQ1和SQ3的动断触头断开,使KM3、KM4失电,停止后退;同时它们的动合触头闭合,使得KM1又得电,新的循环开始。(https://www.xing528.com)
该电路在机床运行电路中比较常见。SB2、SQ2、SQ4、SQ1和SQ3是状态变换的条件。
3.两台电动机顺序联锁控制
在装有多台电动机的生产机械上,各电动机所起的作用是不同的,有时需按一定的顺序起动或停止,才能保证操作过程的合理和安全可靠。例如,在X62W型万能铣床上,要求主轴电动机起动后,进给电动机才能起动;M7120型平面磨床的冷却泵电动机要求当砂轮电动机起动后才能起动。这种要求几台电动机的起动或停止必须按一定的先后顺序来完成的控制方式,叫做电动机的顺序控制。
顺序控制可以通过控制电路实现,也可通过主电路实现。
如图7-26所示为两台电动机顺序联锁控制电路,M1先起动运行后,M2才允许起动;停止则无要求。
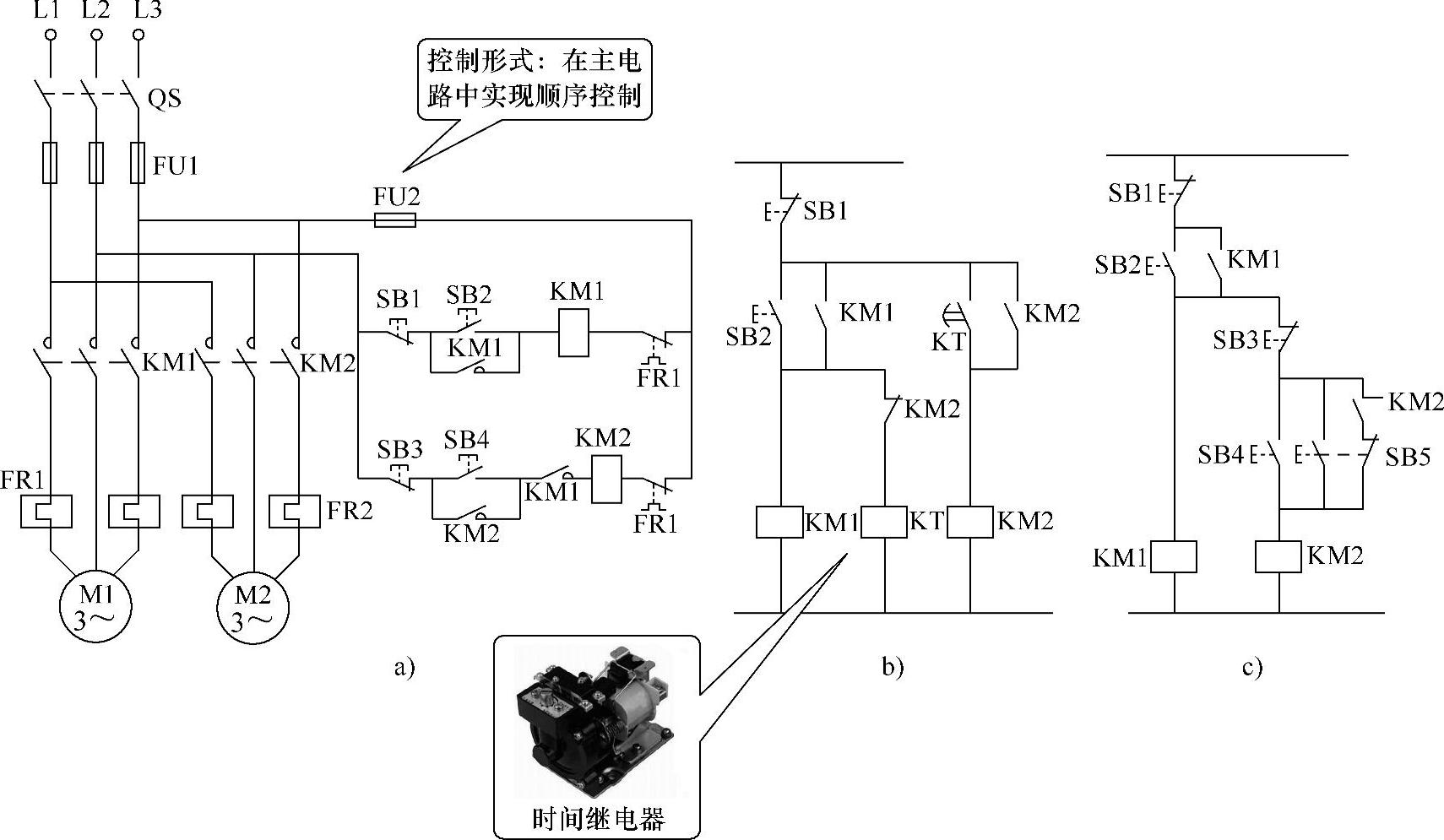
图7-26 两台电动机顺序联锁控制电路原理图
图7-26a所示的两台电动机顺序起动联锁控制电路。起动时,必须先按下SB2,KM1有电,M1起动运行,同时KM1串在KM2线圈回路中的动合触头闭合(辅助触头实现自锁),为KM2线圈得电做好准备。当M1运行后,按下SB4,KM2得电,其主触头闭合(辅助触头实现自锁),M2起动运行。该电路中电动机停止时有两种方式:
1)按顺序停止:当按下SB3时,KM2断电,M2停车;再按下SB1,KM1断电,M1停车。
2)同时停止:直接按下SB1,交流接触器KM1、KM2线圈同时失电释放,各自的三相主触头均断开,两台电动机M1、M2同时断电停止工作。
图7-26b是两台电动机自动延时起动电路。起动时,先当按下SB2时,KM1得电,M1起动运行,同时KT时间继电器得电,延时闭合,使KM2线圈回路接通,其主触头闭合,M2起动运行。
若按下停车按钮SB1,则两台电动机M1、M2同时停车。
图7-26c是一台电动机先起动运行、然后才允许另一台电动机起动运行,并且具有点动功能的电路。起动时,当按下SB2时,KM1得电,M1起动运行。这时按下SB4,使KM2有电,M2起动,连续运行。若此时按下SB5,M2就变为点动运行,因为SB5的动断触头断开了KM2的自锁回路。
4.电动机多地控制
能够在两处或者两处以上同时控制一台电动机的控制方式,叫做电动机多地控制,也称为多点控制。这是为了解决在生产实际中,两处以上同时控制一台电气设备的控制要求(例如,大型机床为操作方便,往往要求在两个或两个以上的地点都能进行操作),减轻劳动者的劳动强度,避免来回奔波而设计出的多地控制电路。
如图7-27所示为电动机两点控制电路。图中,SB11、SB12为安装在甲地的起动按钮和停止按钮;SB21、SB22为安装在乙地的起动按钮和停止按钮。
该线路的特点是:两地的起动按钮SB11、SB21并联在一起;停止按钮SB12、SB22串联在一起。这样就可以分别在甲、乙两地起动和停止同一台电动机,达到方便操作的目的。
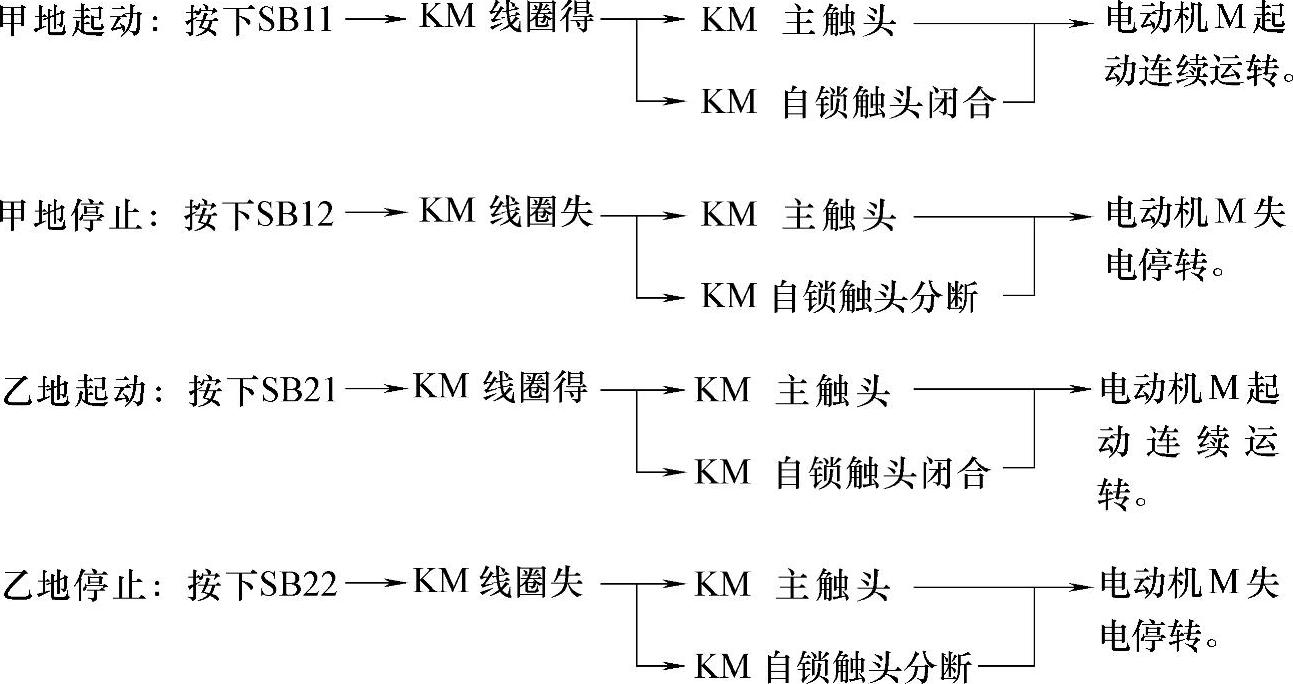
下面介绍该电路的工作原理。
先合上电源开关QS。
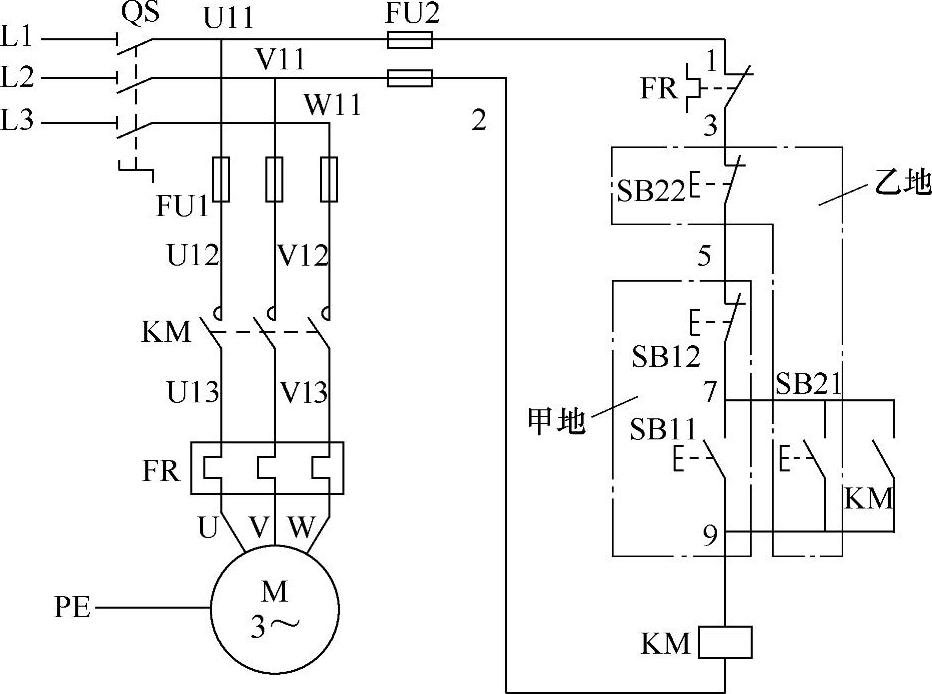
图7-27 电动机两点控制电路原理图
值得说明的是,两地控制电路的主电路与电动机正转电路相同,不同的是控制电路。要实现三地或多地控制,只要把各地的起动按钮并联,停止按钮串联即可。
指点迷津
如果将上述控制电路用图7-28所示的电路更换,就可实现在三个地点控制一台电动机的起停。图中.SB1、SB4为第一地点控制按钮,SB2、SB5为第二地点控制按钮,SB3、SB6为第三地点控制按钮。
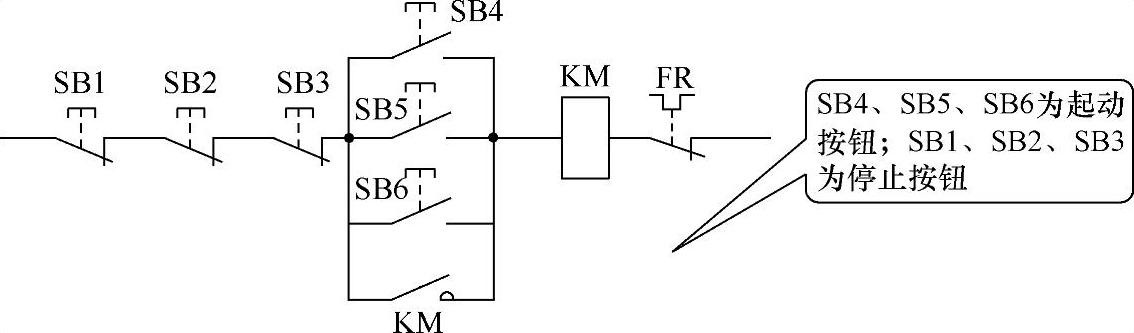
图7-28 电动机三点控制电路
5.电动机时间控制
如图7-29所示为某三相异步电动机时间控制电路。
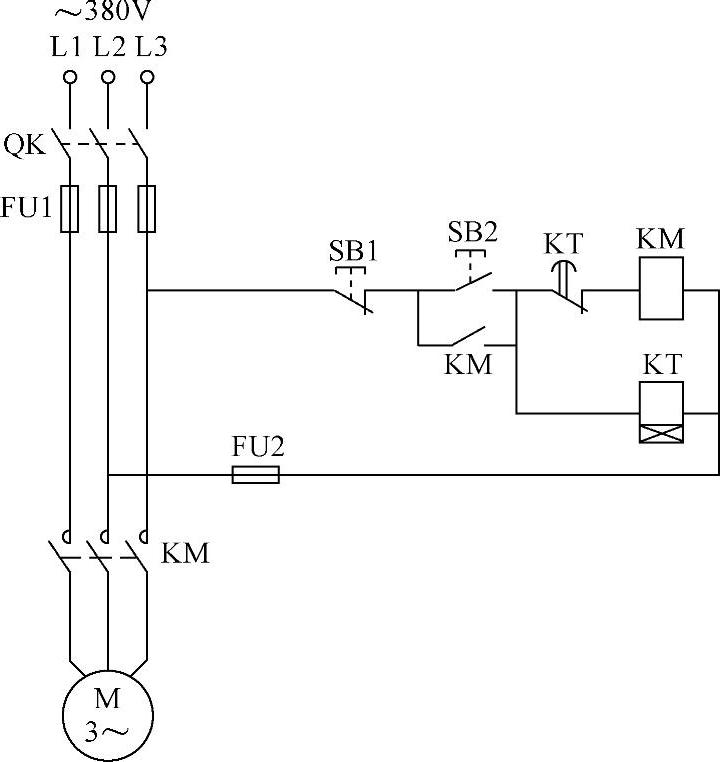
图7-29 三相异步电动机时间控制电路
按起动按钮SB2,接触器KM带电,并“自锁”,电动机起动运行。与此同时,时间继电器KT带电,并开始计时,当达到预先整定的时间,它的延时“动断”触头KT断开,切断接触器控制电路,电动机停止。同样,用时间继电器的延时“动合”触头,可以接通接触器控制电路,实现时间控制。
时间继电器延时时间根据需要进行整定。如整定为5s,检查接线正确后合上主电源,起动电动机,观察交流接触器、时间继电器和电动机的动作情况;改变时间继电器的延时时间为10s,重复上述操作。
6.三相异步电动机调速控制
在生产机械中,广泛使用不改变同步转速的调速方法有绕线转子电动机的转子串电阻调速、斩波调速、串级调速以及应用电磁转差离合器、液力耦合器、油膜离合器等的调速。改变同步转速的调速方法有改变定子极对数的多速电动机,改变定子电压、频率的变频调速有能无换向电动机调速等。
从调速时的能耗观点来看,有高效调速方法与低效调速方法两种。高效调速指时转差率不变,因此无转差损耗,如多速电动机、变频调速以及能将转差损耗回收的调速方法(如串级调速等)。有转差损耗的调速方法属低效调速,如转子串电阻调速方法,能量就损耗在转子回路中;电磁离合器的调速方法,能量损耗在离合器线圈中;液力耦合器调速,能量损耗在液力耦合器的油中。一般来说转差损耗随调速范围扩大而增加,如果调速范围不大,能量损耗是很小的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。