



1.三相异步电动机的起动方式
异步电动机从接通电源开始转动,转速逐渐上升直到稳定运转状态,这一过程称为起动。电动机能够起动的条件是起动转矩必须大于负载转矩。
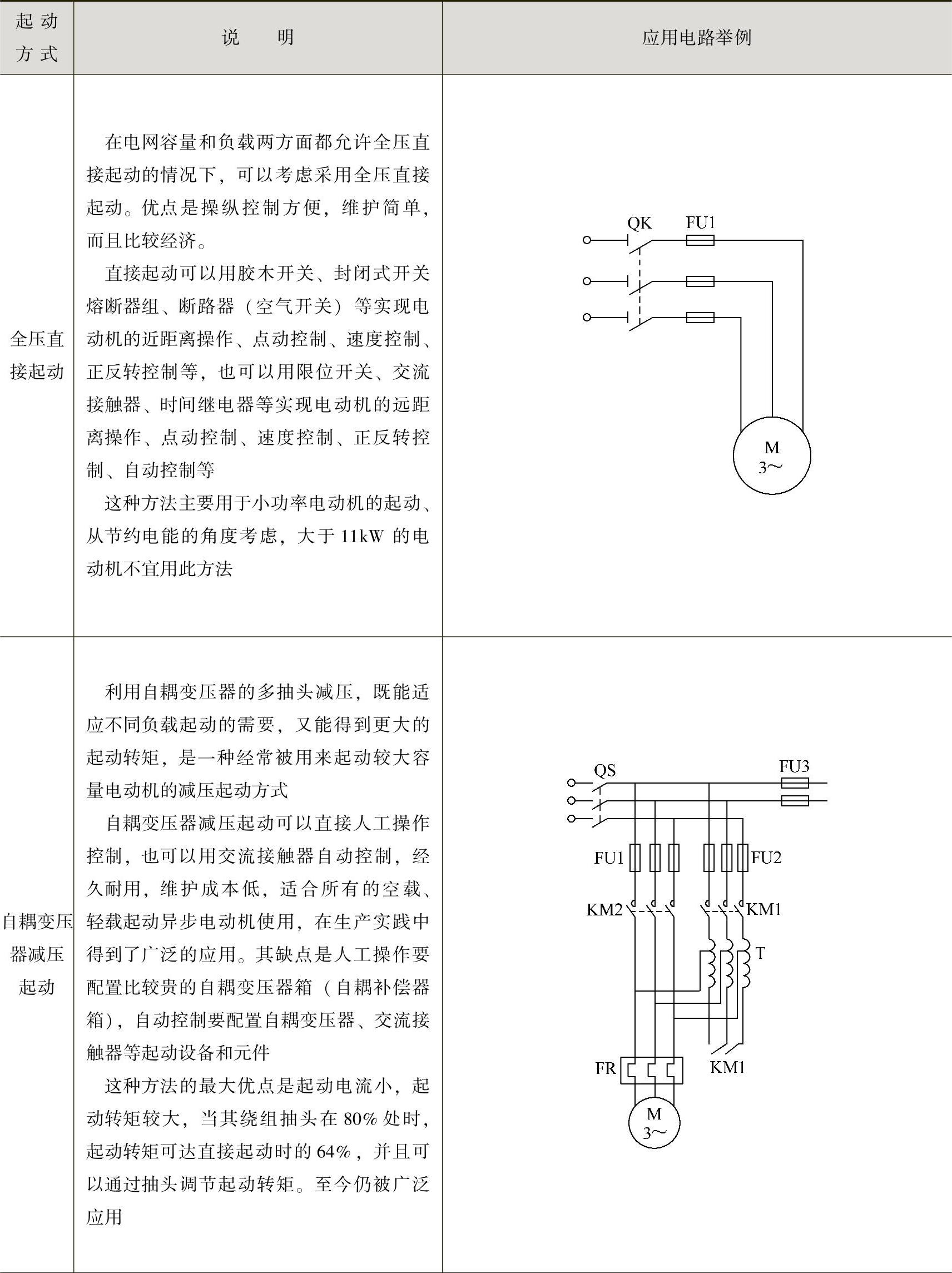
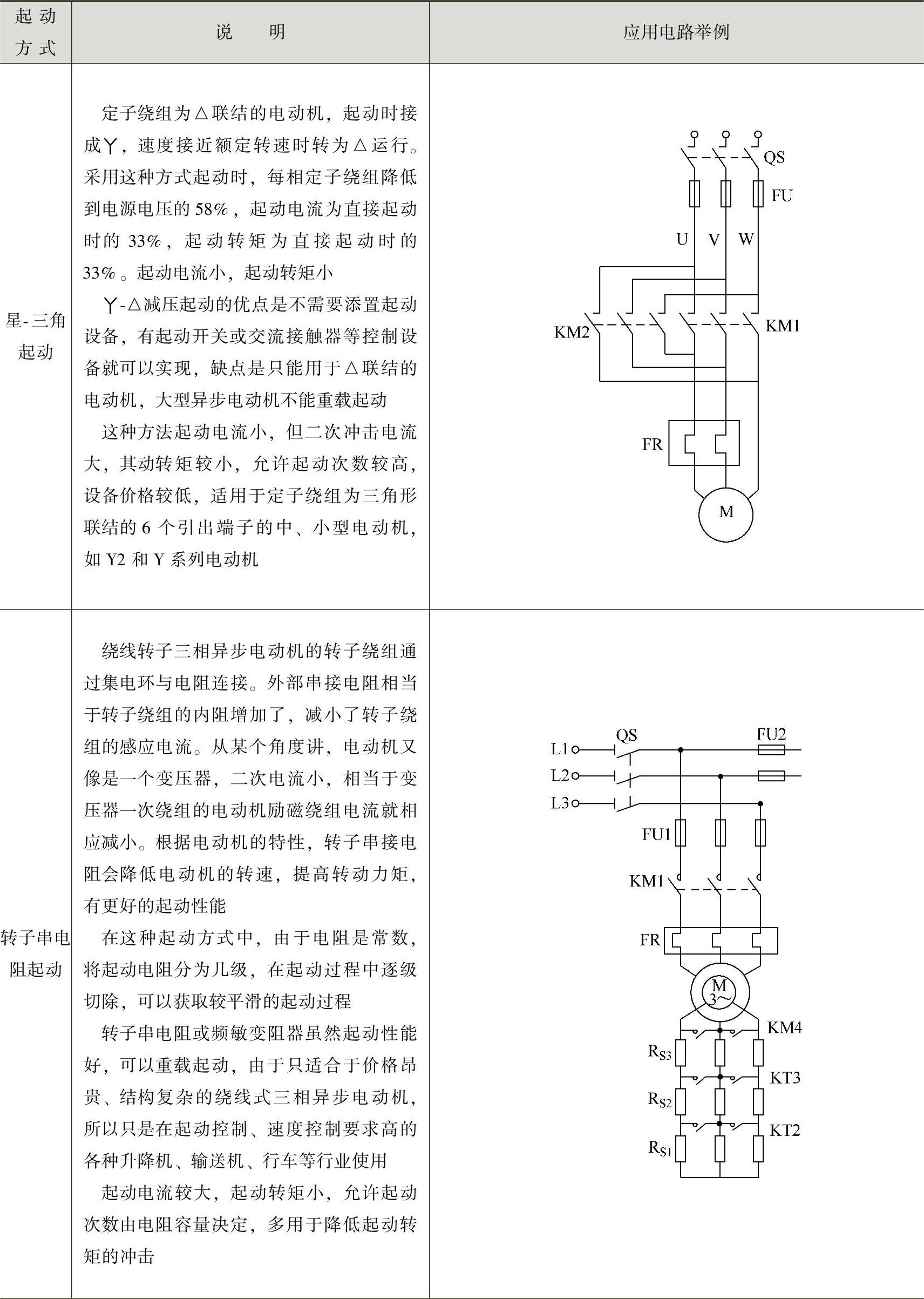
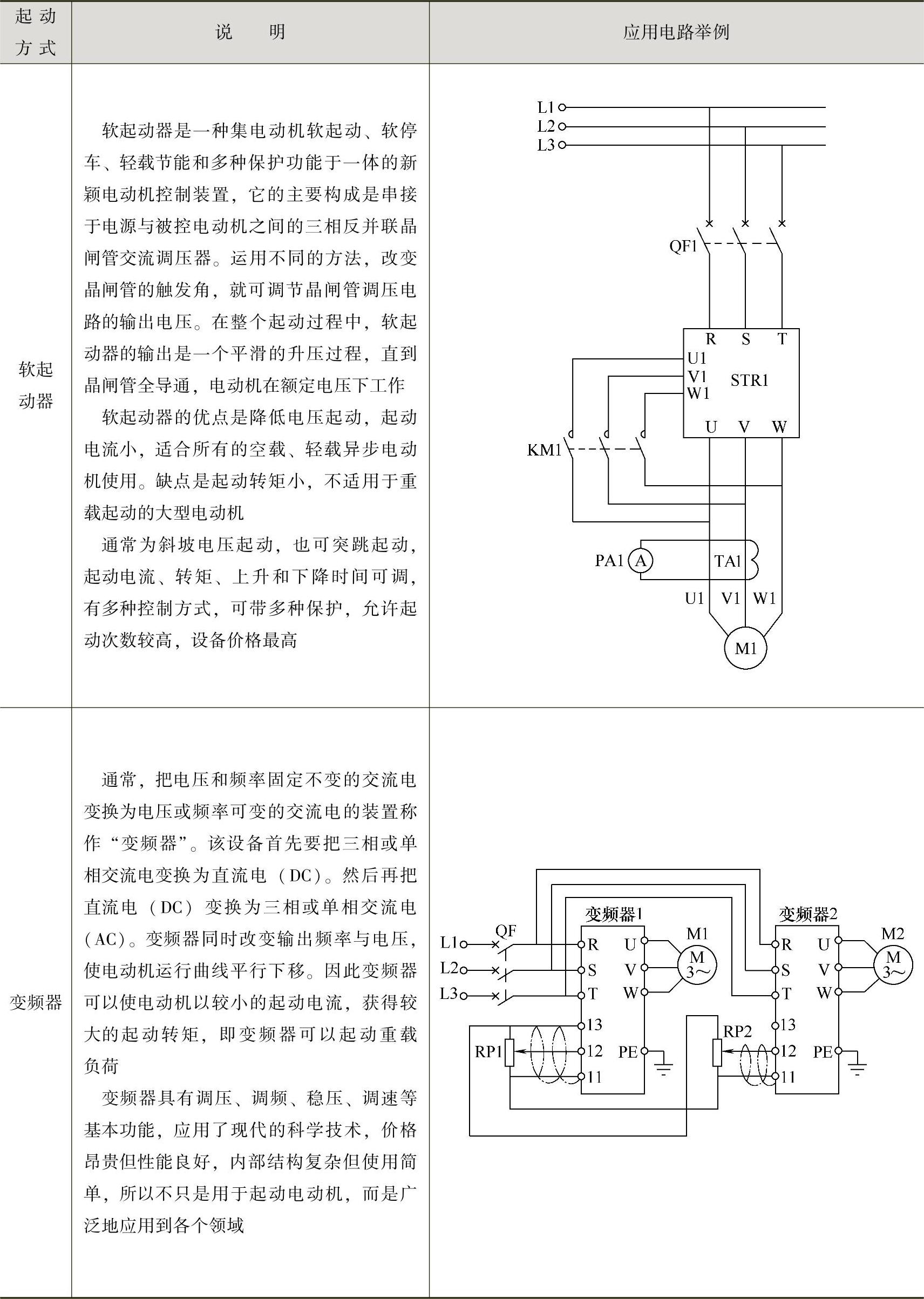
三相异步电动机的起动方式主要有直接起动、用自耦变压器减压起动、星-三角( -△)减压起动、转子串电阻起动、软起动器和变频器起动,见表7-7。
-△)减压起动、转子串电阻起动、软起动器和变频器起动,见表7-7。
表7-7 三相异步电动机几种起动方式比较
(续)
(续)
指点迷津
在以上几种起动控制方式中,星一三角起动、自耦减压起动因其成本低,维护相对软起动和变频控制容易,目前在实际运用中还占有很大的比重。但因其采用分立电气元件组装,控制线路接点较多,在其运行中,故障率相对还是比较高。从事过电气维护的技术人员都知道.很多故障都是电气元件的触头和连线接点接触不良引起的,在工况环境恶劣(如粉尘,潮湿)的地方,这类故障更多,检查起来确颇费时间。另外有时根据生产需要,要更改电动机的运行方式,如原来电动机是连续运行的,需要改成定时运行,这时就需要增加元件,更改线路才能实现。有时因为负载或电动机变动.要更改电动机的起动方式,如原来是自耦起动,要改为星一三角起动,也要更改控制线路才能实现。
2.三相异步电动机的制动方式
在技术上,让电动机断开电源后迅速停止的方法,叫做制动。使电动机制动的方法有多种,应用广泛的有机械制动和电力制动两大类。
(1)机械制动
所谓机械制动是指利用机械装置使电动机切断电源后立即停转。目前广泛使用的机械制动装置是电磁抱闸,其主要工作部分是电磁铁和闸瓦制动器。电磁铁由电磁线圈、静铁心和衔铁组成,如图7-6所示;闸瓦制动器由闸瓦、闸轮、弹簧和杠杆等组成,如图7-7所示。其中,闸轮与电动机转轴相连,闸瓦对闸轮制动力矩的大小可通过调整弹簧作用力来改变。
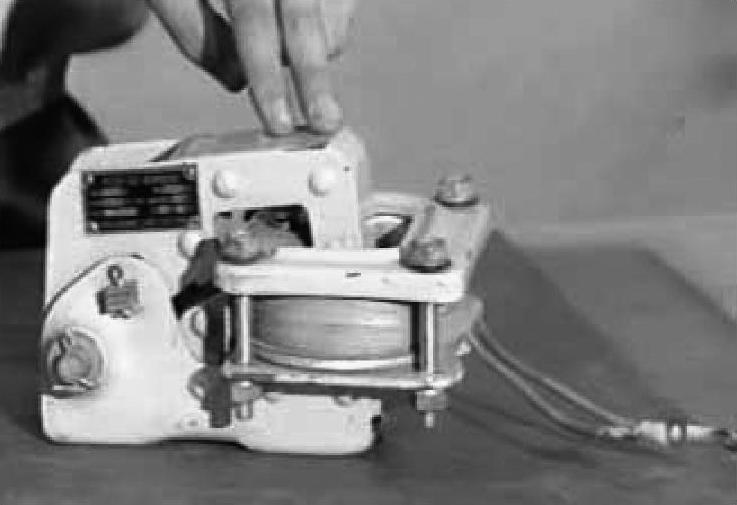
图7-6 电磁铁
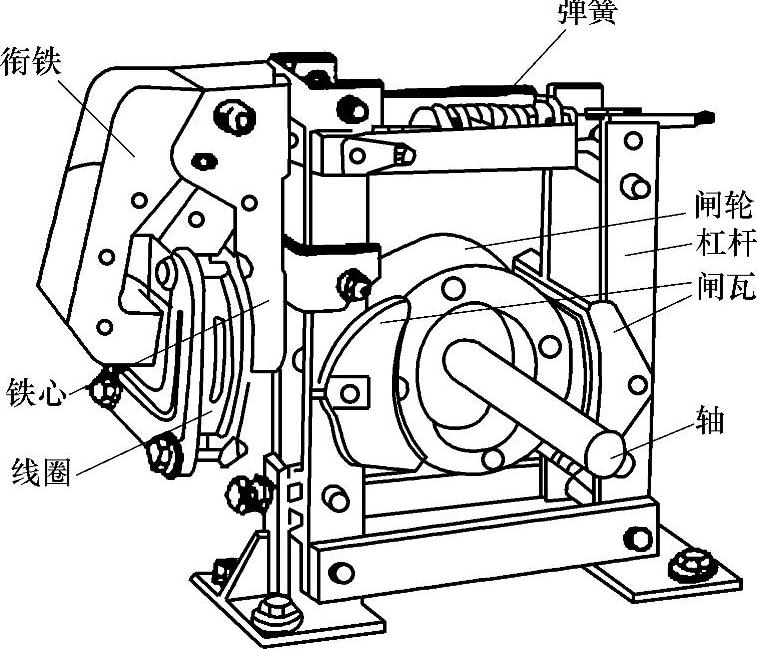
图7-7 闸瓦制动器
如图7-8所示为电磁抱闸制动控制电路,这种制动是在电源切断时才起制动作用,机械设备不工作时,制动闸处于“抱住”状态,广泛应用在电梯、起重机、卷扬机等一类升降机械上。
按下SB2,KM1得电,主触头闭合,电磁抱闸的闸轮松开。同时,运行接触器KM2也得电,KM2的自锁触头和主触头均闭合,电动机起动运行。
当制动时,按下电动机停止按钮SB1,接触器KM2失电释放,主触头断开,自锁触头解除自锁,电动机断电。同时KM1失电释放,主触头断开,联锁触头解除联锁,从而YB得电动作,使抱闸与闸轮抱紧,电动机停止运行。
松开SB1,电磁铁线圈YB失电释放,抱闸放松,为下一次运行做好准备。
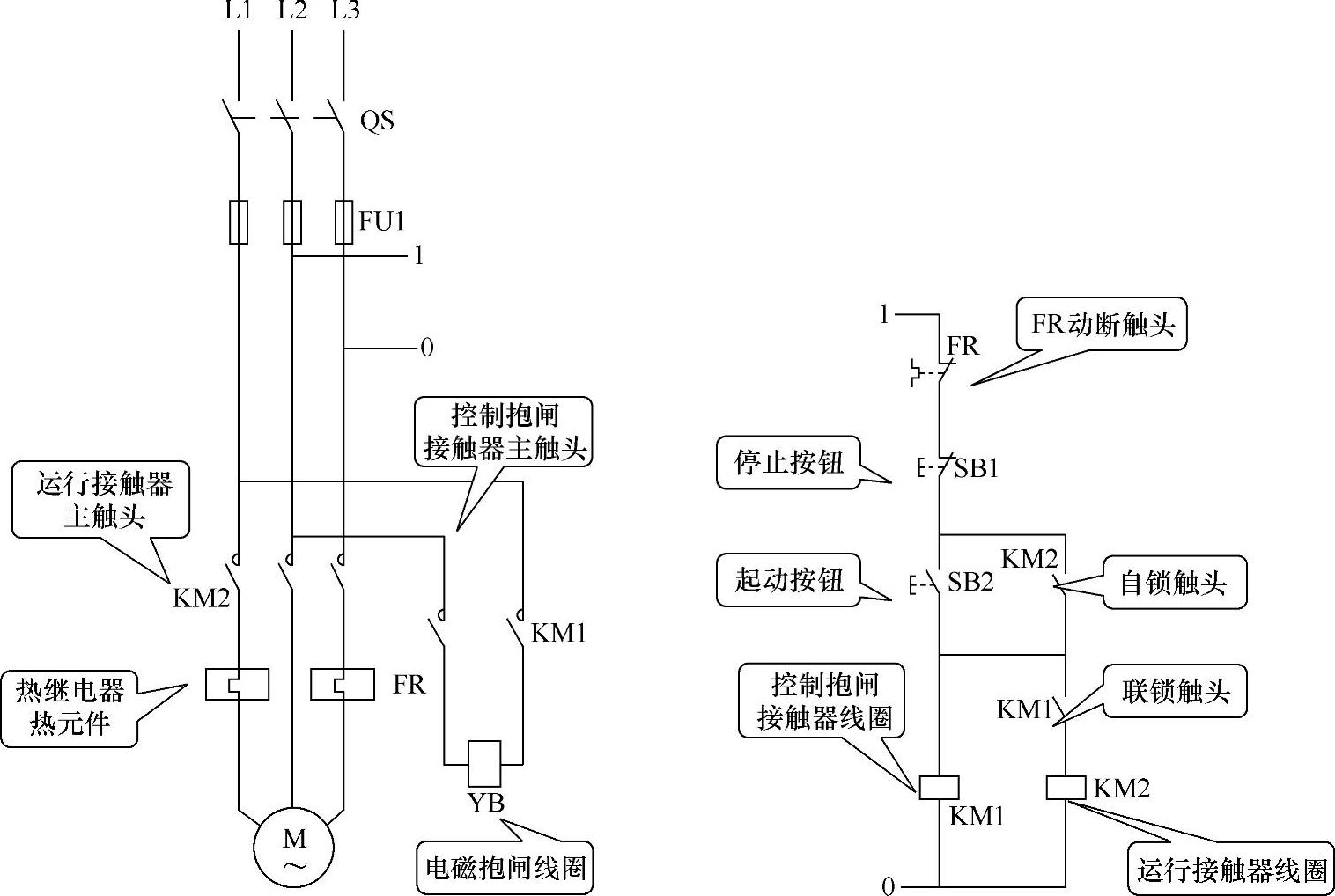
图7-8 电磁抱闸制动电路
(2)电力制动(https://www.xing528.com)
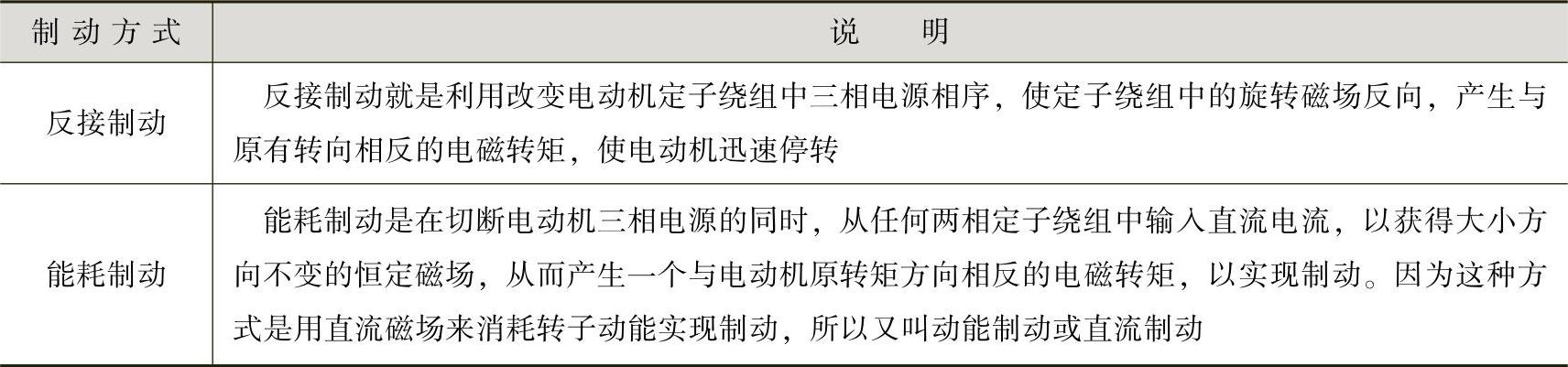
电动机需要制动时,通过电路的转换或改变供电条件,使其产生与实际运转方向相反的电磁转矩(即制动转矩),迫使电动机迅速停止转动的制动方式叫电力制动。电力制动有反接制动和能耗制动等方式,见表7-8。
表7-8 三相异步电动机电力制动
3.反接制动控制电路
直接反接制动时,转子与旋转磁场的相对转速接近同步转速的两倍,所以定子绕组中流过的反接制动电流也相当于全压起动时电流的两倍,因此直接反接制动特点仅适用于小容量电动机。为了限制电流和减小机械冲击,通常在反接制动时,采用在定子电路中串接适当电阻的方法,如图7-9中的R,电动机在制动力矩作用下转速下降到接近零时,应及时切除电源以防止电动机的反向再起动。
采用速度继电器按速度原则控制的反接制动电路如图7-9所示。其工作过程如下:
按下SB2,KM1得电,电动机正常运转,此时速度继电器BV的动合触头闭合,为反接制动做好准备;按下SB1,KM1失电后KM2通电,使电动机定子绕组经电阻R后与反相序的电源接通,反接制动开始;由于电动机与速度继电器转子是同轴连接的,当电动机转速高于120r/min时,速度继电器动合触头BV闭合,反接制动保持;当电动机转速小于100r/min时,速度继电器动合触头BV断开,KM2断电,反接制动结束。
反接制动过程的结束由电动机转速来控制,这种由速度达到一定值而发出转换信号的控制称为按速度原则的自动控制。
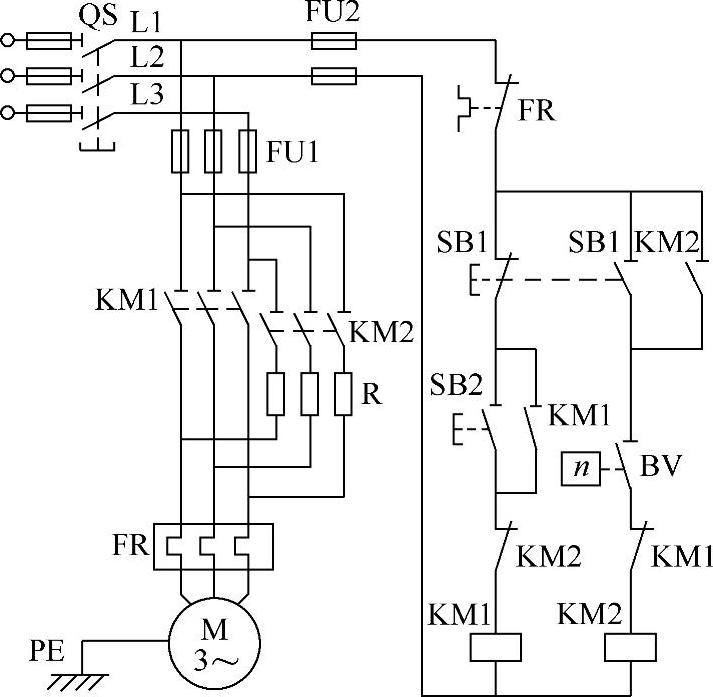
图7-9 按速度原则控制的反接制动电路
指点迷津
为了防止反接制动变成反向旋转,最有效的办法是利用速度继电器检验减速效果。当速度降低到一定程度(接近零速)时立即断开电源。如果没有速度继电器或者速度继电器损坏,靠人工观察的方法来断开电源,稍有不慎即可导致电动机反向旋转,造成事故。
4.能耗制动控制电路
如图7-10所示为由时间继电器控制的能耗制动控制电路,适用于笼型电动机的能耗制动。
在图7-10中,主电路在进行能耗制动时所需的直流电源,由4个二极管组成单相桥式全波整流电路通过接触器KM2引入,交流电源与直流电源的切换由KM1和KM2来完成,制动时间由时间继电器KT决定。
当起动电动机时,按下起动按钮SB2后,KM1交流接触器线圈得电吸合,其动合触头闭合后自锁,另一动合触头闭合后使时间继电器KT线圈得电工作;KM1的动断触头断开后,可防止KM2线圈误得电而工作;KM1三组动合触头闭合后,使电动机得电工作。
在时间继电器KT线圈通电后,其动合延时分断触头瞬间接通,但由于KM1的动断触头已断开,故KM2不会得电工作。
在需要停机时,按下停止按钮SB1后,KM1线圈断电释放,其所有触头均复位,当KM1已闭合的触头断开后,KT线圈断电;KM1触头复位闭合使KM2交流接触器线圈得电吸合,其KM2动断触头断开可防止KM1线圈得电误动作。KM2的两组动合触头与KM2动断触头闭合使电源变压器T一次侧得电工作。从二次侧输出的交流低压经桥式整流,得到的直流电压加到电动机定子绕组上,从而使电动机迅速制动停机。
经过一段时间后,时间继电器延时分断触头断开,使KM2线圈的供电通路被切断,KM2释放并切断了直流电源,制动过程结束。
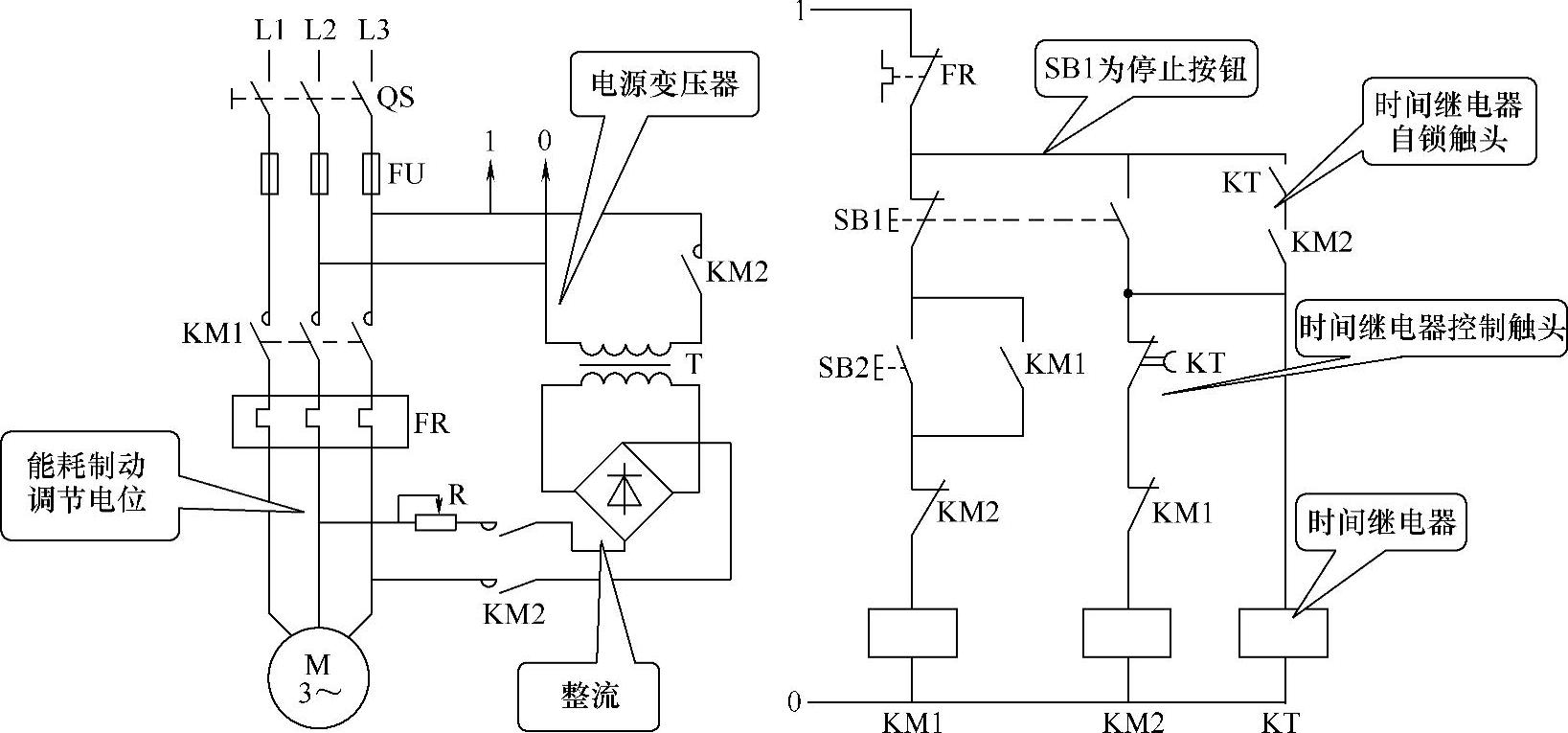
图7-10 时间继电器控制的能耗制动控制电路
指点迷津
能耗制动的优点是制动准确平稳且能量消耗较小.缺点是需附加直流电源装置、设备费用较高、制动力较弱、在低速时制动力较小。因此,能耗制动一般用于要求制动准确、平稳的场合。
能耗制动时产生的制动转矩的大小.与通入定子绕组中直流电流的大小、电动机的转速及转子电路中的电阻有关。电流越大,产生的静止磁场就越强,而转速越高,转子切割磁力线的速度就越大,产生的制动转矩也就越大。对于笼型异步电动机.增大制动转矩只能通过增大通入电动机的直流电流来实现.而通入的直流电流又不能太大.过大会烧坏定子绕组,、
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。