



1.引言
交流电动机结构简单、成本低,安装环境要求低,适于易燃、易爆、多尘的场合,尤其是在大容量、高转速应用领域,备受青睐。但是交流电动机是一个多输入多输出(MIMO)、非线性、强耦合且时变的被控对象,由于被控对象的复杂性,直接导致了交流电动机转矩控制的困难。通过矢量控制,将交流电动机等效成直流电动机,从而获得较好的转矩特性,这些已于前面有详述。
近年来,众多学者对如何使电动机矢量控制的效果更加显著进行了相关的研究,如在矢量控制的基础上采用模糊控制器。模糊控制是一种基于规则的控制,在设计中被控对象不需要建立精确的数学模型。模糊控制器可以获得良好的动态特性,但无法消除系统的静态误差。
本方案在分析矢量控制的基础上,结合常规PID控制器和模糊控制器的特点,采用模糊PID控制器,建立相应的电动机调速模型。通过与传统的PID矢量控制模型进行比较,详细说明该模型的特点。
2.交流电动机矢量控制
以产生同一的旋转磁动势为准则,交流异步电动机的定子交流电流ia、ib、ic,通过三相/两相变换可以等效成两相静止坐标系上的交流电流iα和iβ,再通过同步旋转变换,可以等效成同步旋转坐标系上的直流电流id、iq:

按照转子磁链定向条件时交流电动机模型,取d轴沿着转子磁链矢量ψr方向为M轴;T轴为逆时针转90°,垂直于矢量ψr。由于是以转子磁链ψr方向作为M轴的方向,此时有Ψrd=ΨrM=|Ψr|,Ψrq=ΨrT=0。得到此时电磁转矩和电压方程为
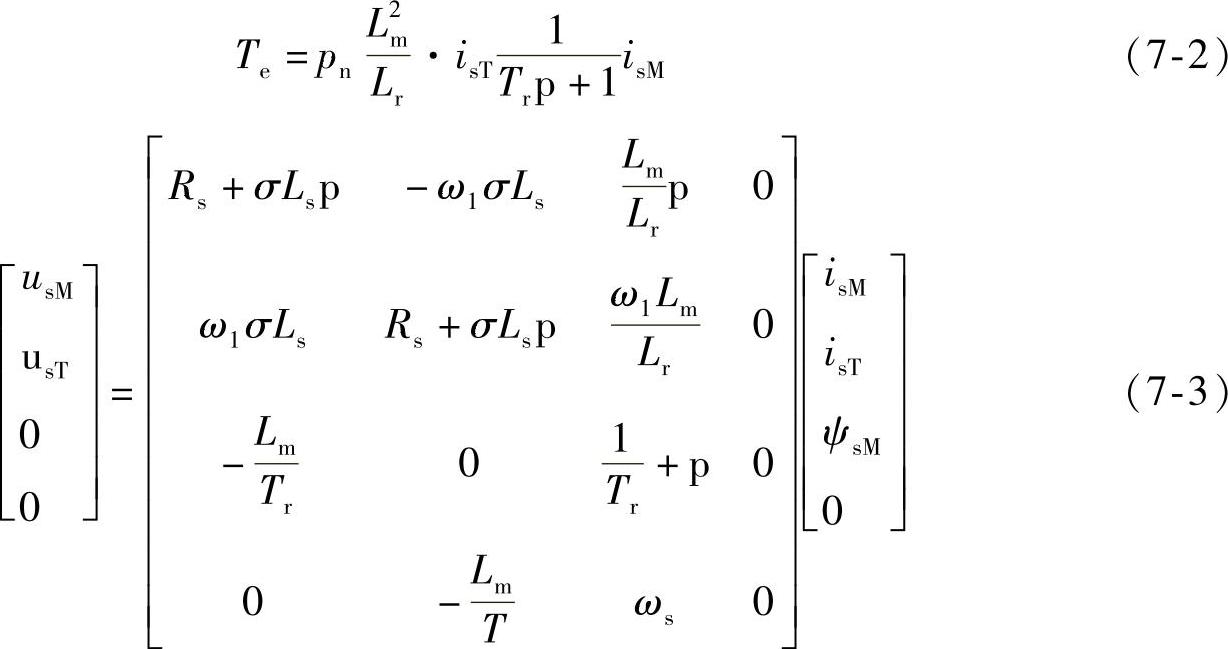
因此有

式中 pn——极对数;
Lm——互感;
Lr——转子电感;
Ls——定子电感;
Rs——定子电阻;σ=1-L2m/(LsLr);
p——微分算子,p=d/dt;
ω1——同步角速度;
ωr——电动机转子角速度;
ωs——转差角速度;
Tr=Lr/Rt。
由以上公式可以得到以下结果:
转子磁链ψr仅由定子电流励磁分量isM产生,与转矩分量isT无关。式(7-5)还表明ψrm与isM之间的传递函数是一阶惯性环节。当励磁电流分量isM突变时,ψr的变化要受到励磁惯性的阻挠,这和直流电动机励磁绕组的惯性作用是一致的。
转子磁链的位置可由 得出,对于交流异步电动机,由于其转子磁链的初始位置θr(0)是由定子电流决定的,如果系统运行时就采用矢量控制,则可以认为θr(0)=0。得到磁链位置θr后,可以通过旋转变换得到励磁电流分量isM,进而根据式(7-5)求得ψrM,并实施反馈控制。
得出,对于交流异步电动机,由于其转子磁链的初始位置θr(0)是由定子电流决定的,如果系统运行时就采用矢量控制,则可以认为θr(0)=0。得到磁链位置θr后,可以通过旋转变换得到励磁电流分量isM,进而根据式(7-5)求得ψrM,并实施反馈控制。
图7-9是根据上述原理建立的系统仿真图。异步电动机由电流控制PWM逆变器供电驱动,转速控制器根据给定转速与实测转速之差,得到转矩期望值Te;转矩电流分量ist由转速控制器的输出Te和转子磁链估计值ψrm进行计算;ist和ism经过逆旋转变换和2/3变换,得到三相电流给定值ia∗、ib∗、ic∗。ia∗、ib∗、ic∗与实测三相电流ia、ib、ic作为电流控制器的输入,电流控制器输出逆变器PWM触发信号,控制逆变器驱动异步电动机运行。
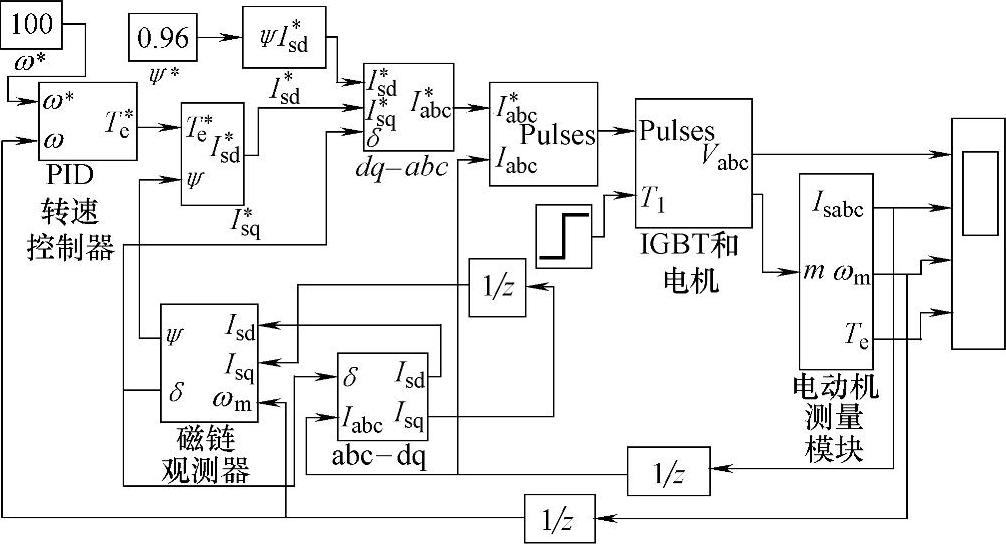
图7-9 系统仿真图
3.模糊PID控制
传统的PID控制算法结构简单,对于大多数的控制过程都具有良好的控制效果和鲁棒性,参数物理意义明确,理论分析体系完整,且应用经验丰富,因此被广泛应用于实际工程中。但是,常规PID控制器也有缺点,前面已作讲述。
模糊控制是一种基于规则的控制,直接采用语言控制规则,在设计中不需要建立被控对象的精确数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。从工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取、动态特性不易掌握或变化非常显著的对象非常适用。
但是模糊控制也有其自身不可克服的缺点,模糊控制器的输出一般与误差及误差变化率有关,因此这种控制器只有比例—微分作用,没有积分环节,理论上很难克服稳态误差。如果把两者结合起来,就可以构成兼有两者优点的模糊PID(Fuzz-y—PID)控制器。所以,针对被控对象的特性,我们选择利用模糊控制器来给PID控制器在线自整定PID参数,组成模糊自整定参数PID控制器的控制策略。
模糊PID控制主要是找出在不同时刻时PID的三个参数与e和ec之间的模糊关系,在运行中不断检测e和ec,根据模糊控制原理来对三个参数进行在线修改,以满足不同e和ec对控制参数的不同要求,从而使得被控对象具有良好的动、静态性能,模糊PID控制器如图7-10所示。(https://www.xing528.com)
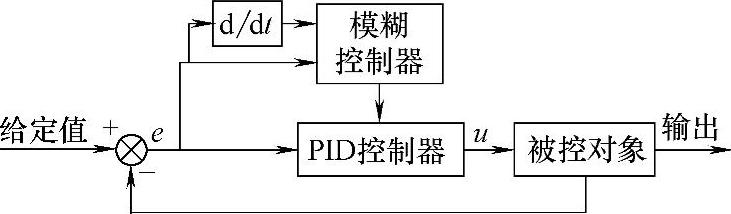
图7-10 模糊PID控制器
PID参数的整定必须考虑到不同时刻三个参数的作用以及相互之间的关系。由传统经验可知,在控制过程中对参数kp、ki、kd的自整定要求如下:
当偏差|e|较大时,为了加速系统的响应速度,应取较大的kp;同时为了避免由于开始时偏差e的瞬间变大可能出现的微分过饱和而使控制作用超出许可范围,应取较小的kd;同时为了防止系统响应出现较大的超调,应对积分作用加以限制,通常取ki=0,去掉积分作用。
当|e|和|ec|处于中等大小时,为了使系统响应具有较小的超调,kp应取小一点,ki、kd的取值要大小适中,以保证系统的响应速度。
当|e|较小,即接近设定值后时,为使系统具有良好的稳态性能,应增大kp和ki的取值,同时为避免系统在设定值附近出现振荡,并考虑系统的抗干扰性能,当|ec|较小时,kd取值应较大些,当|ec|较大时,kd取值应较小些。
偏差变化率|ec|的大小表明偏差的变化率,|ec|值较大,kp取值越小,ki取值越大[3]。
针对矢量控制的转速控制,在模糊规则中,偏差e、偏差变化率ec和修正系数kp、ki、kd语言变量值取{NB,NM,NS,ZO,PS,PM,PB},e和ec的论域均为(-6,6),kp、kd的论域均为(-1,1),ki的论域为(-0.5,0.5),隶属函数呈三角分布。
为了获得精确的控制量,要求模糊方法能够很好地表达输出隶属函数的计算结果。本系统采用工业控制中广泛使用去模糊方法之一的加权平均方法。该方法针对论域中每个元素xi,以它作为待判决输出模糊集合的隶属度u(i)的加权系数,即取乘积xiu(i),再计算该乘积和∑xiu(i)对于隶属度和的平均值x0,为
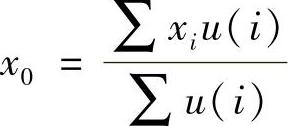
即平均值x0便是应用加权平均方法为模糊集合求得的判决结果。最后用输出量化因子乘以x0,从而得到控制量的实际值。
输入到PID控制器的实际参数则为
4.仿真结果及分析
设定异步电动机参数为:额定功率Pn=500W;额定相电压Un=127V;极对数pn=2;定子电阻Rs=4.495Ω;转子电阻Rr=5.365Ω;定子电感Ls=0.165H;转子电感Lr=0.162H;互感Lm=0.149H;转子转动惯量,J=0.00095kg·m2;粘滞阻力系数B=0。电流控制器滞环宽度为h=0.2A;直流母线电压为Udc=350V;系统中积分器与传递函数离散化采样周期为Ts=2μs。设定转速控制器kp=10、ki=26,kd=10。
通过MATLAB/Simulink对电动机矢量控制进行建模,对异步电动机进行空载变速及恒速加载运行仿真。图7-11和图7-12为电动机空载条件下运行时的仿真曲
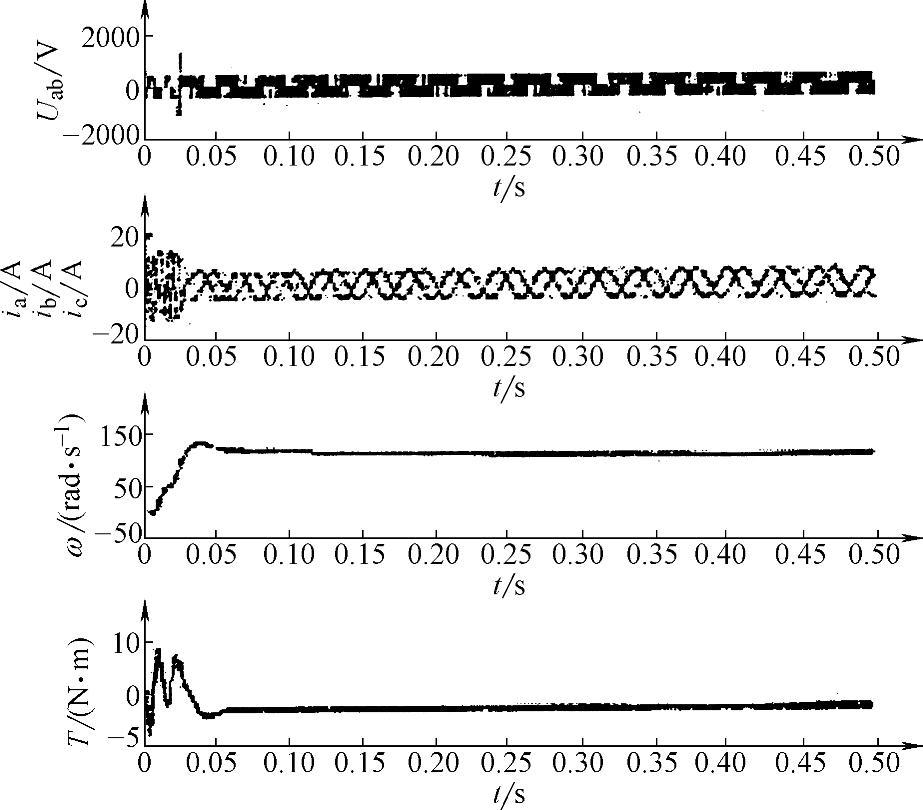
图7-11 转速控制器为普通PID且不带负载时各参数波形
线,达到稳定输出状态,电动机转矩在0.06s时保持为零。从图7-12中可看到,当转速控制器为模糊PID时,电动机转速在0.25s时即达到稳定输出状态,电动机转矩在0.04s时即保持为零。
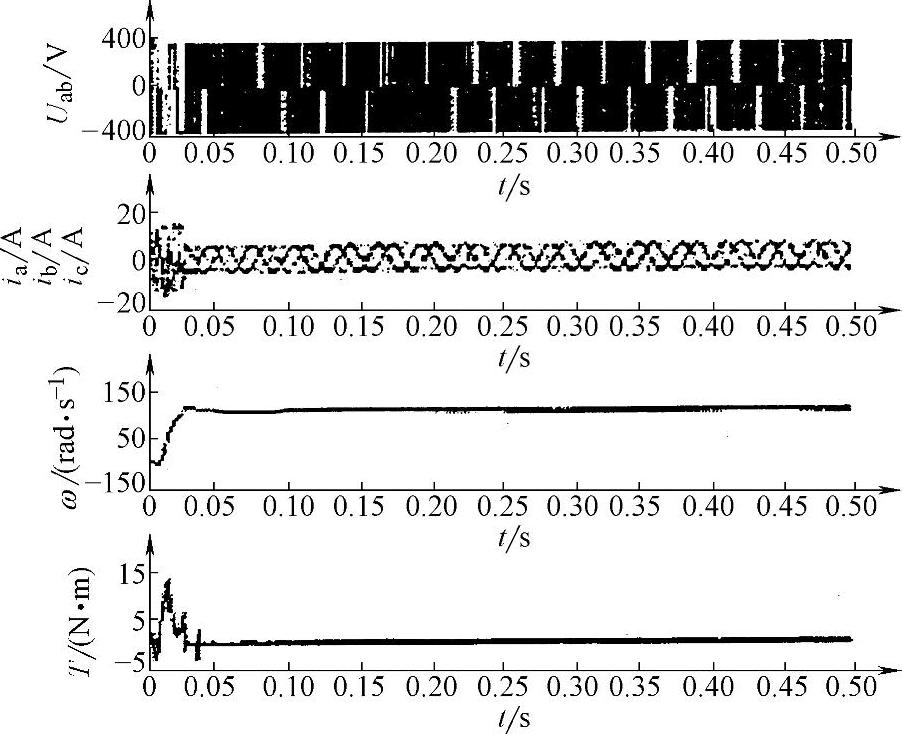
图7-12 转速控制器为模糊PID且不带负载时各参数波形
从图7-13中可以看出,普通PID加入负载时,电动机转速存在一个明显的瞬时跌落过程,转速在0.8s中达到稳定,电动机转矩约在0.5s时输出保持稳定。
而在图7-14中,模糊PID加入负载时,电动机基本上保持原来转速,瞬时跌落不明显,电动机转矩约在0.4s时输出保持稳定。
仿真结果表明,模糊PID的动态响应快,稳态跟踪精度高,转矩具有瞬时响应特性。当电动机功率越大,所带的负载越大,其效果将更加明显。
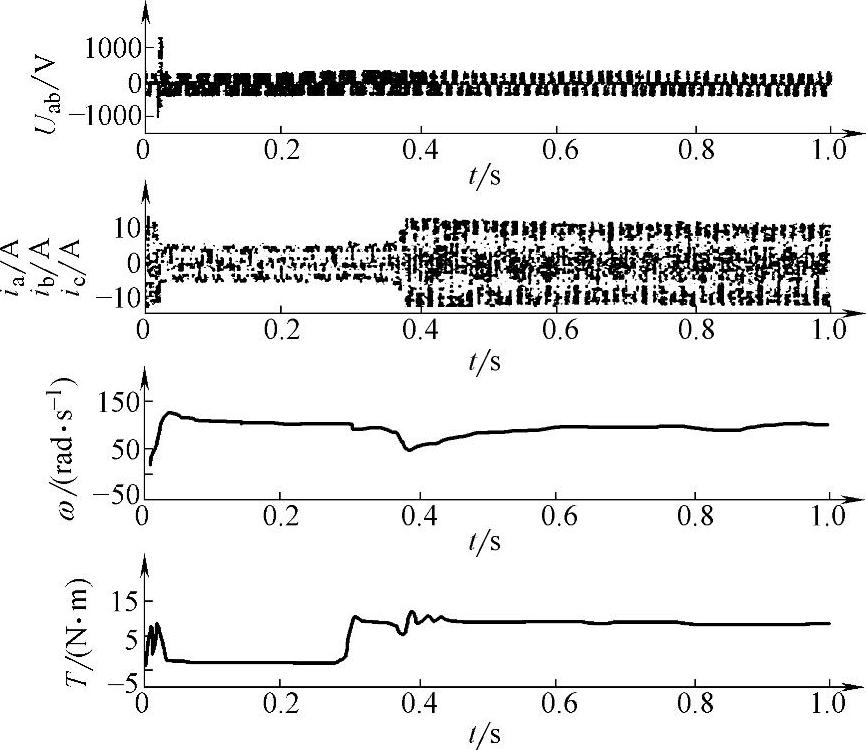
图7-13 转速控制器为普通PID且带负载时各参数波形
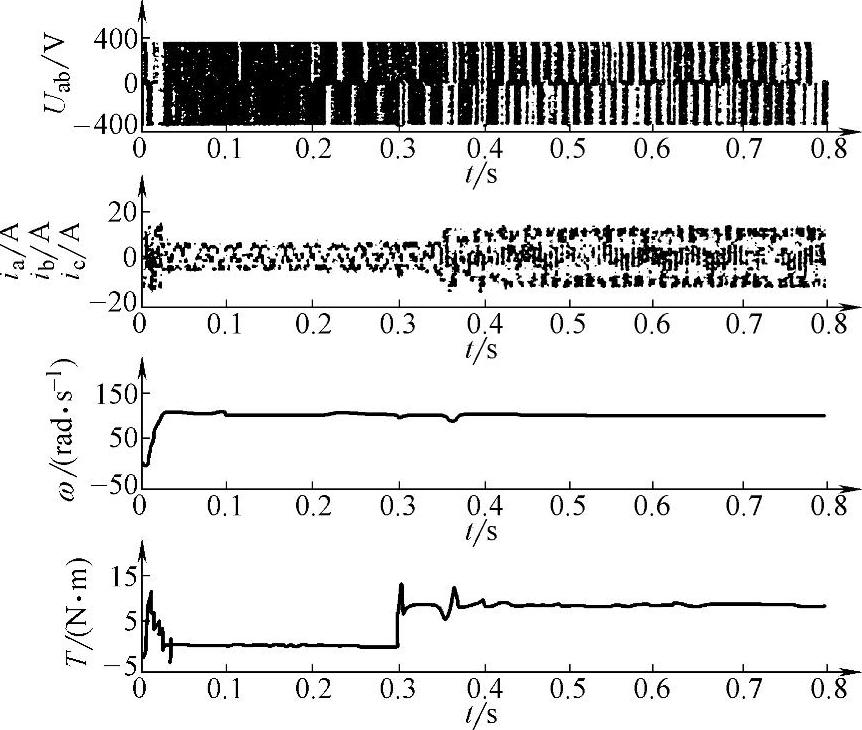
图7-14 转速控制器为模糊PID且带负载时各参数波形
5.结语
将传统的PID控制器与先进模糊控制相结合,既保持了传统PID控制器结构简单的优点,又把模糊控制有效地应用到了PID参数调节中,实现了系统的最优控制。仿真结果证明,采用模糊PID控制,系统的响应速度加快,调节精度提高,稳态性能变好,而且没有超调和振荡,具有较强的鲁棒性,这是普通PID控制难以实现的。它在非线性、时变的系统中有着广泛的应用。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。