



应用遗传算法的神经网络的基本原理是用遗传算法(GA)对神经网络的连接权值进行优化学习,利用GA的寻优能力来获取最佳权值。目前已有许多成功的应用,现列举两个例子。
1)求解短期地震预报问题。在改进的MGA中,采用了自适应交叉率和变异率,并且把GA和BP结合起来。预报用三种算法:BP、实数编码遗传算法(GA)、改进型GA(MGA)。图5-10给出了三种方法的比较结果。

图5-10 三种方法的比较
算法参数:网络选用三层BP网络,前一年的最大震级、最大震级之差、累计能量及累计能量之差为网络的输入,网络的输出是下一年的震级,隐含层节点数为30,这个4—30—1网络共有150个可调权值,各层的激发函数均为Sigmoid型函数。BP算法中,学习率η=0.7;惯性系数α=0.2。实数GA中,群体容量n=40,交叉率PC=0.12,变异率Pm=0.1,亲代度量S=0.9,各参数在算法运行过程中保持不变。MGA中,常量kc=0.1,km=0.11。
由实验结果可以看出,遗传算法具有快速学习网络权重的能力,并且能够摆脱局部极小点的困扰。
2)应用于优化基于神经网络结构的控制器的参数。应用神经网络构成一个控制器,用于控制有纯滞后的对象,整个控制系统结构如图5-11所示。

图5-11 控制系统结构
系统采用三层神经网络结构作为控制器,即输入层、隐含层、输出层,根据有关公式与经验,输入层维数n定为2(输入误差e及误差率ec),输出层维数m为1(输出控制量y),隐含层维数n1定为8。由此构成的神经网络控制器的结构中,共有24个权值需确定。BP网络权值的训练算法中,引用GA作为权值优化方法,根据实际应用情况,选用以下的GA的具体实现形式:
1)由于神经网络的权值为实数,所以解空间采用二进制编码。
2)引入精华策略,即每代都保留父代中几个最优解,以保证搜索过程收敛。
3)引入均匀交叉算子,以求得全局最优解。
其他操作则采用简单的GA的形式。
为了说明神经网络结构的控制和GA参数训练的有效性,选取经典控制问题中较为典型的一阶纯滞后对象进行实验。对象模型为(https://www.xing528.com)
式中,时间常数T=1,增益系数K=0.5。采用MATLAB语言编程,分别对系统的定值控制、抗干扰性和鲁棒性进行了仿真实验,结果如图5-12所示。
1)在阶跃输入的情况下,输出响应曲线如图5-12所示。结论:从仿真结果可见,系统动态过程较平稳,超调量小,过渡过程时间短,且静态误差小。说明经过训练后,模糊控制器能达到较好的性能。
2)抗干扰实验:在t=20时加入单位脉冲干扰信号,仿真结果如图5-13所示。

图5-12 阶跃输入下输出响应曲线
结论:从仿真结果可见,在脉冲干扰作用后,系统能快速、平稳地恢复稳定状态,说明系统抗干扰能力强。
3)鲁棒性实验:改变对象的参数,以检验GA优化后的神经网络控制器的适应性,仿真结果如图5-14所示。
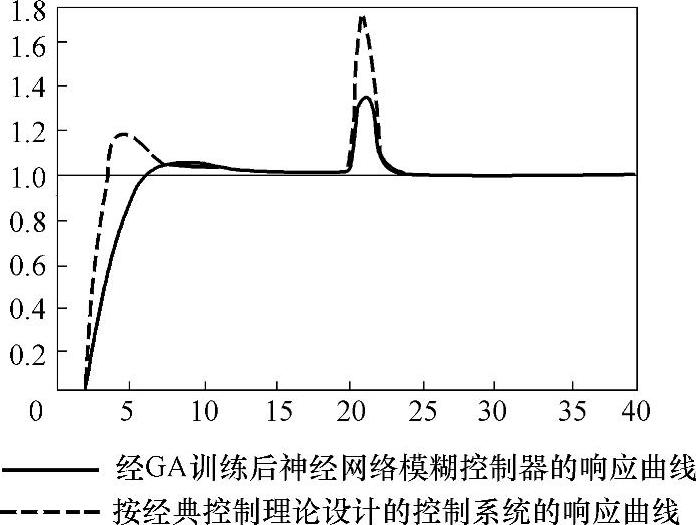
图5-13 单位脉冲干扰信号作用响应曲线
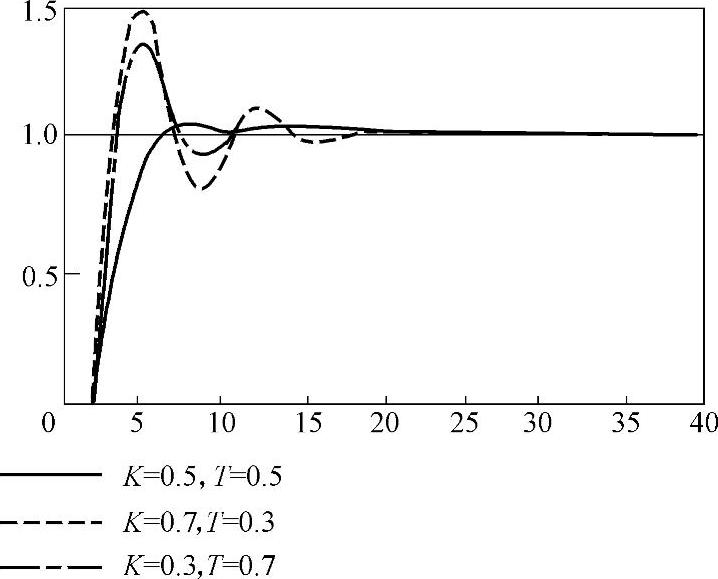
图5-14 K、T变化响应曲线
结论:从仿真结果可见,对象参数改变,对仿真曲线影响不大。说明系统对不同对象适应性强,有较好的鲁棒性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。