



【摘要】:采用遗传算法进行PID三个参数的整定,具有以下优点:1)与单纯形相比,遗传算法同样具有良好的寻优特性,且它克服了单纯形参数初值的敏感性。遗传算法应用于数字PID控制器。图5-9 遗传算法PID控制系统参数整定的基本思想是:在寻优时,先对PID参数进行编码,按一定模初始化一个种群,种群中的每一个体代表一个可能的解。
采用遗传算法进行PID三个参数的整定,具有以下优点:
1)与单纯形相比,遗传算法同样具有良好的寻优特性,且它克服了单纯形参数初值的敏感性。在初始条件选择不当的情况下,遗传算法在不需要给出调节器初始参数的情况下,仍能寻找到合适的参数,使控制目标满足要求。同时单纯形法难以解决多值函数问题以及在多参数寻优中,容易造成寻优失败或时间过长,而遗传算法的特性决定了它能很好地克服以上问题。
2)与专家整定法相比,它具有操作方便、速度快等优点,不需要复杂的规则,只通过字串进行简单的选择、交叉、变异,便可达到寻优。避免了专家整定法中前期大量的知识库整理工作及大量的仿真实验。
3)遗传算法是从许多点开始并行操作的,在解空间进行高效启发式搜索,克服了从单点出发的弊端以及搜索的盲目性,从而使寻优速度更快,避免了过早陷入局部最优解。
4)遗传算法不仅适用于单目标寻优,而且也适用于多目标寻优。根据不同的控制系统,针对一个或多个目标,遗传算法均能在规定的范围内寻找到合适的参数。(https://www.xing528.com)
遗传算法作为一种全局优化算法,得到了越来越广泛的应用。近年来,在PID控制系统的应用也越来越多。其结构如图5-9所示。遗传算法应用于数字PID控制器。
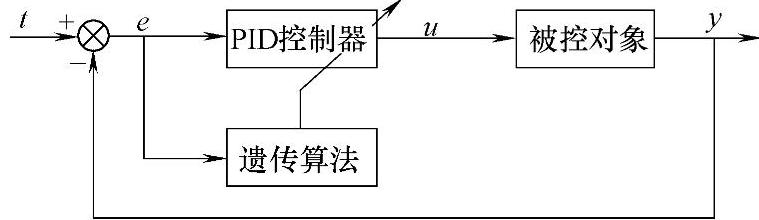
图5-9 遗传算法PID控制系统
参数整定的基本思想是:在寻优时,先对PID参数进行编码,按一定模初始化一个种群,种群中的每一个体代表一个可能的解。然后根据适值函数,计算每一个体的适值,并以此控制再生操作,之后按一定的概率对种群进行交叉、变异操作。这样种群不断进化,直至寻优结束。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。