



在传统的模糊控制中,为实现简便性和快速响应性,通常采用E和EC作为模糊控制器的输入,因而,具有类似于传统PID控制器的作用,根据线性控制理论,有可能获得良好的动态特性,但无法消除静态误差。为了克服此种缺点,可采用下述模糊控制方法。
1.具有积分因子的模糊控制系统
图3-15所示为Braae和Rutherford于1978年提出的具有积分因子的模糊控制系统。积分环节设置在误差输入的模糊化之前和控制量解模糊化之后,它表达的是一个非线性系统,x1=e,x2=f(x1,e),u=x2。尽管可以在一定程度上减小静差,但是无法保证消除极限环振荡现象,当k1和k2取得很大时,有可能造成系统的不稳定。
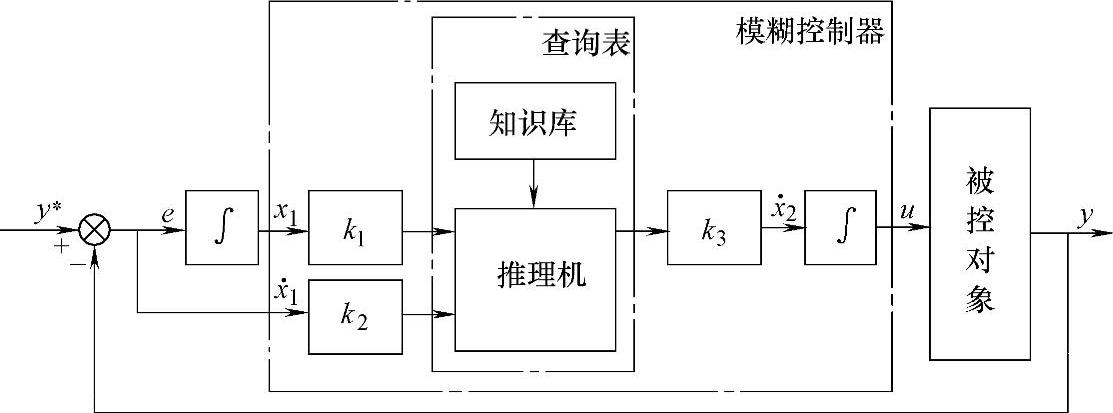
图3-15 带积分环节的模糊控制系统
2.混合型模糊PID控制器
图3-16所示的混合型模糊PID控制器是W.L.Bialkowski在1983年提出的方案。它由一个常规的积分(I)控制器和一个二维模糊控制器并联而成,最终控制器的输出是积分控制器输出ui=ΚΙ∑jej和模糊控制器的输出uf=f(e,ec)之和,即u=ui+uf。由于误差e(t)是连续变化的,因此,ui也是连续量。这种混合型模糊PID控制器不仅可以消除极限环振荡,而且还可完全消除系统的静差(e→0),使系统成为无静差的模糊控制系统。
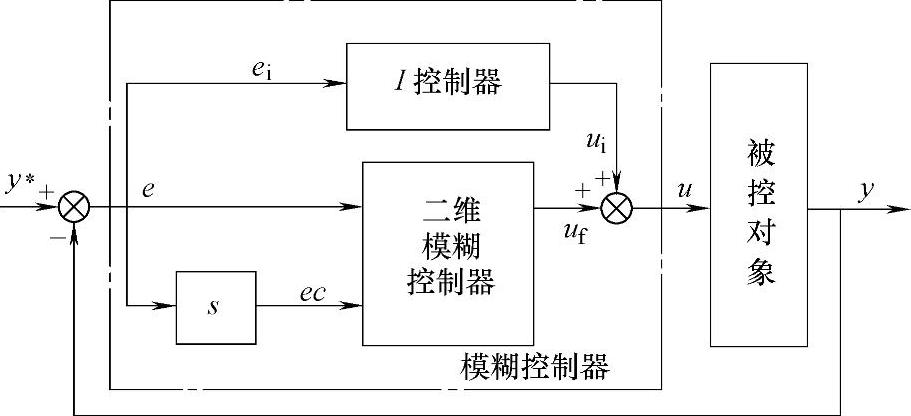
图3-16 混合型模糊PID控制器
3.误差模糊积分的PID模糊控制器
图3-17所示是M.Basseville提出的另一种PID模糊控制器,误差e的模糊值经积分后与常规模糊控制器的输出进行叠加而构成控制器的最终输出。设y∗表示系统输出y(t)的给定值,当系统进入“模糊稳定”状态时期最小允许误差是δ,即此时允许系统输出范围是[y∗-δ,y∗+δ]。相应地,对应于y∗的控制量是u,即uy=y∗=u,而uy=y∗-δ=uL,uy=y∗+δ=uH,那么,这种模糊积分要消除极限环振荡的必要条件是

式中 ufmin——模糊控制器输出的最小非零绝对值。
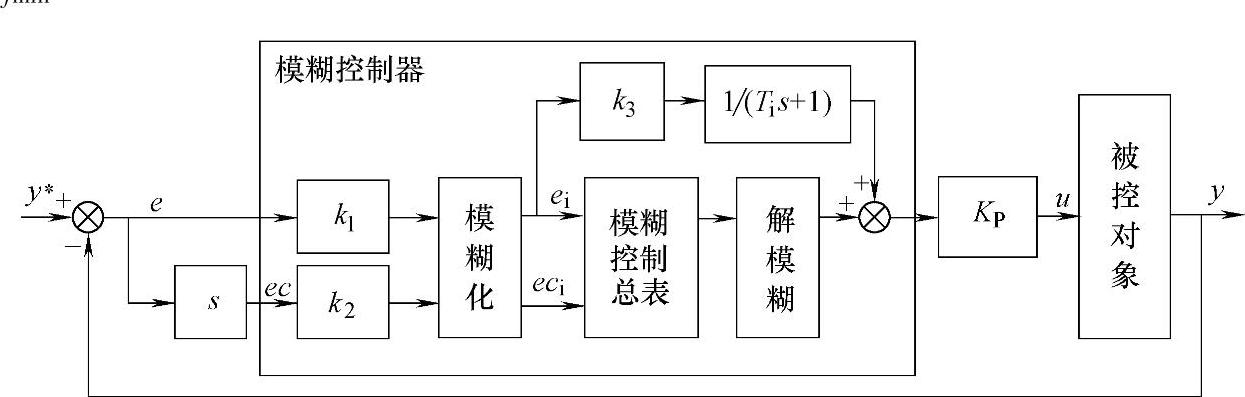
图3-17 误差e模糊积分的PID模糊控制器
这种对误差e的模糊值进行积分的PID模糊控制器可以消除大的系统静差,但是要减小零点附近的极限环振荡,必须增加控制规则数,这样也就增加了系统设计的复杂程度。
4.传统PID控制器参数的模糊自整定
传统PID控制器的参数(kp,ki,kd)在不同的工况下一般应该有所不同,才能取得好的控制效果,这就要求PID控制器具有参数自整定功能。利用模糊控制规则在线地对PID参数进行自动修正,就形成了模糊自整定策略,这样的控制系统可由图3-18来说明。
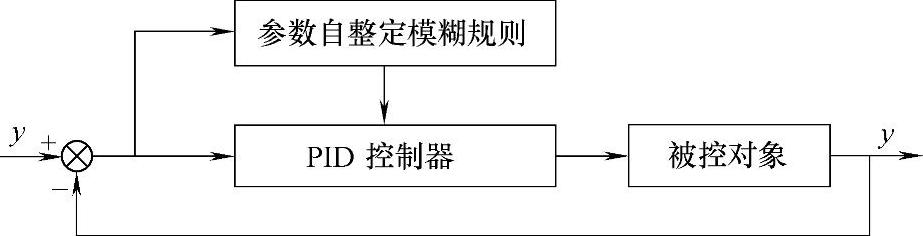
图3-18 参数模糊自整定的PID控制器系统
该系统设计的关键是要先找出参数(kp,ki,kd)与误差e和误差改变量Δe之间的模糊关系。具体地,在系统运行中不断检测e和Δe,根据模糊控制原理对三个参数进行在线修正,以满足不同工况(表现为e和Δe)下,对(kp,ki,kd)的不同要求,最终获得良好的动态和静态控制性能。总结以往控制系统的设计经验,可以得到参数(kp,ki,kd)与e和Δe的关系大致如下:
① 当|e|较大时,kp应较大,而kd应较小,这样可使系统响应加快,并令ki=0以免出现过大的超调量;
② 当|e|中等时,kp应较小,使超调量较小,kd和ki的取值适当,需特别关心kd的取值,因为它对系统响应的影响较大;
③ 当|e|较小时,kp和ki应较大,使系统具有较好的稳态性能,同时kd应适当,避免在平衡点附近出现振荡。
根据以上分析,把误差和误差改变量的绝对值分割成三个模糊子集,表示这“大”(L)、“中”(M)、“小”(S),其隶属函数分别如图3-19a、b所示,其形状可以通过参数a1a2a3和b1b2b3来调整。
根据|e|和|Δe|的不同组合,和需要得到相应工况下的参数自整定规则。以下是某种组态下的PID参数自整定的模糊控制规则:
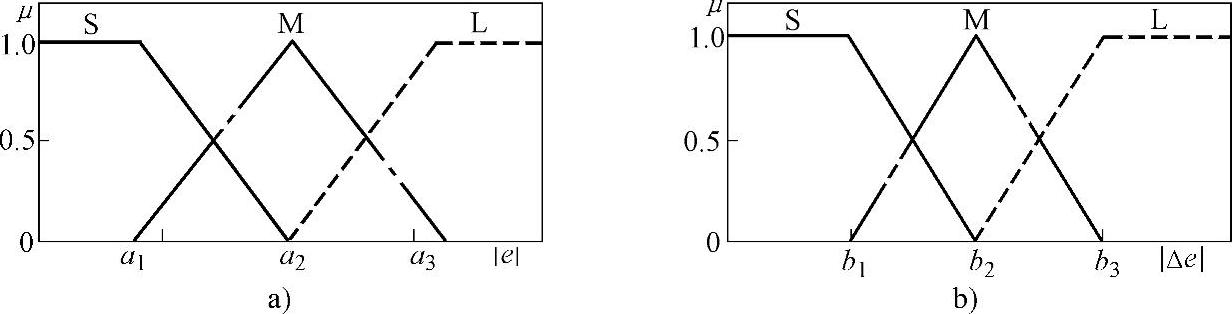
图3-19 语言变量e和Δe的隶属函数
a)μ(e) b)μ(Δe)
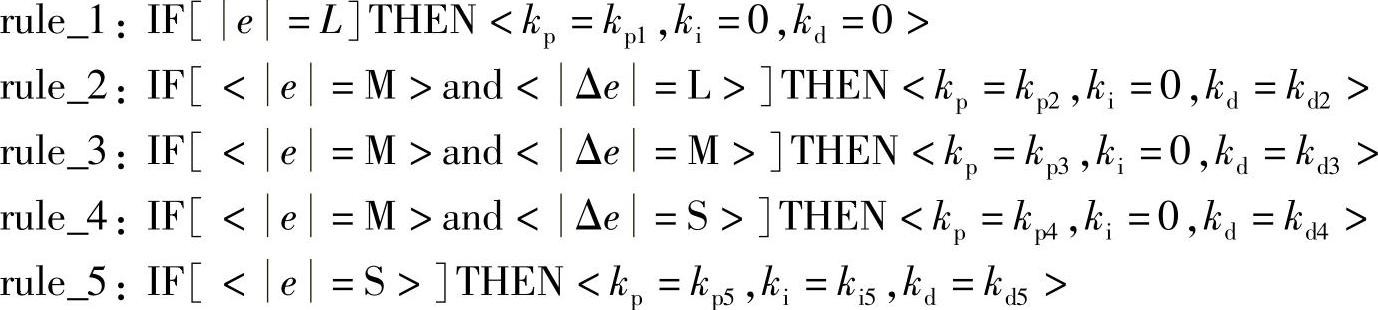
其中,kp1~kp5、ki1~ki5和kd1~kd5分别是e和Δe的某些组合时的kp、ki、kd参数值,它们是通过传统的PID参数整定法获得的。依此类推,可以得到e和Δe在其他组态下的参数自整定模糊规则。
5.对传统PID控制器三个参数进行实时调整
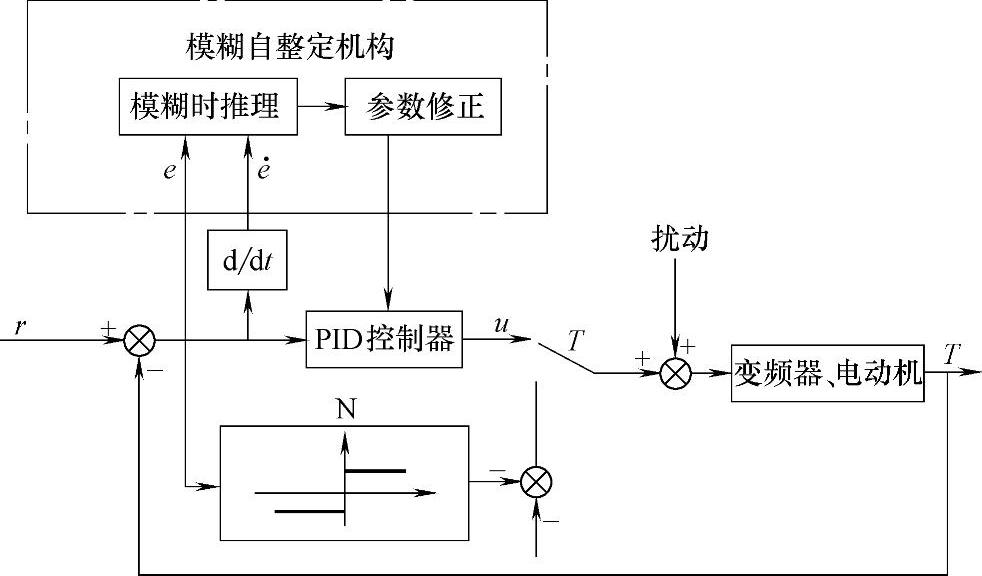
这种模糊控制类似上述方法,适用于多输入单输出的控制器,输入为速度偏差e和速度偏差变化率ec,输出为电流给定u,其框图如图3-20所示,控制对象是变频器和电动机。
 (https://www.xing528.com)
(https://www.xing528.com)
图3-20 模糊控制PID控制器框图
(1)模糊化过程
由于输入量偏差和偏差变化率均是精确量,必须模糊化、离散化,变成设定整数论域中的元素。针对调速的范围大、精确度要求高的特点,取速度偏差E和速度偏差率EC为输入语言变量,电流给定U为输出语言变量,并将E、EC、U的模糊集和论域分别定义于下:
E的模糊集为{NB,NM,NS,NO,PO,PM,PB}
EC的模糊集为{NB,NM,NS,ZO,PM,PB}
E的论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
EC的论域为{-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7}
其中,变量E区分了NO和PO主要是着眼于提高稳态精度。
(2)模糊控制规则的确定和推理
模糊控制规则是专家的经验和操作者的技能加以总结而得出的模糊条件语句的集合,确定模糊控制规则必须保证控制器输出能够使系统的动稳态特性达到最佳,这里采用“Mamdani”型推理法。
(3)解模糊化
通过模糊推理得到的输出是一个模糊集合,在实际使用中,要用一个确定的值才能去控制执行机构,这就需要解模糊处理,解模糊判决方法很多,现采用加权平均法(centrod)。
(4)仿真及结论
仿真和实验表明:采用模糊PID控制算法后调节精度提高,没有超调和振荡,这是传统PID控制难以实现的;而且模糊PID控制器的控制模型只是一些简单的模糊规则语句,即可完全描述,易于在微处理器上通过查表实现,实用性很强。
6.直接对系统的控制量进行模糊调整
(1)PID算法
此种模糊控制的PID控制思想是将偏差的比例、积分和微分三个参数通过线性组合,构成控制器,对被控对象(电动机)进行控制,其结构如图3-21所示。
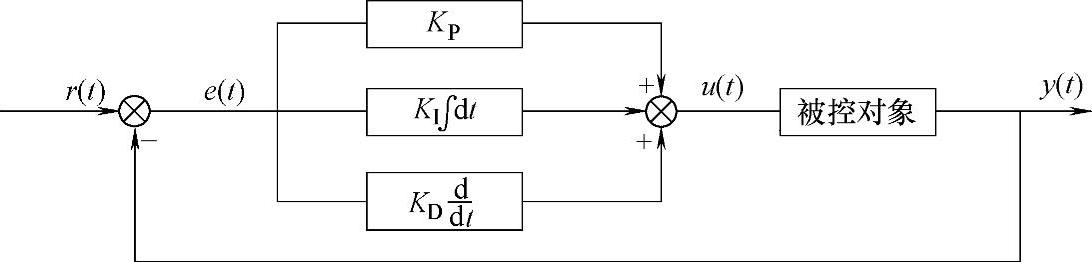
图3-21 模糊PID控制器
PID控制算法可用下列式子表述:

式中 KP——比例系数;
TI——积分时间常数;
TD——微分时间常数。
PID控制器的离散化算式为

式中 KI——积分系数;KI=KPT/TI;
KD——微分系数,KD=KPTD/T;
T——采样周期。
(2)模糊PID控制器的设计
1)输入输出语言变量的确定:参照模糊控制器的设计方案,模糊PID控制器输入语言变量为E、EC,输出语言变量分别为比例系数Kp,积分系数Ki,微分系数Kd。
2)建立Kp、Ki、Kd、模糊控制规则表:根据操作者实际操作经验,可建立Kp、Ki、Kd模糊控制规则表。
3)求模糊控制器输出:应用模糊推理合成规则,由系统偏差和偏差变化量的量化论域,根据输入语言变量偏差E和偏差变化率EC,求出相应输出语言变量的kp、ki、kd模糊集合;应用最大隶属度法对此模糊集合进行判决,可求出精确值kp、ti、td,将kp、ti、td代入式(3-33)乃可求出k时刻加到被控制系统的控制量u(k)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。