



为了了解模糊控制各个步骤的运算,现以交流电动机调速稳定给定转速为例。这是一个单变量一维模糊控制系统,只有一个输入量误差e和一个输出量,控制系统如图3-14所示。设电动机由变频电源供电,电动机转速由改变频率控制,电动机要求转速恒定。运行时因负载关系,转速发生变化,由电源改变频率来纠正。转速升高时,频率降低;反之转速降低时,频率升高,最终保持转速恒定于某一数值。这种控制由转速偏差来控制,设要求恒定转速为n0,实际转速为n,则偏差e。
e=n0-n
e为模糊控制器的输入量,可正可负,频率f为输出量,可高(正)可低(负)。
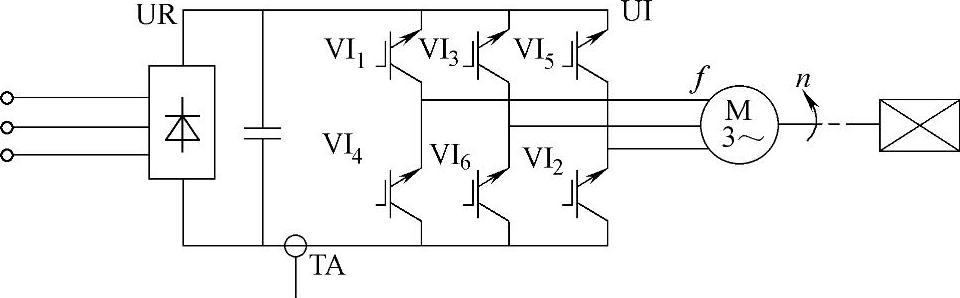
图3-14 稳速系统
控制方法及步骤如下:
1.输入量和输出量的模糊化
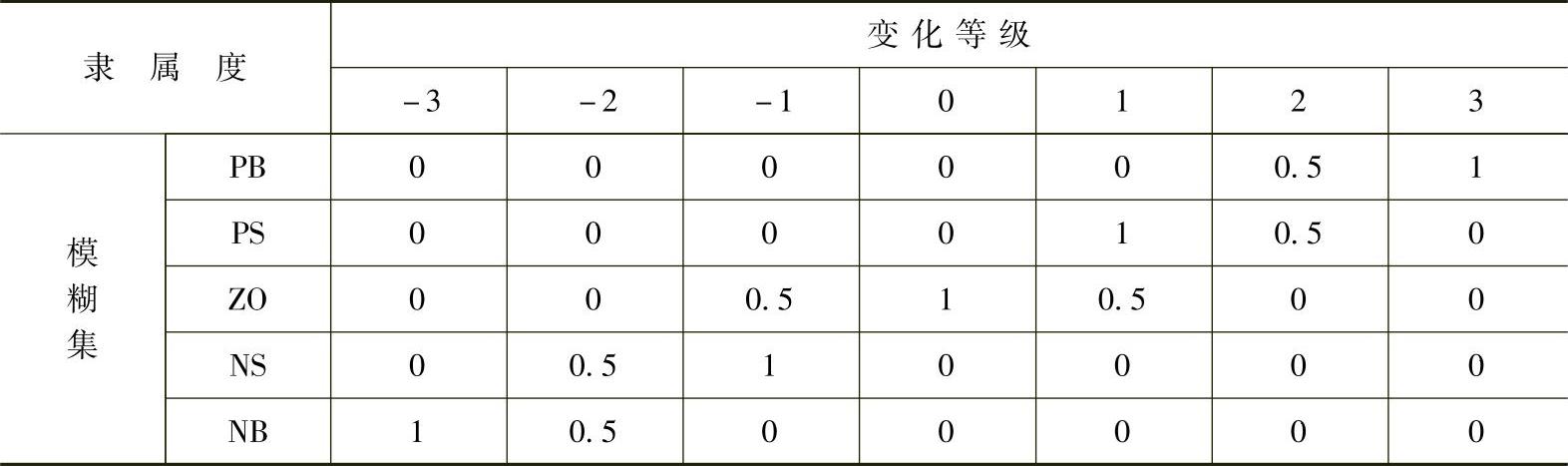
按照量化因子的转换原则,将偏差e分为5个模糊集:负大(NB),负小(NS),零(ZO),正小(PS),正大(PB)。将偏差e的变化范围分为7个等级:-3,-2,-1,0,+1,+2,+3,从而得到转速变化模糊表,见表3-4。
表3-4 转速变化e划分表
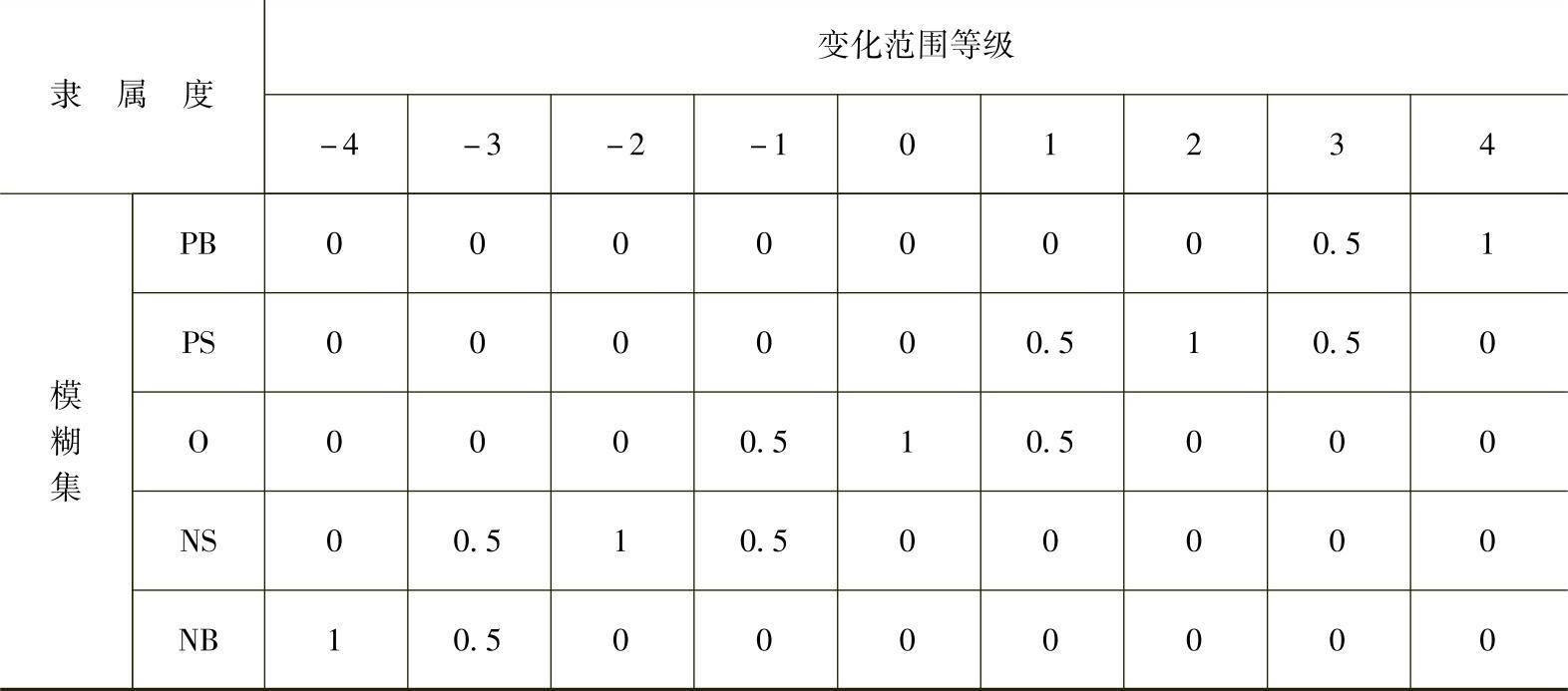
控制量u为频率的变化。将其分为5个模糊集:负大(NB),负小(NS),零(ZO),正小(PS),正大(PB)。将f的变化范围分为9个等级:-4,-3,-2,-1,0,+1,+2,+3,+4,得到控制量模糊划分表,见表3-5。
表3-5 控制量f模糊划分表
2.模糊规则的描述
根据日常的经验,设计以下模糊规则:
(1)“若e负大,则f负大”;
(2)“若e负小,则f负小”;
(3)“若e负零,则f负零”;
(4)“若e正小,则f正小”;
(5)“若e正大,则f正大”;
其中,频率降低时f为负,频率升高时f为正。
将上述规则采用“IF A THEN B”的形式来描述,则模糊规范表示为
(1)IF e=NB THEN f=NB
(2)IF e=NS THEN f=NS
(3)IF e=ZO THEN f=ZO
(4)IF e=PS THEN f=PS(https://www.xing528.com)
(5)IF e=PB THEN f=PB
根据上述经验规则,可得模糊控制规则表,见表3-6。
表3-6 模糊控制规则表

3.求模糊关系
模糊控制规则是一个多条语句,模糊关系R为(参看式(3-25),Ri=Ai×Bi)
R=(NBe×NBf)∪(NSe×NSf)∪(ZOe×ZOf)∪(PSe×PSf)∪(PBe×PBf)
其中规则内的模糊集运算取交集,规则间的模糊集运算取并集,即
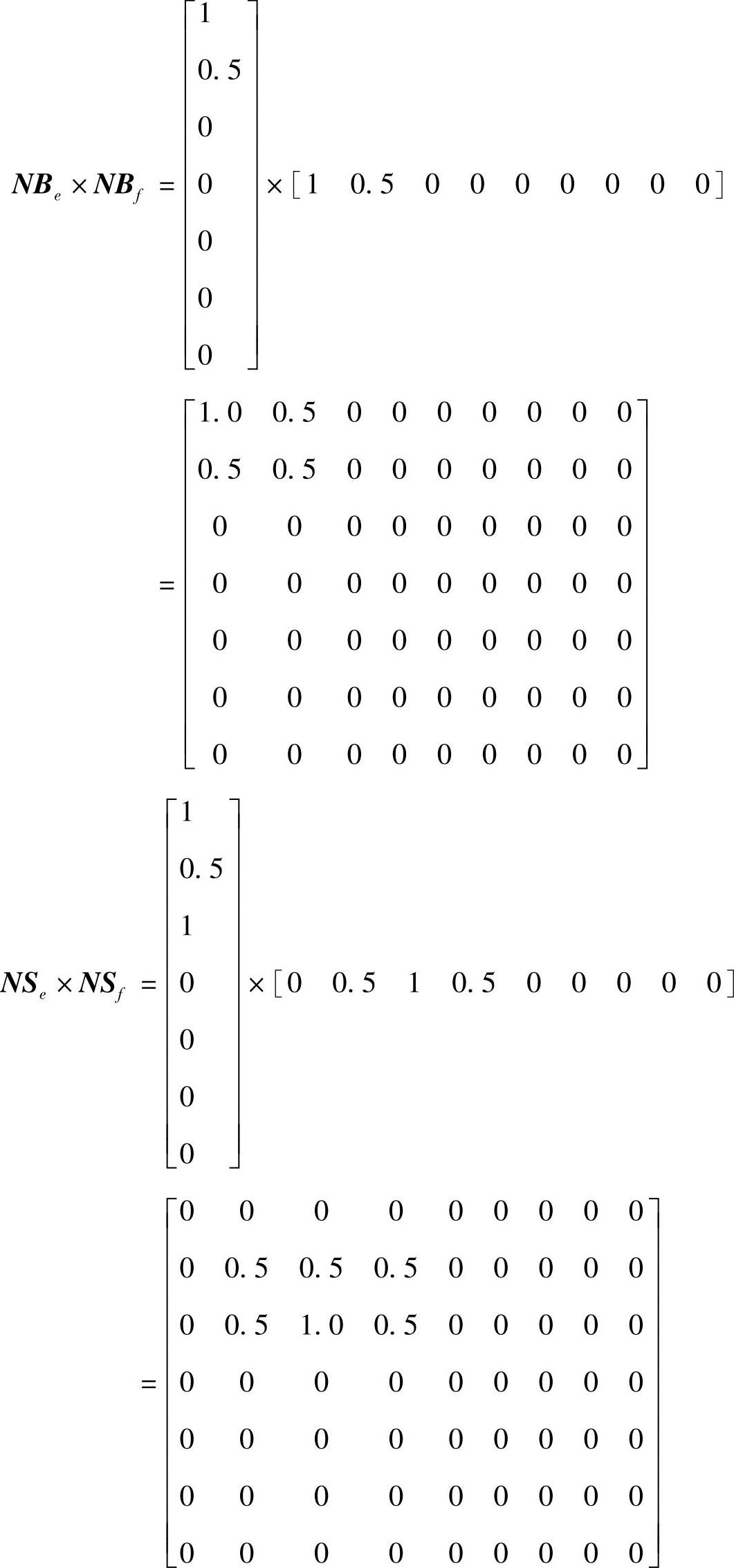
由以上5个模糊矩阵求并集,得
4.模糊决策
模糊控制器的输出为误差向量和模糊关系的合成,即f=e▫R
设当误差e为NB时,e=[1.00.5000000],则控制器输出为f=e▫R=[10.500000]▫

5.控制量的解模糊化
由模糊决策可知,当误差为负大时,实际转速远高于要求稳定值,e=NB,控制器的输出为一模糊向量(模糊集),可表示为

如果按照“隶属度最大原则”进行解模糊化,选择控制量为f=-4,即频率应降低一些,转速减低。
按照上述步骤,进行仿真,可得到模糊系统的规则库,并可实现模糊控制的动态仿真。模糊控制响应表见表3-7。取偏差e=-3,得f=-4。
表3-7 模糊控制响应表

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。