



模糊控制器的输入量,即误差e和误差变化率ec。
输入量精确值模糊化有一个量化因子问题,输入误差和误差变化率实际上是连续的,变化范围即论域为
U={-n,-n+1,…,-1,0,1,…,n-1,n}
但采用模糊控制时,要把论域离散化成为几个量化等级,因此存在一个量化问题,就是说要用一个量化因子进行论域转换。
例如身高,可表示为
身高=(1.2,1.4,1.6,1.7)
要把它们模糊化为较矮,矮,中等,高,较高等等级,则哪个属于矮,哪个属于较高,就有一个转化问题。
设在模糊论域为{-e,e}或{-ecec}中,取一个转化系数叫做量化因子和比例因子k
ke=n/ekec=n/ec,ku=n/u
ke、kec为输入量化因子
ku为输出比例因子,模糊控制经过反模糊化后得到的量化等级n与比例因子ku的乘积即为实际的输出量。应注意的是,k值若取得过大,就会造成被控过程阻尼程度下降;相反,若取得过小,将使被控过程的响应特性迟缓。
为了实现模糊控制器的标准化设计,目前在实际中常用的处理方法是Zadeh提出的方法,将偏差e和ec的变化范围设定为[-6,+6]区间连续变化量,使之离散化,构成含7个整数元素的离散集合:即正大、(PB)、正中(PM)、正小(PS)、零(0)、负小(NS)、负中(NM)和负大(NB)等这7个语言值来描述。有时将零分为正零(PO)和负零(NO)两个值,以表示误差变化在当前是增加趋势还是减小的趋势。这样就构成了8个语言变量值{NB、NM、NS、PO、NO、PS、PM、PB},当语言变量为7个时,这些语言变量称为模糊子集,隶属函数、模糊集合如图3-8所示,横轴表示变化范围。
各个语言变量模糊子集的取值一般采取:
正大(PB)+4~+6(https://www.xing528.com)
正中(PM)+2~+6
正小(PS)0~+4
零(0)-2~2
负小(NS)-4~0
负中(NM)-6~-2
负大(NB)-6~-4
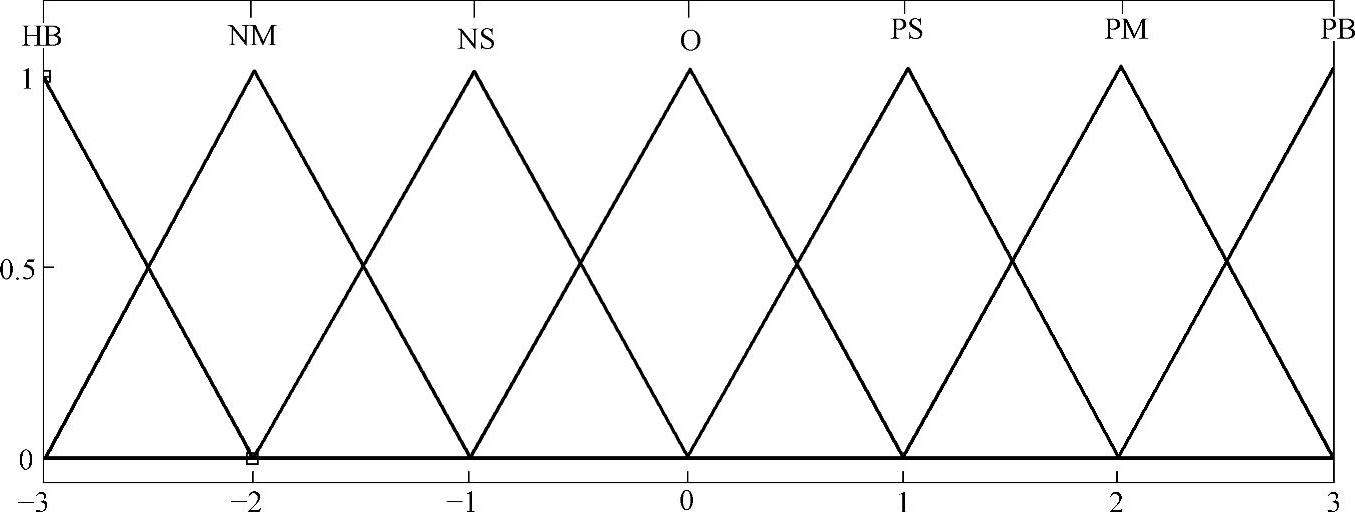
图3-87 个三角隶属函数语言值的模糊集合
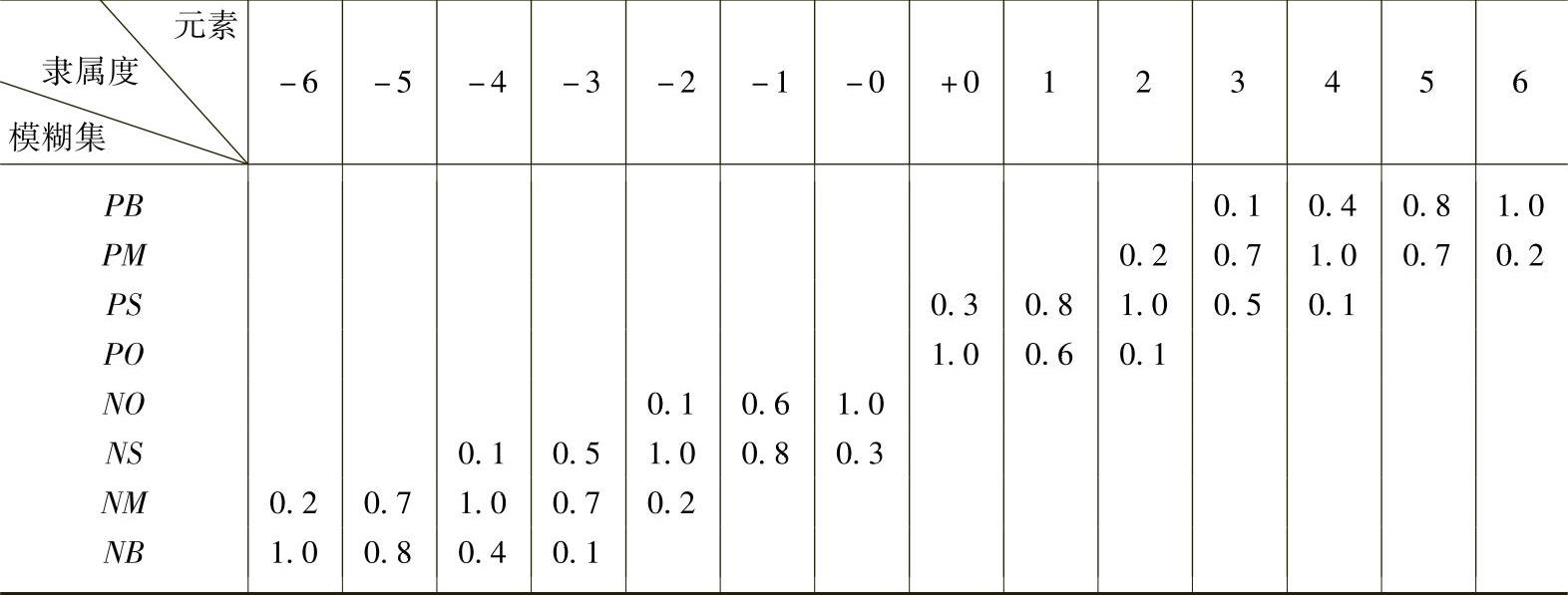
表3-1为元素从属于8个模糊子集的隶属度参考表。在实际工作中,精确输入量的变化一般不会在[-6,6]之间,如果其范围是在[a,b]之间的话,可以通过变换计算

将X在[a,b]之间变换的变量转换为[-6,6]之间变化的变量。
表3-1 模糊子集的隶属度
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。