



变频传动系统的运行状况是由电动机的机械特性与生产机械的负载转矩特性共同决定的,即由这两种特性的配合决定的。下面来讨论这两种特性的配合问题,即系统的静态稳定运行条件。
在变频传动系统运行时,电动机的机械特性与生产机械的负载转矩特性是同时存在的,为了便于分析,可以把两条特性画在同一坐标平面上。如图1-33所示,特性1为异步电动机的机械特性n=f(M),特性2为恒转矩负载特性n=f(ML)。
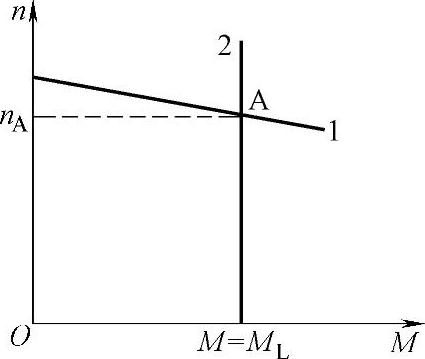
图1-33 系统稳定运行的工作点
根据传动系统的运动方程式,当电动机的电磁转矩M与负载转矩ML方向相反(即都为正)、大小相等时,dn/dt=0,转速为某一稳定值,此时系统处于稳定运行状态。图中,两条特性线的交点A处,所对应的转矩为M=MA=ML,系统以转速nA恒速运行,可见,电动机的特性线与负载的特性线的交点A就是系统的运行点,此时系统处于平衡状态。这时若出现某种干扰(如电网电压的波动、负载转矩的瞬时冲击等),会使原来为的平衡状态遭到破坏,电动机的转速发生变化。若干扰消失后,系统能自行恢复到原点处继续运行,则说明此系统在该点的运行中是稳定的。相反,若干扰消失后,系统不能回到原来的平衡点,则系统在该点的运行是不稳定的。
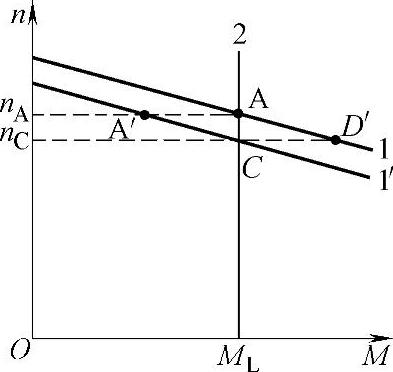
图1-34 稳定运行情况
运行点是否稳定,决定于系统中生产机构与电动机两条特性的配合。(https://www.xing528.com)
在图1-34所示情形中,假设系统原来运行于A点,转矩处于平衡。若这时出现瞬时扰动,电源电压突然由额定电压UN下降到UN+ΔU=U′(对应的机械特性1′与特性1相平行,其间的距离取决于ΔU的大小)。在电压突变的瞬间,由于系统机械惯性的影响,转速n和电枢电动势Ea来不及变化,工作点由A跳变到对应于电压为U′的机械特性上的A′点,与之对应的电磁转矩M和电枢电流I。都突然减小, 使系统减速,即U↑→Ia↑→M↑→n↑,最后稳定运行于C点;当电压恢复到UN,同样认为在U↓瞬间,转速n不变,工作点由C瞬间转移到UN特性上的D点,此时M>ML,dn/dt>0系统将减速,即U↑→Ia↑→M′↑→n↑,最后返回到A点运行。同理,当电源电压突然上升,使转速升高,运行点A″处也是稳不住的,扰动消失后(即电源电压恢复到UN),系统又会自动回到A点运行。可见,这种情况下,系统在A点的运行是稳定的。综上所述,带恒转矩负载的电动机,其机械特性具有向下倾斜的特性时,系统能稳定运行。
使系统减速,即U↑→Ia↑→M↑→n↑,最后稳定运行于C点;当电压恢复到UN,同样认为在U↓瞬间,转速n不变,工作点由C瞬间转移到UN特性上的D点,此时M>ML,dn/dt>0系统将减速,即U↑→Ia↑→M′↑→n↑,最后返回到A点运行。同理,当电源电压突然上升,使转速升高,运行点A″处也是稳不住的,扰动消失后(即电源电压恢复到UN),系统又会自动回到A点运行。可见,这种情况下,系统在A点的运行是稳定的。综上所述,带恒转矩负载的电动机,其机械特性具有向下倾斜的特性时,系统能稳定运行。
由于生产机械负载转矩ML也可能随转速n变化,故有必要把上述结论推广到包括所有类型的负载特性在内的一般情况。
进一步分析上述两种情况后可以看出:向下倾斜的机械特性与恒转矩负载特性的配合,实质上是电动机的电磁转矩对转速的变化率小于负载转矩对转速的变化率,即dM/dn<dML/dn。而上翘的电动机机械特性与恒转矩负载特性的配合,正好相反,即有dM/dn>dML/dn。
所以,变频传动系统在交点处(M=ML)能稳定运行的条件是

为满足上述条件,对于拖动恒转矩负载的电动机,要求其应具有略下垂的机械特性。而机械特性有可能出现上翘,这将使系统不能稳定运行。
同理,对于同步电动机特性与负载特性配合可用上述方法进行分析。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。