



1.转矩公式
从电机学得知,三相异步电动机的电磁转矩公式为
M=CMΦmI2′cosφ2按照三相异步电动机的T形等效电路,有
电磁转矩还有另一种表达式为

式中 E2′——转子电动势;
I2′——转子电流;
Φm——磁通;
cosφ2——转子功率因数;
CM——转矩系数;
f1——电源频率;
s——转差率;
U1——定子电压;
p——极对数,常用的为1、2、3、4对极;
X1、X2′——定子和转子电抗;
r1、r2′——定子和转子电阻。
由此可以看出,I2′和cosφ2均为转差率s的函数,故式(1-9)为三相异步电动机机械特性M=f(s)的一种隐函数表达式。由于式(1-9)具有较明显的物理含义,因此称为三相异步电动机机械特性的物理表达式。
三相异步电动机电磁转矩M的表达式,还可由电磁功率的另一种表达式推导得出。
根据三相异步电动机的简化等效电路可知:
由于 ,且n1=60f1/p
,且n1=60f1/p
式中 Pem——功率
Ω1——同步角速度(https://www.xing528.com)
所以可得

显然,式(1-10)反映了电磁转矩M与转差率s之间的函数关系。因此,它是三相异步电动机机械特性M=f(s)的又一种表达式。由于式(1-10)与定子电压、频率及电动机参数等有关,故称之为机械特性的参数表达式。
额定转矩MN可由电动机的额定功率和额定转速NN得到,即

过载能力是三相异步电动机的一项重要性能指标,它反映了电动机的短时过载极限。对于常用的Y系列三相异步电动机,KM=2~2.2。
2.转速公式

式中 n——转速(r/min);
f——电源频率(Hz);
p——极对数;
s——转差率,对异步电动机而言,1>s>0,对于同步电动机,s=0。
3.机械特性
(1)固有特性
描述异步电动机转矩与转速关系称为电动机的机械特性,当定子电压为额定电压Un,转差率为额定转差率sn时,电动机的机械特性称为固有机械特性,如图1-17所示。图中A为起动点,此时转子未转动,n=0、s=1,定子电流为起动电流,Mn为起动转矩,只有转矩M>Mn电动机才能转动。B为额定运行点,定子电压、电流、转矩和转速均为额定值;sn=0.01~0.09,曲线与n轴交点H为同步转速点,HB一段特性属于硬特性,运行时转速变化不大。P点为最大转矩点,此时M=Mmax,s=sm,n=nm。运行中,负载转矩ML不能大于Mmax,否则将造成堵转,故P点也称为临界运行点。
电动机的机械特性n=f(M)对于变频传动十分重要,因为生产机械能否正常运行而收到良好的效果,关键在于电动机的机械特性与负载的负载特性必须有良好的配合,方能稳定运行。
(2)人为特性
当电动机调速时机械特性发生变化,此时的机械特性称为人为的机械特性。
变频调速时的电动机机械特性如图1-18所示。从图可看到,频率调低、转速降低时,特性曲线逐渐变软,最大转矩逐渐变小,所以变频调速运行时必须采取措施,方能正常运转,详细情况下面将要讲述。
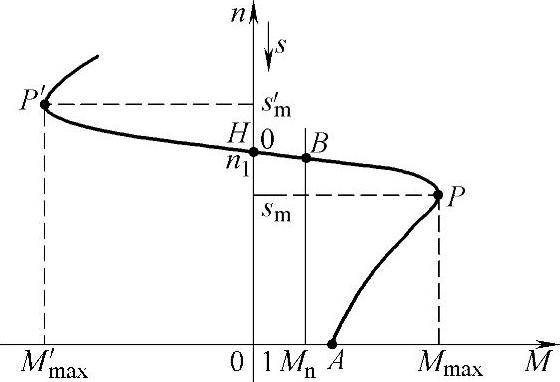
图1-17 固有机械特性

图1-18 变频调速机械特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。