



交-直-交变频器工作时会产生严重谐波:
1.谐波分类
(1)输入侧谐波
由于变频器采用大电容滤波和输入侧采用二极管或晶闸管整流,因此输入电压、电流会发生畸变而产生谐波,称之为输入侧谐波。输入侧谐波对电网造成污染,会使其他电气设备不能正常工作。
(2)输出侧谐波
由于输出侧逆变器开关器件离散动作的特性,其输出电压、电流并非正弦波,除了基波之外,还含有丰富的谐波,称为输出侧谐波。按傅里叶级数分析,电压型变频器输出电压为

电流型输出电流也有类似的谐波分析。基波是产生转矩工作的,而谐波给驱动的电动机产生噪声、振动和发热,往往使电动机不能正常工作。
此外,开关器件频繁动作,产生高频电磁波,会影响周围电子设备正常工作。
消除谐波影响的方法有使用电抗器、滤波器,多脉波整流、PWM逆变器等措施,最有效的措施是采用逆变器脉宽调制(PWM)技术。目前采用行之有效的PWM技术有两种,SPWM技术和SVPWM技术。电抗器、滤波器作为辅助工具,也常采用。
2.SPWM技术
所谓脉宽调制(PWM)就是通过开关器件的快速通断作用,将输出交流半周的直流电压调制为一系列幅值相等而宽度不等的脉冲的一种方法,若脉宽是按正弦规律变化,就是正弦波脉宽调制(SPWM,电流型也可采用)。
SPWM波形的形成是由图1-8a等腰三角波uc和正弦波ur相作用形成的。三角波称为载波,正弦波称为调制波,它们的交点就是产生触发脉冲的时刻,一次通断就形成一个脉冲,一周内连续通断就形成脉冲列。可以看出,脉冲宽度按正弦波瞬时值变化,就可使输出电压接近正弦波。改变调制波的频率就可改变变频器的输出频率,载波频率和调制波频率之比叫做载波比,以K表示;调制波幅值和载波幅值之比叫做调制度,以M表示(一般在0~1之间)。可以看出,K越大,脉冲越多,M越大,脉冲度越宽,输出电压越高,所以采用SPWM可以实现变压变频(VVVF)。
图1-8a为逆变器形成SPWM波形的原理,b为电路结构。
SPWM可分为单极型和双极型两种:
(1)单极型SPWM
单极型逆变器运行时,共阳极组和共阴极组晶闸管轮流工作。
(2)双极型SPWM
其特点是半周内脉冲极性正负交变,称为对称调制,载波比必须为奇数,共阳极组和共阴极组开关器件同时工作。单极型半周内只有一组开关器件工作,对直流电压利用率不高,双极型无此缺点,且谐波抑制效果较好,但有出现桥臂短路的风险。
SPWM的优点是:
1)变频器直流环节可以采用不可控整流器,功率因数达0.96,同时一套整流器可供几台逆变器使用,提高了效率,减小投资。
2)电压调节是在逆变器内进行,调压过程不经过滤波环节,提高了系统响应的快速性,适合于急剧加减速的传动装置。
3)正弦波调制(SPWM)逆变器输出电压接近正弦波,大大减小谐波影响,降低了电动机损耗和脉动转矩,调速比可达几百以上,而静差率不大于3%~8%。由于有上述优点,此种变频器引起人们的重视,得到市场商品广泛的采用,其性能还在不断完善中。
SPWM也有一些缺点:
1)SPWM直流利用率不高,直流利用率等于逆变器输出交流基波线电压幅值与直流电压之比,只有87%。
2)SPWM输出电压仍有一定的谐波分量,使电动机产生一定数量的谐波损耗和一定程度的脉动,低频时尤为显著。
3)谐波分量与载波频率成反比,载波频率越高,谐波分量越小,但是开关损耗却急剧增加。此外,还存在死区问题。
为克服SPWM存在的缺点,专家们开发了一些优化和改造的方案:
(1)特定谐波消除法
以清除幅值最大的5、7、9次等谐波为目标,寻求优化开关角即开关器件通断时刻。
(2)注入3次谐波法
将3次谐波与载波叠加,形成马鞍形,提高直流利用率。
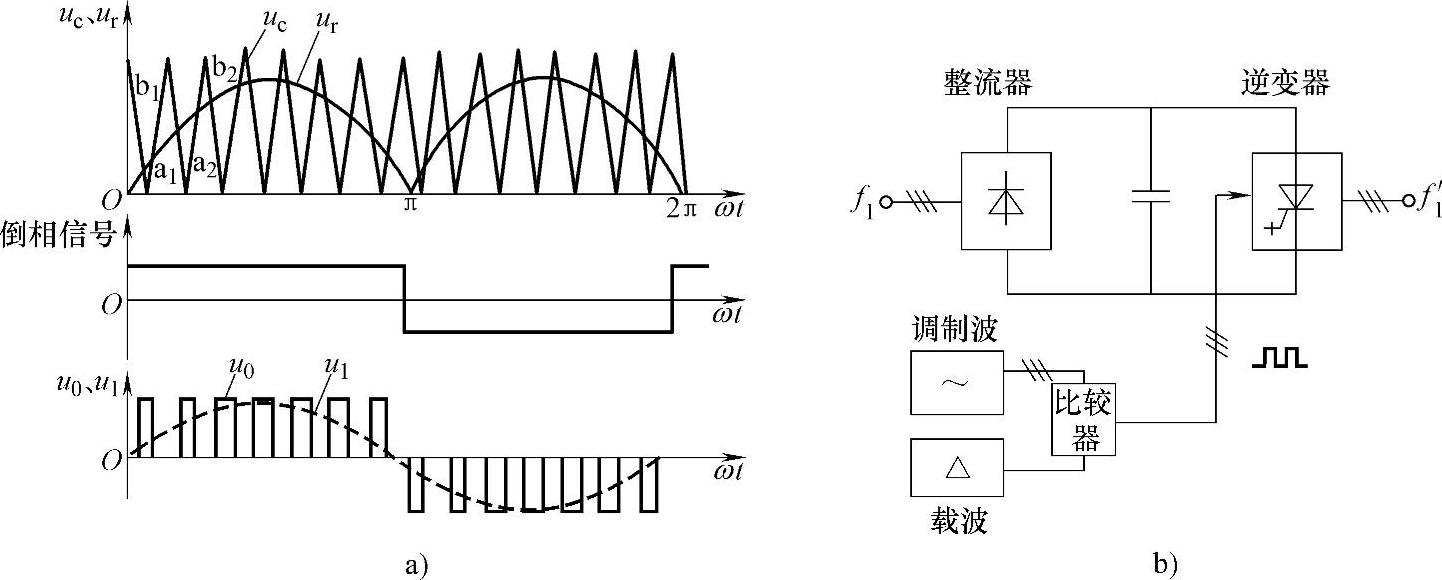
图1-8 波形的形成和电路结构
a)波形形成 b)变频器结构
3.SVPWM技术
(1)SVPWM技术的调制原理与分类
从电机学得知,用电网电源三相正弦波电压加于异步电动机时,三相电压的合成电压产生磁链矢量Ψ,并以同步角速度ω旋转,其轨迹是一个圆形,即产生圆形旋转磁场,并产生恒定的转矩。因此对于逆变器而言,要求其输出合成电压矢量符合电动机磁通轨迹为圆形。SVPWM技术是空间矢量脉宽调制技术,以控制电压空间矢量,使磁链轨迹逼近圆形为目标,所以谐波分量小,转矩十分平稳,还有直流利用率高、三相同时控制等优点。
由于SVPWM技术是逆变器运行采用的调制技术,而逆变器因结构不同,分为两电平、三电平和多电平三类,故SVPWM技术可分为两电平、三电平和多电平三类,
(2)SVPWM技术的优点与应用
SVPWM技术的优点可概括如下几点:
1)逆变器输出电压矢量使电动机磁链轨迹逼近圆形,转矩平稳,逆变器输出谐波小,谐波损耗小。
2)直流利用率高,比SPWM高出15%,充分利用输入电能,并使逆变器输出交流电压符合电动机的额定电压值。
3)SVPWM技术控制算法极便于计算机实现,简单快捷。
4)将变频器的整流器PWM化,可以改善功率因数,可以进行四象限运行,结构与操作比SPWM简单。
由于SVPWM技术有上述优点,故此广泛地用于变频传统系统,此外,直流电源、不间断电源(UPS)、加热炉等也普遍采用SVPWM技术,还用于电力系统,以改善供电质量,如有源滤波、电压稳定装置等。加上它的技术比较成熟,市场上通用变频器不少是SVPWM电压型逆变器。
(3)两电平SVPWM技术
如图1-3所示,逆变器输出的电压只有两个电平,即Ud和0,称为两电平逆变器。当两电平逆变器的调制策略为SVPWM技术时,则此技术就是两电平SVP-WM技术。
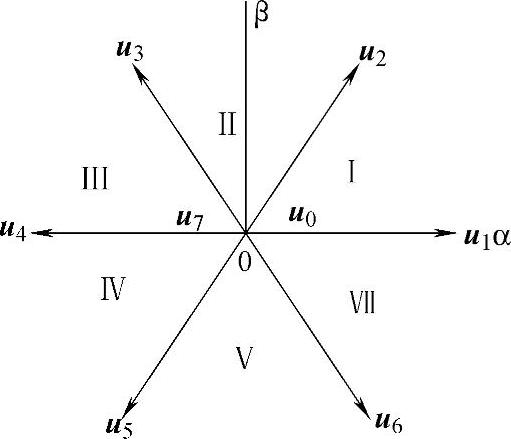
图1-9 电压空间矢量的分布
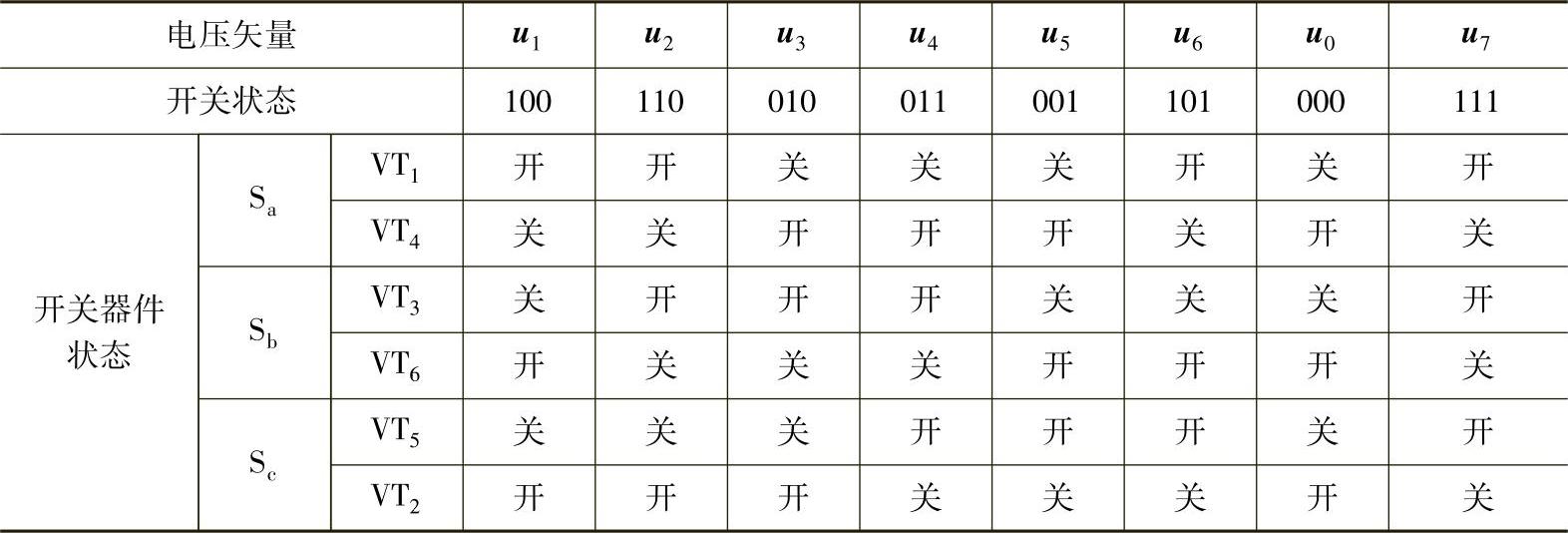
1)逆变器输出电压空间矢量的空间分布。图1-3所示为两电平逆变器六拍运行时,每隔60°切换一次,若以1表示共阳极组IGBT导通,共阴极组IGBT关断,0表示共阴极组IGBT导通,共阳极组IGBT关断;运行一个周期(2π),可构成一组三位二进制编码,按a、b、c相序可表示为100、110、010、011、001、101、000、111共计8种开关状态。每一种开关状态输出合成电压空间矢量(也简称电压矢量或空间矢量)Up,分别记为u1、u2、u3、u4、u5、u6、u0、u7,统称为基本矢量。它们与相应的各开关器件状态见表1-2。其中,u1~u6为有输出电压的矢量,称为非零矢量,u0、u7无电压输出,称为零矢量。8个电压矢量在空间分布如图1-9所示,常用为辐射形式。各矢量互差60°,各个矢量之间可分为6个扇区I~Ⅵ。因磁链和电压矢量为同一方向,若按图中电压矢量切换方向(逆时针),使电动机正转,而按反方向切换(顺时针),使电动机变为反转。
表1-2 电压矢量开关状态对照表
逆变器输出电压合成空间矢量按下式计算:
UP=uA+ρuB+ρ2uC (1-3)
式中 ρ——相量算子;
可以证明,电动机定子电压空间矢量Us与逆变器输出电压空间矢量Up相等,矢量幅值 (https://www.xing528.com)
(https://www.xing528.com)
式中 Ud——直流输入电压。
2)电压矢量与磁链矢量轨迹。根据电机学,合成电压矢量Up与磁场磁链矢量ψ的关系为
当略去电阻时

ψ0为t=0时的磁链,若ψ0=0,则
ψ=UptUp=ψ/t (1-4)
式(1-4)说明,Up与ψ成正比,方向为磁链圆的切线方向。当ψ在旋转一周时,Up连续按磁链圆的切线方向运动2πrad,其轨迹与磁链圆重合,如图1-10所示。
当逆变器按六拍方式运行时,形成逆时针旋转的磁链轨迹为正六边形,故要用一定的调制模式才能逼近圆形。
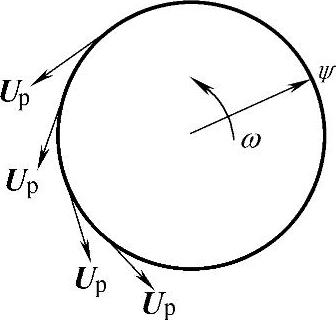
图1-10 磁链轨迹
3)SVPWM对称调制模式和算法。磁链轨迹逼近圆形是由合成电压矢量按一定的调制模式旋转形成的,该矢量称为目标参考矢量,简称参考矢量Uref。在图1-9中,Uref不一定和6个基本矢量重合,但可用所在扇区的两个相邻矢量来合成,因此要得出在任一位置的计算公式。设参考电压矢量处于扇区I,可用相邻两个基本电压矢量u1和u2的线性时间组合来合成,如图1-11所示。
Uref=(t1/T0)u1+(t2/T0)u2式中t1、t2——u1和u2的作用时间;
T0——扇区所经历的时间,T0=2π/(6ω),ω为给定的角速度。由图可得计算公式
t1=MT0 sin(π/3-θ) (1-5)
t2=MT0 sinθ(1-6)
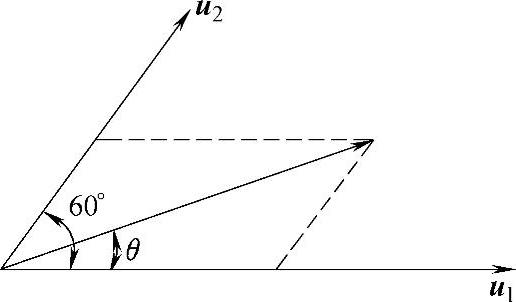
图1-11 电压空间矢量的线性组合
由于t1+t2不一定等于ω计算的时间,因此要用零矢量来调节,使T0=t1+t2+t0。t0=T0-(t1+t2)(1-7)
插入零矢量不是集中的加入,而是将零矢量平均分成几份,多点地插入到磁链轨迹中,这不但可使磁链的运动速度平滑,而且还可减少电动机的转矩脉动。
在实际应用SVPWM时,常采用正六角形(n=6)模式,取其控制较简单,但每一个边仍由矢量合成,对电压波形进行特殊调制,以减小谐波分量,磁链轨迹逼近圆形。每一个扇区参与调制的电压矢量为相邻两个非零矢量和零矢量,各扇区电压矢量及排列的顺序使开关状态对称分布,故称为对称调制模式。6个扇区调制波形如图1-12a,以扇区I为例,基本电压排列顺序及作用时间如图1-12b所示。
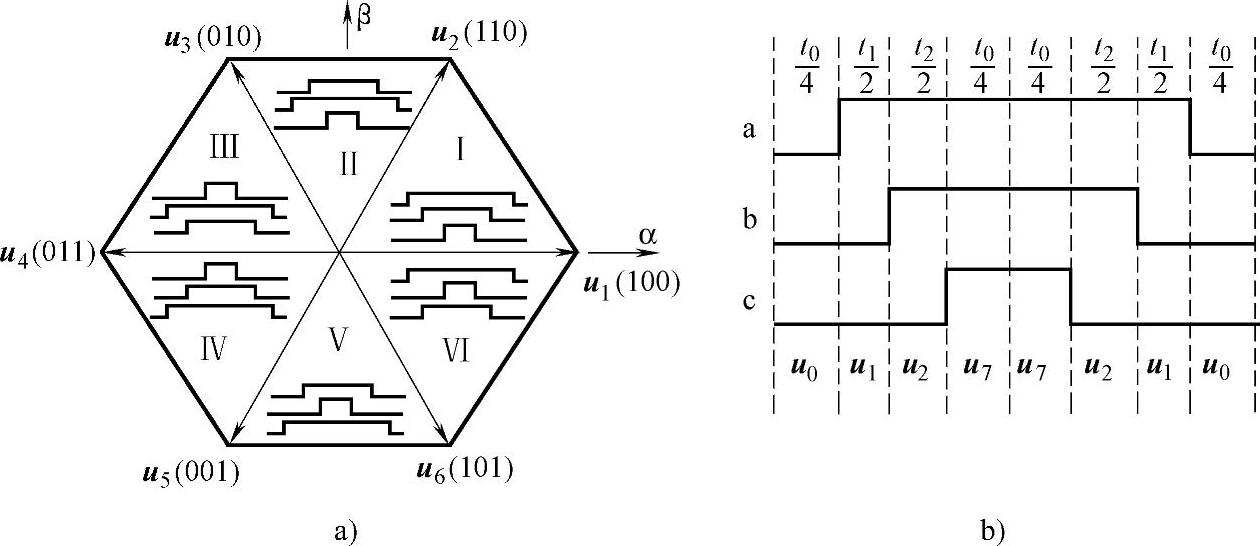
图1-12 调制波形
a)扇区调制波形 b)基本电压排列顺序及作用时间
对称调制模式效果良好,图1-13为逆变器输出电流、电压波形,电流波形很近似正弦波形,因此磁链轨迹也接近为圆形。
对称调制模式的特点和优点:
1)每个扇区虽有多次开关状态切换,但每次切换只有一个开关动作,开关损耗较小。
2)利用电压空间矢量直接生成波形,适于计算机介入,非常适合数字信号处理器(DSP)等高性能单片机,计算简便。
3)逆变器输出电流平衡,磁链轨迹逼近圆形,谐波分量小,转矩较平稳,噪声小。
4)三相同时控制,简单方便。
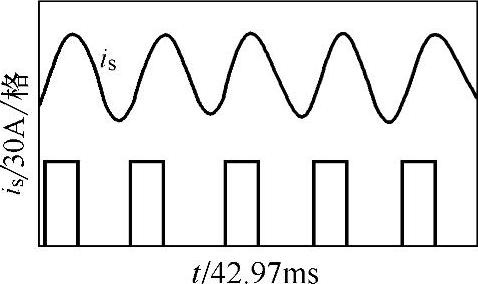
图1-13 逆变器输出电流、电压波形
5)线电压基波最大值等于直流电压,直流利用率高,比一般SPWM高出15%。
(4)三电平SVPWM技术
1)三电平逆变器。逆变器能输出三电平的称为三电平逆变器,属于高压变频器,用于3kV、6kV、10kV高压电动机传动。三电平逆变器的拓扑结构很多,常用的为二极管钳位式三电平逆变器,其电路拓扑如图1-14所示。逆变器采用多个二极管对相应开关器件进行钳位,以保证每次一个桥臂只有一个开关动作,并实现多电平输出,而每一个开关器件只承受1/2的直流母线电压。这种变频器性能很好,得到广泛的应用。
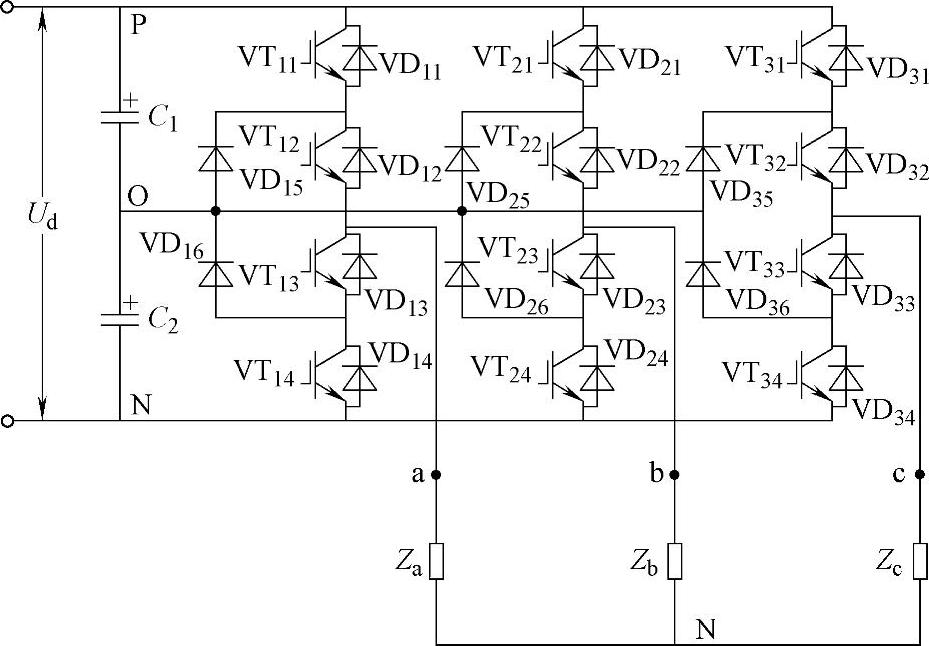
图1-14 二极管钳位式逆变器
2)三电平电压空间矢量的分布。
① 三电平的形成:在图1-14所示的IGBT三电平逆变器中,设VI11~VI14为某相中的4个IGBT,只要改变4个器件的不同开关状态,在输出端即可以获得3种不同的输出电压(Ud,O,-Ud),参见表1-3,逆变器输出有三个电平,用+、0、-或p、o、n表示开关状态,Ud为直流电压,这便是所谓三电平。
表1-3 三电平变频器输出电压组合

② 三电平空间电压矢量与分析:三电平空间电压矢量由三相输出状态合成,在数值上和两电平逆变器一样,经Park变换后,三电平逆变器三相电压合成的空间电压矢量为
Us=ua+ρub+ρ2uc (1-8)
式中 ρ——相量算子,
Us——定子瞬时空间电压矢量;
ua、ub、uc——三相输出电压矢量,幅值|Us|=2Ud/3。
三相电压合成后,由于逆变器有3个桥臂,所以共有33=27种基本电压矢量,除掉重复冗余的,还有19个。与两电平相比,基本矢量大为增加,故对控制算法优化极为有利。
这19个电压矢量幅值各不相同,可分为3类:2Ud/3、 、Ud/3。这些矢量如图1-15a所示,一般将幅值为2Ud/3的矢量称为大或长矢量,如PNN、PPN;幅值为
、Ud/3。这些矢量如图1-15a所示,一般将幅值为2Ud/3的矢量称为大或长矢量,如PNN、PPN;幅值为 的矢量称为中矢量,如PON;幅值为Ud/3的矢量为小或短矢量,如POO、ONN。小矢量总是成对出现的,如PPO与OON,一般称之为冗余小矢量。还有OPO和NON、OPP和NOO、OOP和NNO、POP和ONO。此外,图中原点为零电压矢量,也是一种冗余电压矢量,包括有PPP、OOO和NNN三种开关状态。三电平空间矢量分布也划分为6个扇区,每个扇区又划分为4个小区,如图1-15b所示。
的矢量称为中矢量,如PON;幅值为Ud/3的矢量为小或短矢量,如POO、ONN。小矢量总是成对出现的,如PPO与OON,一般称之为冗余小矢量。还有OPO和NON、OPP和NOO、OOP和NNO、POP和ONO。此外,图中原点为零电压矢量,也是一种冗余电压矢量,包括有PPP、OOO和NNN三种开关状态。三电平空间矢量分布也划分为6个扇区,每个扇区又划分为4个小区,如图1-15b所示。
③ 三电平SVPWM控制算法:三电平SVPWM的参考矢量由三个基本矢量合成,三电平控制算法(简称算法)总的要求是使三电平三相逆变器输出的电压空间矢量满足磁链轨迹为圆形或逼近圆形,三电平控制算法是在一个控制周期或采样周期内分成四步完成的:
• 确定合成参考电压矢量的三个基本矢量;
• 确定三个矢量的作用时间,即每个矢量对应的占空比;
• 确定三个矢量对应的开关状态;
• 确定状态的输出次序以及各相输出电平的作用时间,即确定输出的开关状态序列和对应三相的占空比。
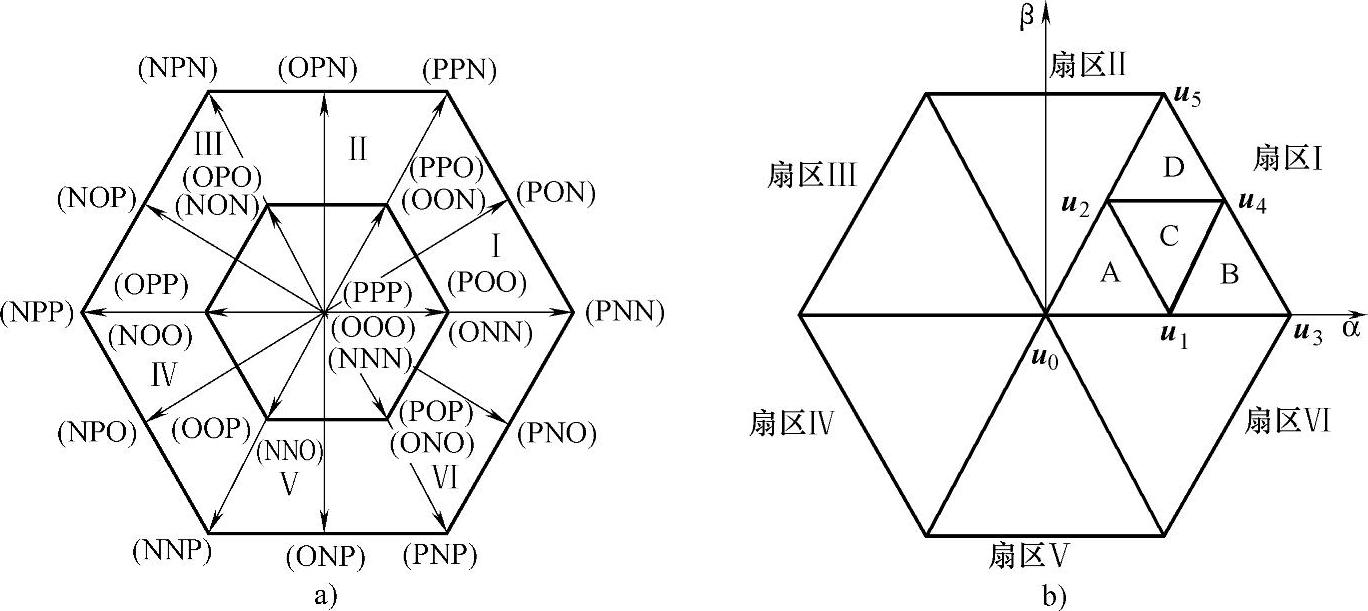
图1-15 三电平SVPWM电压空间矢量分布图
三电平逆变器运行时,会出现中点电压不平衡问题,影响运行不正常和引起滤波电容被击穿,目前已有许多措施加以改进,可以克服这个缺点。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。