



鱼类经过亿万年的自然选择与进化,形成了非凡的水中运动能力,既可以在持久游速下保持低能耗、高效率,也可以在拉力游速或爆发游速下实现高机动性。正是这种在水中运动的完美性,吸引了世界各国科研工作者对模仿鱼类游动方式的游动仿生机器人技术进行研究与开发。目前已研制出的水下仿生机器人中,根据其所模仿水下生物的运动方式,可分为仿鱼类的游动仿生机器人、仿多足爬行动物水下机器人和仿蠕虫水下机器人。这里主要对游动仿生机器人(机器鱼)进行介绍。
机器鱼,顾名思义,用材料制作的外形像鱼的机器,配备有化学传感器的自主机器鱼能够在水中游数小时,机器鱼用于发现污染物质,并绘制港口的实时三维图,从而表明当前海水中存在什么化学物质以及位于什么地方。这项技术的开发将增加港口管理部门监视船舶污染、其他类型有害污染物和来自水下管道排放污染物质的灵活性和适应性。除了有益于港口的监视操作外,这个项目还能带来机器人技术、生化分析、水下通信和机器人智能的重要进步。
1.游动仿生机器人机构原理
在对鱼类推进机理的研究中发现,鱼类在其自身的神经信号控制下,可以指挥其体内的推进肌产生收缩动作,导致身体的波状摆动,从而实现其在水中的自由游动。
根据鱼类推进运动的特征,可以划分为两种基本推进模式:身体波动式(见图8-35)和尾鳍摆动式(见图8-36)。在波动式推进中,鱼类游动时整个身体(或几乎整个身体)都参与了大振幅的波动。由于在整个身体长度上至少提供了一个完整的波长,所以使横向力相抵消,使横向的运动趋势降低到最小。波动式推进的推进效率主要与波的传播速度有关,波的传播速度越大,推进效率就越高。与尾鳍摆动式推进方式比较而言,身体波动式推进效率较低,主要适用于狭缝中的穿行。尾鳍摆动式推进方式是效率最高的推进模式,海洋中游动速度最快的鱼类都采用尾鳍摆动式推进模式。在运动过程中尾鳍摆动,而身体仅有小的摆动或波动,甚至保持很大的刚性。
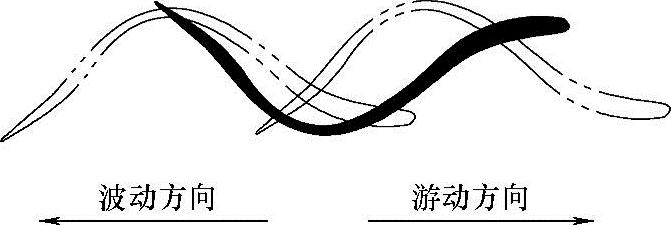
图8-35 身体波动式推进模式
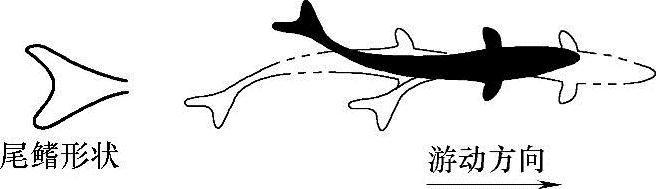
图8-36 尾鳍摆动式推进模式
仿生机器鱼就是参照鱼类游动的推进机理,利用机械、电子元器件或智能材料来实现水下推进功能的运动装置。
2.游动仿生机器人实例
应用仿生学原理,模拟鱼类的身体结构和运动形式来设计游动仿生机器人,已成为水下机器人研究领域新的发展方向。
(1)仿生金枪鱼(RoboTuna)和仿生梭鱼(RoboPike) 美国麻省理工学院的Tri-anffyllou等人通过长时间观察鱼类的游动研究发现,在自行驱动的鱼类体后部有射流形成,这些喷射的涡流产生推力从而使得鱼儿游动。根据“射流推进理论”,1994年成功研制了世界上真正意义上的游动仿生机器人——仿生金枪鱼和仿生梭鱼。
仿生金枪鱼是一条长约4ft(1ft=0.3048m),由2843个零件组成的、具有高级推进系统的金枪鱼。它模仿蓝鳍金枪鱼而制造,如图8-37所示。仿生金枪鱼具有关节式铝合金脊柱、真空聚苯乙烯肋骨、网状泡沫组织,并用聚氨基甲酸酯弹性纤维纱表皮包裹,它装有多台2马力(1马力=735.499W)的无刷直流伺服电动机、轴承及电路等。仿生金枪鱼在多处理器控制下,通过摆动躯体和尾巴,能像真鱼一样游动,速度可达7.2km/h(4节),仿生金枪鱼的摆动式尾巴有助于机器鱼的驱动,推进效率达91%。
麻省理工学院的仿生梭鱼如图8-38所示,由玻璃纤维制成,上面覆一层钢丝网,最外面是一层合成弹力纤维,尾部由弹簧状的锥形玻璃纤维线圈制成,使机器梭鱼既坚固又灵活。它的硬件系统主要包括头部、胸鳍、尾鳍、背鳍、主体伺服系统、胸鳍伺服系统、尾部和尾鳍伺服系统以及电池等。采用一台伺服电动机为其提供动力,来驱动各关节以实现躯体摆动。仿生梭鱼的研制成功,揭示鱼类为什么比我们想象的游得要快的原因,因为鱼类看上去不具备使其游的那样快的肌肉力量,同时证明其具有良好的在静止状态下的转向和加速能力。
(2)仿生黑色鲈鱼机器鱼 日本N.Kato等人根据黑色鲈鱼的胸鳍动作原理,从水下运动装置的机动性能出发,分析了胸鳍动作状态与游动姿态的关系。发现了鱼在水平面以及垂直平面上的盘旋及转向运动与鱼的胸鳍动作之间的关系,于1996年研制了实验样机(见图8-39),该样机用PC机来控制以实现类似于鱼类的运动。(https://www.xing528.com)
(3)仿生水下机器人“仿生一Ⅰ”号 在国内,哈尔滨工程大学于2003年设计了仿生水下机器人“仿生一I”号,如图8-40所示,其外形和游动方式仿制蓝鳍金枪鱼。“仿生一I”号在水池试验中的最大摆动频率为13Hz,通过调整尾鳍的摆动,“仿生一I”号具有纵向速度和转向控制能力。

图8-37 仿生金枪鱼结构

图8-38 仿生梭鱼组装图
图8-39 仿黑色鲈鱼机器鱼
图8-40 仿生水下机器人原理样机“仿生一Ⅰ”号
仿生水下机器人“仿生一I”号长2.4m,最大直径0.62m,负载能力70kg,潜深10m,配有月牙形尾鳍和一对联动胸鳍。尾部为具有3个节点的摆动机构,约占总长的1/3,采用蜗轮蜗杆传动,其中前两个节点通过齿轮联动,控制尾柄的摆动,并通过包裹在外面的蒙皮形成整个鱼体的流线型,最后一个结点则用来控制尾鳍的运动。该结构所产生的运动与金枪鱼的游动方式相适应。机器人采用大展弦比的月牙形尾鳍,通过尾鳍的摆动提供前进的动力和转向的力矩;胸鳍则可以控制机器人的深度,尾鳍和胸鳍均采用NACA0018翼型。躯体中部的背鳍和胸鳍可起到减摇作用。该机器人在加装光纤陀螺、深度计和定位系统后,可实现转向、深度和速度的闭环控制。为防止电动机反向对尾部传动机构冲击过大,设定电动机不能反向,因此尾鳍在一个摆动周期内一定会摆动到两个极限位置。
(4)“SPCU”型仿生机器鱼 2004年12月,北京航空航天大学机器人研究所和中国科学院自动化研究所成功地研制出了“SPCII”型仿生机器鱼,如图8-41所示。这条机器鱼主要由动力推进系统、图像采集和图像信号无线传输系统、计算机指挥控制平台3部分组成,计算机编制的程序经过信号放大器来控制6个步进电动机,6个步进电动机又分别与遥控器发射机的6个控制电位器相连,来控制发射机的信号发射,两个接收机则安置在鱼的头部。机器鱼同时装有卫星定位系统,如果启动该系统,机器鱼还可以自行按设定航线行进。机器鱼的壳体仿照鲨鱼的外形,主要制造材料为玻璃钢和纤维板。这条鱼体长1.23m,总质量40kg,最大下潜深度为5m,体表是复合材料,它的最高速度可达1.5m/s,能够在水下连续工作2~3小时。
这种具有我国自主知识产权的仿生水下机器鱼,稳定性强,行动灵活,自动导航控制,在水下考古、摄影、测绘、养殖、捕捞以及水下小型运载等方面,具有广泛的应用前景。
图8-41 “SPCⅡ”型仿生机器鱼
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。