



自古以来人们就梦想着在天空自由翱翔。对鸟的生理结构和飞行原理等方面所做的研究和获得的灵感,使人类乘着飞机上了天。昆虫与鸟相比,具有更大的机动灵活性。对昆虫生理结构和飞行机理的研究,将仿制出具有更大飞行灵活性和自由度的新型飞行器——仿生飞行机器人。仿生飞行机器人通常具有尺寸小、便于携带、行动灵活和隐蔽性好等特点。最近几年,在昆虫空气动力学和电子机械技术快速发展的基础上,各国纷纷开始研究拍翅飞行的仿生飞行机器人,仿苍蝇和蚊子的微型机器人已经问世,使得仿生飞行机器人成为机器人研究活跃的前沿领域。
1.飞行仿生机器人的翅膀
昆虫是整个动物界最早获得飞行能力的动物。昆虫飞行的能力和飞行技巧的多样性,主要来源于它们翅膀的多样性和微妙复杂的翅膀运动模式。昆虫可以快速改变运动方向,保持完美的高度控制。它们能够垂直起飞或着陆,盘旋几秒钟,向后运动,甚至可以上下翻滚飞行,同时消耗很少的能量。
(1)以静电致动方式的仿生扑翼
1)扑翼结构。飞行昆虫的特征如外部骨骼、弹性关节、变形胸腔以及伸缩肌肉等为我们设计微型飞行器提供了借鉴思路。
图8-29所示为昆虫胸腔的横截面。从图中可看出,通过肌肉的收缩与伸长使得胸腔发生变形,从而带动两侧的翅膀上下扑动,其中弹性胸腔机构的变形对产生无摩擦的高速扑翼运动起着重要的作用。大多数昆虫的扑翼运动由神经所产生的脉冲信号来控制,而一些小型昆虫(如苍蝇、蜜蜂等),扑翼频率要远高于神经的脉冲频率,这时候扑翼频率主要是由肌肉、弹性关节以及胸腔所组成的运动机构的自然频率决定。
对于尺寸在毫米级的微扑翼飞行器,其扑翼机构可以采用静电驱动、压电驱动以及电磁驱动等方式。在常规的宏观机电系统中,电磁能量向机械能量转换的致动器——电磁马达的应用最为普遍。与电磁能量转换相比,静电型换能机构由于能量密度低而很少实际应用。但是,随着尺寸的微小化,静电换能显示出其优越性。静电驱动工作原理简单、易实现、功耗小、易集成化,随着半导体微细加工技术的发展,特别是牺牲层刻蚀技术的开发,为静电致动器的研究提供了可能的技术背景,使静电致动在微型致动器的研究开发中占据了突出的位置。
2)结构设计。基于以上原因,所设计的微扑翼驱动机构采用静电致动方式。整个驱动机构的形式仿照昆虫的胸腔式结构,其结构如图8-30所示。系统的主体由上下平行的两块极板组成,其中一块固定在基体上,另一块可移动板与两边的连杆相连接,并通过连杆带动两边的翅膀上下扑动。整个机构没有轴承和转轴之类的运动部件,各支点和连接处(A、B、C等处)均采用柔性铰链连接,柔性铰链可采用聚酰亚胺(polyimide)树脂,用沉积、涂布等微加工方法实现,因为柔性铰链的弹性模量很小,加上适当的结构设计,可以保证它只具有很小的运动阻力。当在上下极板间加上交变电压时,机翼就会在交变电场的作用下上下扑动。令激励电压的频率等于驱动机构的自然频率,此时驱动机构会有更大的扑翼幅值。当给极板两边加以不同的电压时,两边的机翼就会产生不同的扑翼幅值,因而引起两边的升力及推力大小不同,使得整个飞行器转向。
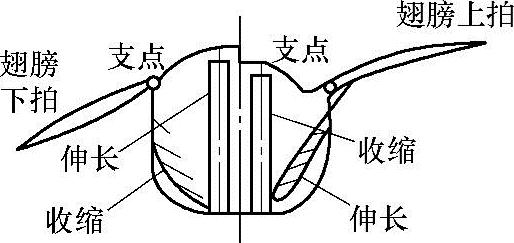
图8-29 昆虫胸腔的横截面
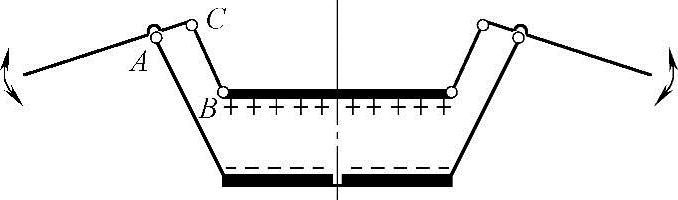
图8-30 两自由度胸腔式扑翼驱动机构
(2)以分解简化扑翼复杂运动方式的仿生扑翼
1)仿生扑翼机构。仿生飞行机器人以模仿昆虫拍翅运动为主,因此研究和理解昆虫飞行的运动机理和空气动力学特性,是进行仿生飞行机器人研究的重要基础。昆虫的种类根多,扑翼形式复杂多样。在研究中,将昆虫复杂的扑翼运动分解为平扇与翻转两个基本动作,如图8-31所示,平扇运动改变翅膀的扇翅角φ,翻转运动改变翅膀的翅攻角α,这两个动作的协调运动可以实现昆虫的自由飞行。以果蝇为例,它在悬停飞行时φ可达到180°,在平扇过程中翅保持匀速,并使α为450°~500°,可以获得较大升力。
由于翅膀处于高频振动状态,为了减小惯性力影响,同时为了最终应用于扑翼式微型飞行器,运动件的重量应尽可能小,两个转动之间应存在尽量小的质量耦合,而且机构的复杂程度也受到限制。
2)仿生扑翼机构设计。仿生扑翼机构的设计主要分为两部分,首先是两组曲柄摇杆机构将曲柄输入的旋转运动转换为两个摇杆的摆动运动输出,如图8-32所示。
这两组曲柄摇杆机构的尺寸参数均相同,只是曲柄O1A与曲柄O2A′存在一固定的相位差θ,所以两个摇杆的摆动输出并不同步,角度ψ在不同转角位置时会有不同的取值。电动机旋转时,摇杆O2B′会先到达摇杆运动空间的极限位置,随后摇杆O2B才到达与其相对应的极限位置,在这一过程中,ψ会逐渐减小到零,然后又会反方向逐渐增大,利用这一特性将两个摆动输出再传递到下面的差动轮系。(https://www.xing528.com)
差动轮系原理如图8-33所示,当两个摆动输入角ψ不变时,行星轮随着行星轮支架绕轴O3转动,自身不转动;当两个摆动输入的ψ变化或者反向运动时,行星轮会绕自身轴线O4转动。
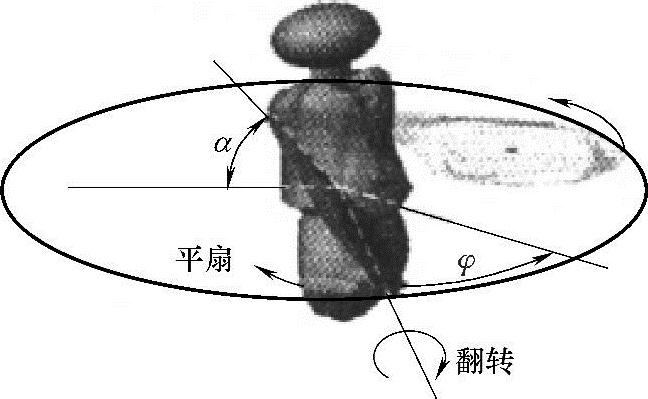
图8-31 扑翼机构分析
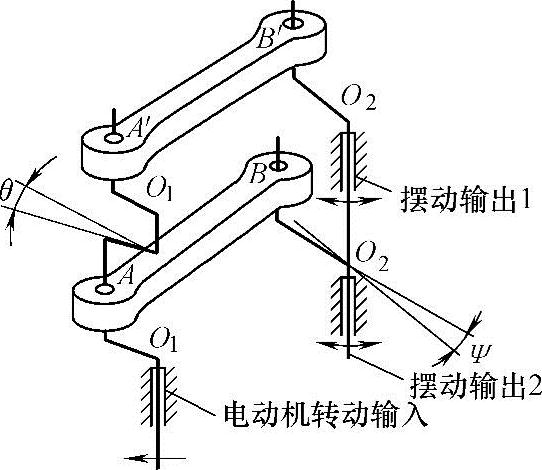
图8-32 并联曲柄摇杆机构
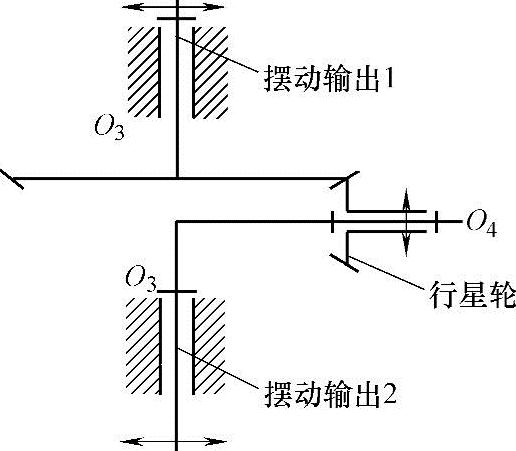
图8-33 差动轮系原理
因此,将翅膀固定在行星轮上,当曲柄连续转动,两个摇杆摆动输出的ψ近似不变时,翅膀保持α不变而做平扇运动;当两个摇杆在极限位置处反向运动时,翅膀则完成反扇转换过程中的翻转运动。于是,通过设计不同的扑翼机构参数就可以实现不同ψ及α的扑翼形式。
2.飞行仿生机器人实例(拍翅微飞行器)
飞行仿生机器人的飞行性能和物理特性是:雷诺数极小,表面积与体积之比很大,总质量严格受限。从结构特点、飞行力学、负载特性、能量供给和敏捷性等方面,飞行仿生机器人与蜻蜓、蜜蜂或蜂鸟有些相似,与传统的飞机有本质区别。
加利福尼亚技术研究所与美国加州大学洛杉矶分校等共同进行了拍翅微飞行器(MAV)的研究。该系统总重6.5g,由电动机、传动系统、动力源、MEMS翅膀、碳纤维机身和尾部稳定器等组成,头部装有可视成像仪,采用微麦克风阵列识别声音方向,该系统不包含通信系统。在高质量的、体积为30cm×30cm×60cm和风速为1~10m/s的风洞中进行飞行实验时,以电容为动力源的拍翅微飞行器,拍打频率为32Hz,飞行速度可达250m/min,最长自由飞行时间可达9s,但拍打时间不到1min,就需给电容充电。而以NicdN-50电池作为动力源,并增加了DC—DC转换器的拍翅微飞行器,在自由飞行实验时,最长自由飞行时间为18s。
日本东京大学很早开始昆虫飞行机理和微飞行机器人的研究。他们以计算流体和实验流体为主,通过理论和实验研究对翅膀的运动机理有了初步认识,并以蚊子为基础,进行不同翅膀结构的微飞行装置研究,研制成了由静电驱动的微拍翅机构,如图8-34所示。在板和基底(硅片)之间加上电压,板向基底运动,这时多晶硅翅膀就产生弯曲。当电压变化的频率与机械振动频率一致时,产生共振,振动幅度加大。
设计和制造具有非定常空气动力学特性的高效仿昆翅,是仿生微飞行机器人研究中最富于挑战性的一个研究难题。翅膀必须轻而坚固,在高频振动下不会断裂,并且能为整个仿生飞行机器人提供足够的升力和推进力。仿昆翅的研究包括翅膀结构和形状设计、翅膀传动机构设计、机构和翅膀材料的选择以及与制造有关的工艺问题。
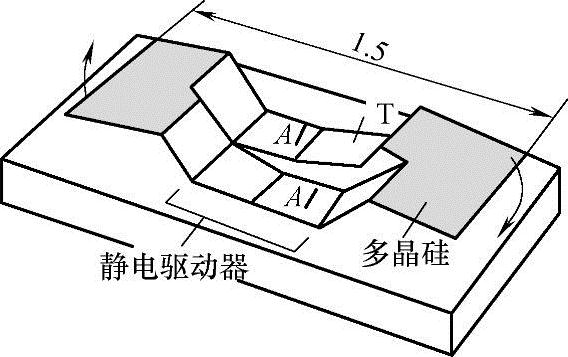
图8-34 拍翅微飞行机构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。