



仿生爬行机器人与传统的轮式驱动的机器人不同,采用类似生物的爬行机构进行运动。这种运动方式使得机器人可以具有更好的与接触面附着能力和越障能力,在军事侦察及民用高层建筑外墙壁清洁等领域都具有非常广泛的应用前景。由于这类爬行机器人在机构、驱动和控制方面的特殊要求,使得实际制作出的仿生爬行机器人很难达到预先的设计效果,目前爬行机器人所具有的一系列潜在优越性能还没有完全得到实际体现。
1.仿生爬行机器人机构
爬行机构的特点是多自由度、多关节的协同动作。由于关节自由度多,动力学模型复杂,实现稳定的爬行运动比较困难,所以爬行仿生机构在工程中的应用很少。在长期的进化和生存竞争中,许多动物,如壁虎、蜘蛛、蛇等,具有了优异的在光滑或粗糙的各种表面上自如运动的能力,仿生爬行机器人的研究有广阔的应用前景。
图8-21 六足仿生步行机器人的装配图
爬行机器人可分为爬壁机器人和蛇形机器人。
(1)爬壁机器人 爬壁机器人必须具有两个基本功能:壁面吸附功能和移动功能。目前,爬壁机器人的吸附方式主要有三种:真空吸附、磁吸附和推力吸附。移动功能则大多以轮式、履带式和足式三种机构来实现。由于每种吸附方式和移动机构都具有各自的优缺点,因此,爬壁机器人的设计要根据具体的作业要求来制定。
1)足-掌机构。为了使仿生爬行机器人具有近似于爬行动物的运动特性,爬壁机器人对足-掌机构都有特殊的要求。
爬壁机器人对腿足机构的要求可归纳为以下主要方面:
①腿机构具有足够的刚性和承载能力。
②腿机构具有足够大的工作空间。
③机构足端的支撑相直线位移便于控制。
在腿足机构的端点连接吸掌以后,对掌机构的要求主要有:
①掌的姿态可以调节控制,以便在地壁过渡行走时适应壁面法线方向。
②调节掌机构的驱动装置尽可能安装到机器人机体上。
③爬壁机器人在壁面上移动时,处于支撑相的掌与足端应没有限制转动的强迫约束。
图8-22所示是复合足-掌机构的结构。缩放式腿机构上的A、B两点的直线移动由两台主电动机(图中未示出)通过齿轮减速、经丝杠10、螺母11转换而成。与螺母11一体的滑块12的导向,由导柱9和直线轴承8完成。掌组件15的姿态调整由A处的另一台电动机(图中未示出)带动带轮14、齿形带7和带轮2,使与带轮2固连的连杆1随之摆动,通过连杆16使掌组件15转动改变姿态。压带轮4和6与张紧轮5起到使齿形带张紧的作用。由于带轮2和14的直径相同,杆3的两端铰链点与齿形带的两个切点构成一平行四边形,它与掌组件上的另一个平行四边形一起,保证机器人在平地(或平壁)上运动时掌姿态的自行保持。
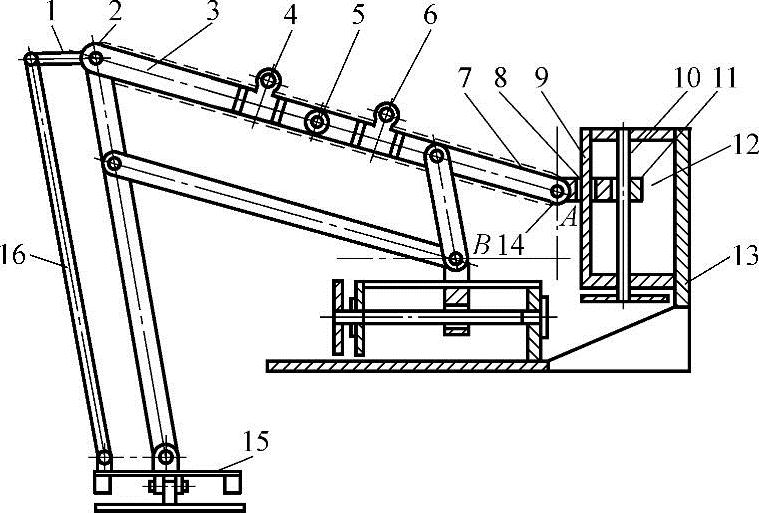
图8-22 复合足-掌机构的结构
1、3、16—连杆 2、14—带轮 4、6—压带轮 5—张紧轮 7—齿形带 8—直线轴承 9—导柱 10—丝杠 11—螺母 12—滑块 13—机架 15—掌组件
2)吸附机构。图8-23所示的吸附机构由5个吸盘及5个真空发生器组成,吸盘安装在吸盘支撑板上(见图8-24),吸盘支撑板和柔性驱动器之间通过连杆和弹簧相连,而真空发生器的出气口连在吸盘上端的进气口。随着机器人的运动,当1组吸盘完全接触工作表面到达吸附状态时,对应的电磁阀打开,与之相连的真空发生器工作产生真空,吸盘吸附在工作表面上。反之,随着机器人前进,当1组吸盘即将要离开平面时,对应的电磁阀关闭,则吸盘的吸附力逐渐降到零,而可以脱离工作表面。在设计中,任何时刻都至少保证有3个吸盘同时吸附在工作表面上,以产生足够的吸附力,防止机器人从墙壁上滑下或倾翻。
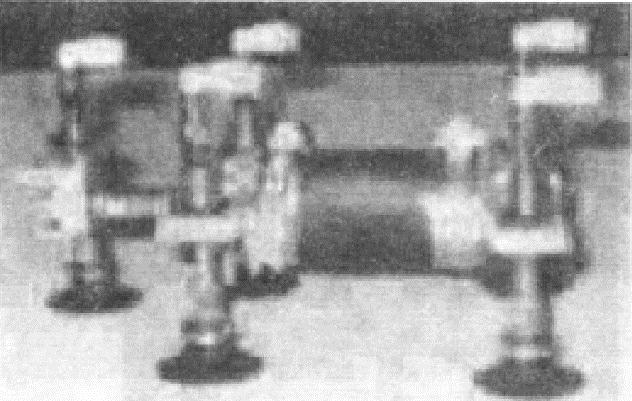
图8-23 爬壁机器人吸附机构
 (https://www.xing528.com)
(https://www.xing528.com)
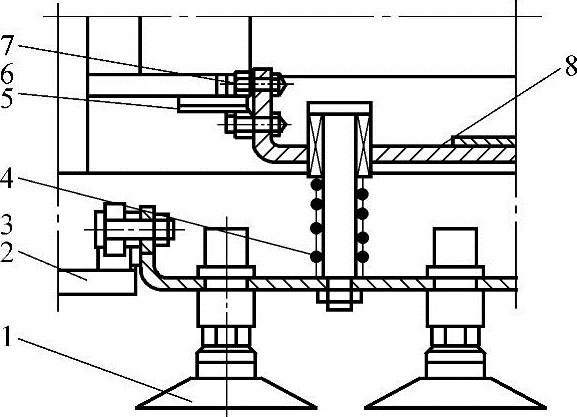
图8-24 吸盘组导向和提升装置
1—吸盘 2—吸盘提升装置 3—撑板弹簧 4—弹簧 5—导轮 6—链条连接板 7—连杆 8—吸盘支撑板
机器人在墙上或一定坡度的坡面上爬行时,吸附在工作平面上的吸盘连杆相当于一柔性悬臂梁,由于受重力作用会向下倾斜,当下一组吸盘组切入吸附状态时,吸盘连杆在工作面法线方向,将不能保证这组吸盘组与已经吸附的吸盘组相互平行的姿态,因此必须保证吸盘组在垂直于工作面进入吸附状态,并能够维持垂直(近似)姿态直到吸盘组脱离,故需要设计吸盘组导向装置,在框架两侧安装纵向的导向支撑板(导轨),链条连接板的两端安装有三导轮,吸盘组的导轮进入导向支撑板后,在导向支撑板、链条及直线轴承的作用下,保证吸附状态的吸盘连杆在机器人爬行时能保持相互姿态。为了避免吸盘在前轮下方切入时卷褶漏气,设计了吸盘提升装置。在一吸盘组进入吸附状态前,吸盘支撑板上的滚轮作用在提升轨道上,提升轨道将吸盘支撑板连同吸盘相对于链条连接板提升一段距离,到达吸附位置时,在弹簧作用下将吸盘弹回,吸盘组进入吸附状态。
(2)蛇形机器人 在绝大多数人眼中,蛇是一种可怕的动物,甚至有很多人不愿意提及或看到这种动物。农夫和蛇等寓言故事,无不反映出蛇阴险和可怕的一面。当然它本身与众不同的移动方式,也使人们产生恐慌和害怕,从而避而远之。其实蛇是非常有益于人类的动物,它可以消灭老鼠等害虫,而且对于整个生态平衡起着至关重要的作用。当然本文并不是研究生物蛇和人类的关系,而是根据蛇的生理结构和运动特点,设计和研究蛇形机器人的结构和运动,是从仿生学的角度出发研制有利于人类社会的机器人。当代机器人的研究领域已经从结构环境下的定点作业向非结构环境下的自主作业发展。机器人被急切需要应用到环境复杂、高度危险和人类无法进入的场合完成作业。除了传统的车型设计方法外,机器人学者把目光转向了生物界,力求从具有各种运动特征的动植物上获得启发,设计新的仿生机器人。蛇形机器人就是在这种条件下孕育而生的。蛇的各种独特的运动特性赋予蛇形机器人以多种功能。蛇形机器人不但能够适应各种复杂地形,能够平均分配自己的体重,还具有自封闭的结构等特点使其吸引了国内外众多机器人学研究人员展开了对蛇形机器人的研究。关于蛇形机器人的研究,美国和日本走在前列,此外加拿大、英国、瑞典、澳大利亚等也都在开展这方面的技术研究。
蛇形机器人是一种新型的仿生机器人,与传统的轮式或两足步行式机器人不同的是,它实现了像蛇一样的“无肢运动”,是机器人运动方式的一个突破,因而被国际机器人业界称为“最富于现实感的机器人”。
机器蛇具有结构合理、控制灵活、性能可靠、可扩展性强等优点,在许多领域有广泛的应用前景,如在有辐射、有粉尘、有毒环境下及战场上执行侦察任务;在地震、塌方及火灾后的废墟中寻找伤员;在狭小和危险环境中探测和疏通管道。
伦敦大学科学家为军方研制出一种蛇形机器人,如图8-25所示。传统机器人的运动方式无外乎轮式、履带式或足式三种,而“机器蛇”堪称是世界上第一种靠自己“肌肉”前进的蛇形机器人。它像真蛇一样有一条“脊椎骨”,其实这是一串模块化的“脊椎单元”,它们像拼插玩具一样紧紧地咬合在一起。每个“脊椎单元”上有5条独立的“肌肉”。这些“肌肉”由镍钛合金金属丝制成。镍钛合金具有“形状记忆”的特殊本领:当有电流通过时,它的晶体结构会收缩,断电后又能恢复到以前的形状。“机器蛇”通过内置的程序控制通过不同金属丝电流的开关和强弱,从而操纵每条“肌肉”活动的方向与力量,指挥“机器蛇”向预定目标前进。
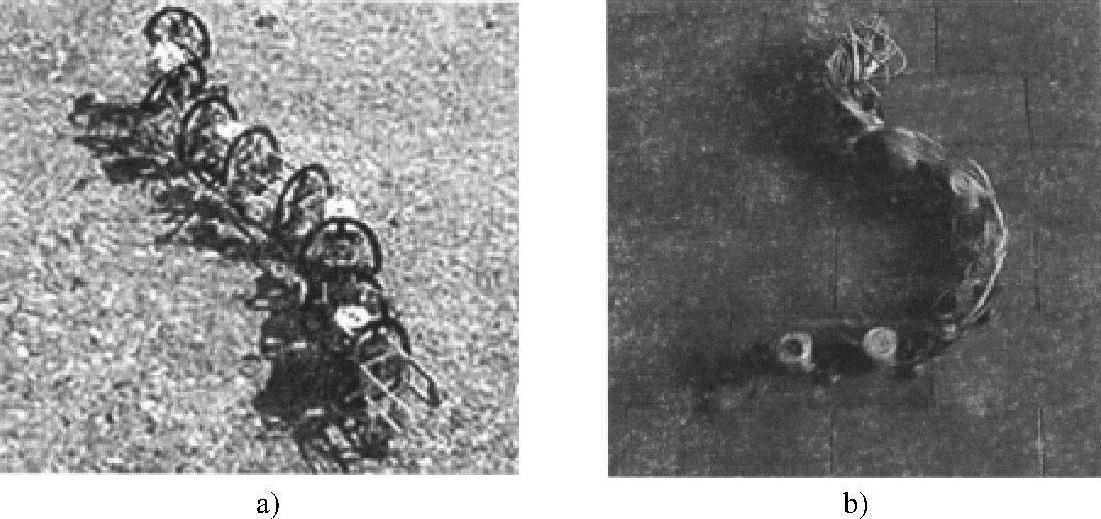
图8-25 蛇形机器人
a)英国蛇形机器人机构 b)蛇形机器人在爬行
在我国,蛇形机器人的研究刚刚起步,但是进步较快。哈尔滨工业大学机器人研究所、上海交通大学等单位首先进行了蛇形机器人仿生方面的一些研究工作。上海交通大学崔显世、颜国正于1999年3月研制了我国第一台微小型仿蛇机器人样机,该机构由一系列刚性连杆连接而成,步进电动机控制相邻两刚性连杆之间的夹角,使连杆可以在水平面内摆动,样机底面装有滚动轴承作为被动轮,用以改变纵向和横向摩擦系数之比,其后又相继做了一些相关的理论研究。
2001年,国防科学技术大学研制成功第一台蛇形机器人,如图8-26所示。这条长1.2m、直径0.06m、重1.8kg的机器蛇,能像生物蛇一样扭动身躯,在地上或草丛中蜿蜒运动,可前进、后退、拐弯和加速,其最大运动速度可达20m/min。头部是机器蛇的控制中心,安装有视频监视器,在其运动过程中可将前方景象传输到后方电脑中,科研人员则可根据同步传输的图像观察运动前方的情景,向机器蛇发出各种遥控指令。当这条机器蛇披上“蛇皮”外衣后,还能像真蛇一样在水中游泳。
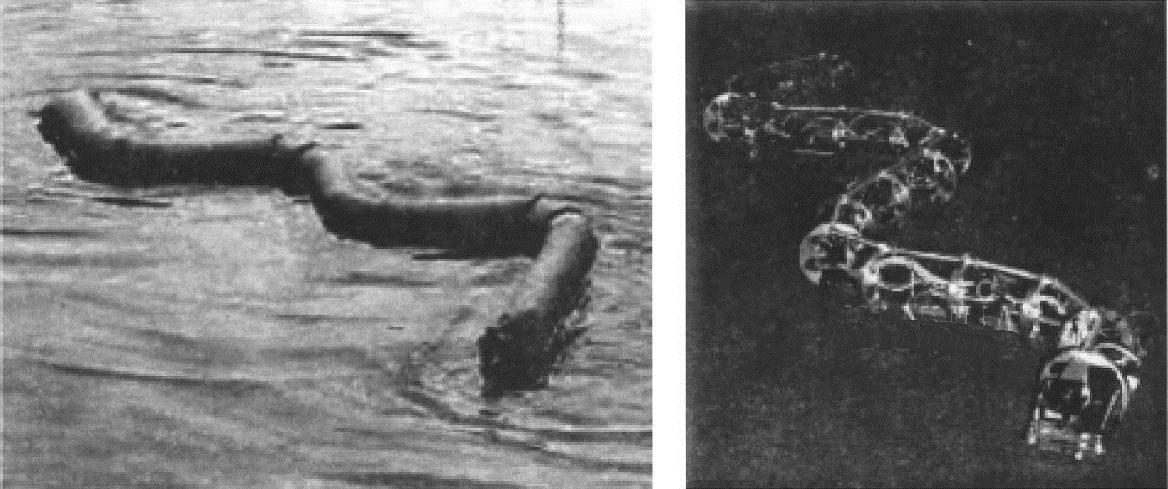
图8-26 国防科学技术大学的蛇形机器人
中科院沈阳自动化研究所机器人重点实验室也开始了蛇形机器人的研究,并提出一种新型蛇形机器人结构(见图8-27),可实现多种适应环境的平面和空间运动形式,并做了深入的理论研究。沈阳航天航空大学等单位也开始蛇形机器人的相关研究工作。

图8-27 中科院沈阳自动化所研制的蛇形机器人
2.仿生爬行机器人实例
图8-28所示为Strider爬壁机器人,具有4个自由度。结构上由左右两足、两腿、腰部和4个转动关节组成,其中3个关节儿、J3和J4在空间上平行放置,可实现抬腿跨步动作,完成直线行走和交叉面跨越功能。
Strider的每条腿各有一个电动机,通过微型电磁铁来实现两个关节运动的转换。每个电动机独立控制两个旋转关节足,关节间的运动切换通过一个电磁铁来完成。从图8-28中可以看出,Strider的左腿电动机通过锥齿轮传动分别实现腿绕关节J1或J2旋转,完成抬左脚或平面旋转动作;Strider的右腿电动机通过锥齿轮传动分别实现腿绕关节J3或J4旋转,完成抬右脚或跨步动作。以左脚为例,通过电磁铁控制摩擦片离合,实现摩擦片与抬脚制动板或腿支侧板贴合,控制抬脚锥齿轮的转动与停止,完成左腿两种运动的切换。抬脚锥齿轮转动则驱动关节J2,否则驱动J1旋转。该机构左右脚结构对称,运动原理相似,不同之处在于左脚J1和J2关节通过锥齿轮连接,而右脚的J3和J4关节通过带轮连接。
Strider的两足分别由吸盘、气路、电磁阀、压力传感器和微型真空泵组成,通过微型真空泵为吸盘提供吸力,利用压力传感器检测Strider单足吸附时的压力,以保证爬壁机器人可靠吸附。利用电磁阀控制气路的切换,实现吸盘的吸附与释放。每个吸盘端面上沿移动方向前后各装了一个接触传感器,用于调整足部吸盘的姿态,以保证与壁面的平行。
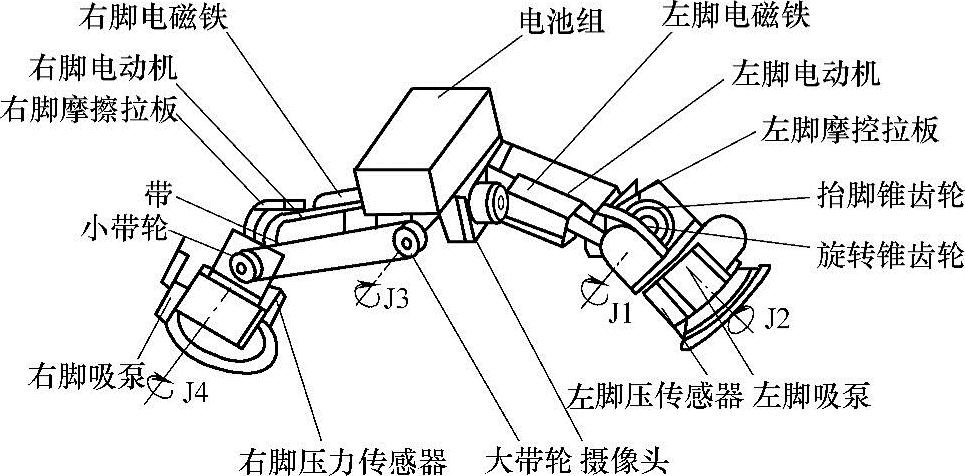
图8-28 Strider机构示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。