



仿生机器人必须有手,称之为仿生机械手,如图8-1所示。仿生机械手不仅是执行命令的机构,还应该具有识别的功能,这就是我们通常所说的“触觉”,对物体的软、硬、冷、热等的感觉是靠触觉传感器识别,并将所获得的信息反馈到大脑(计算机)里,以调节动作,使动作适当。
仿生机械手一般由手掌和手指组成。为了使它具有触觉,在手掌和手指上都装有多种传感器。如果要感知冷暖,还可以装上热敏元件。当触及物体时,传感器发出接触信号,否则就不发出信号。在各指节的连接轴上装有精巧的电位器,它能把手指的弯曲角度转换成“外形弯曲信息”,把外形弯曲信息和各指节产生的“接触信息”一起送入计算机,通过计算就能迅速判断机械手所抓物体的形状和大小。
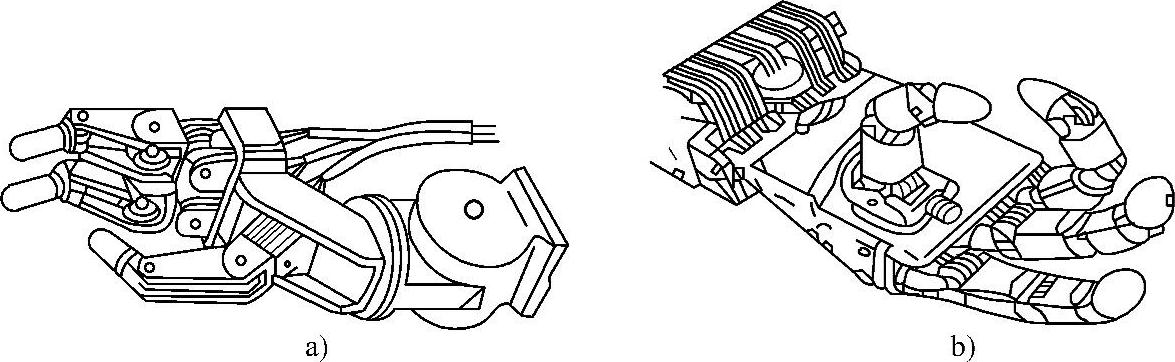
图8-1 仿生机械手
a)三指机械手 b)四指机械手
1.仿生机械手的机构组成
(1)仿生机械手机构的运动副及自由度 仿生机械手的机构一般为开链机构,由若干构件组成。构件之间通过某种连接来产生确定的相对运动,称两个构件间的可动连接为运动副。运动副所允许的两构件间的相对运动的个数称为运动副的自由度。
自由构件在三维空间中有6个自由度。那么,运动副的自由度数为0<f<6。运动副的分类方法有两种,一是按照运动副提供的自由度分类,二是按照运动副提供的约束数来分类。在仿生机械的结构分析中,常采用按照运动副约束数的分类方法。常见的运动副见表8-1。根据运动副提供的约束数目,可把运动副分为五类,分别为I、Ⅱ、Ⅲ、Ⅳ、V类副。
表8-1 常见的运动副
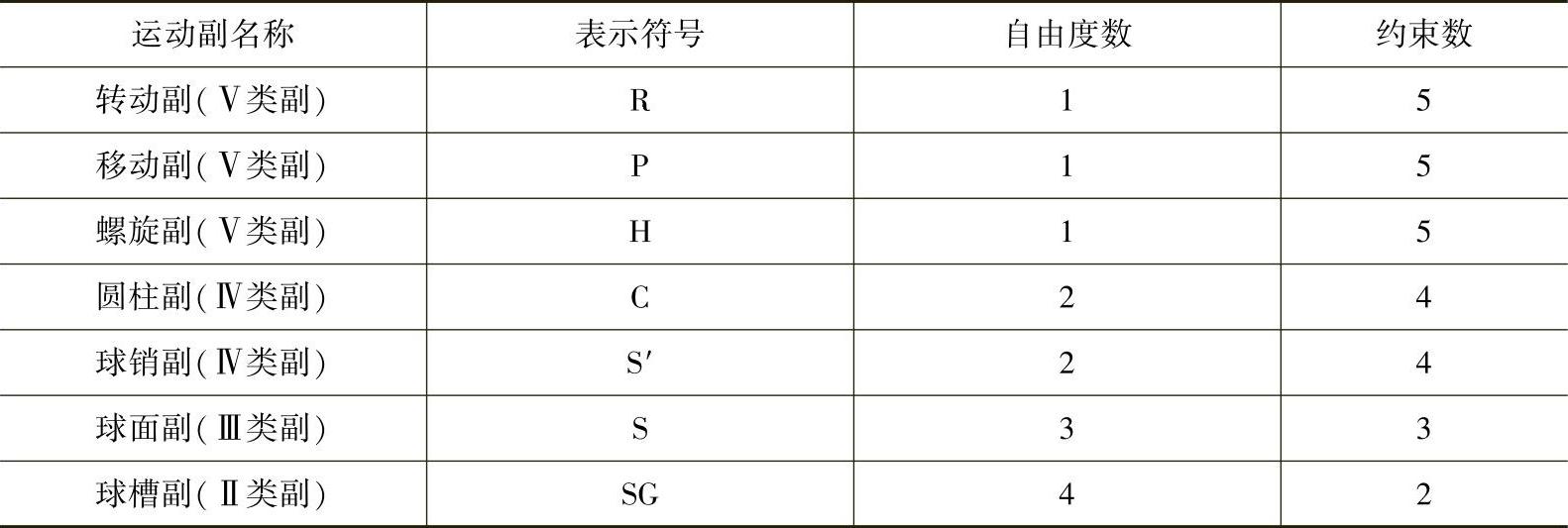
在仿生机械手中,由于各运动副中的运动变量都要借助于各种驱动器来实现,而无论是转动的或移动的驱动器又均为一个自由度,所以在仿生机械手中所采用的运动副类型,实际上常用转动副、移动副两种,个别被动运动副有时也可采用球面副。
多个构件用运动副连接后组成的可动构件系统称为运动链。如果形成运动链的各构件组成一个封闭的系统,则称为闭式运动链,如果运动链的各构件没有形成首尾封闭的系统,则称为开式运动链。在运动链中,如果有一个构件被指定为相对固定件或机架,则该运动链便成为一个机构。为了使机构具有确定的运动,必须使输入参数或输入构件的个数等于机构的自由度数。否则,机构的几何运动将不确定,或者将无法运动,甚至遭到破坏。
从仿生的观点出发,机械手、机器人较多地采用了空间开式运动链的机构。
(2)仿生机械手机构自由度 一个自由构件在空间具有6个自由度。若机构具有n个运动构件,那么,它们在未用运动副连接之前,共有6n个自由度。但是,当它们通过各种运动副连接起来组成为机构之后,构件的运动就要受到运动副的约束,其自由度数也随之减少。自由度减少的数目,应等于运动副引入的约束的数目,运动副约束数目则取决于运动副的种类。于是,空间机构的自由度可用下式计算:
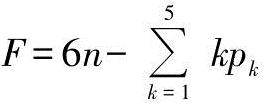
式中 F——机构的自由度;
n——运动构件数;
k——每个运动副引入的约束数;
pk——相应的运动副数目。
图8-2所示为人的手臂示意图。肱骨与肩部以球面副相连;尺、桡骨通过一个Ⅱ级副(球槽副)SR彼此相连,并分别用转动副和球面副与肱骨相连,形成肘关节;手掌简化成一个构件,它与尺、桡骨和5个手指骨均用能做两个相对转动的Ⅳ级副相连;各手指指骨间均用转动副彼此相连接。从工程的观点看,把人的手臂视作一个机构,或认为它是一种由许多构件组成的空间开式运动链。求解手臂机构的自由度。

由图8-2可知,人的手臂机构中,n=19,p1=0,pⅡ=1,pⅢ=2,pⅣ=6,pⅤ=11,故F=6×19-(2×1+3×2+4×6+5×11)=27。(https://www.xing528.com)
同理可求得手指部分的自由度为F=6×15-(4×5+5×11)=20。
由计算得知,人体上肢是自由度最多的一种开式运动链,适应能力很强。仿生机械手要模仿人的一个上肢有32块骨骼,由50多条肌肉驱动,由肩关节、肘关节、腕关节构成27个空间自由度,肩和肘关节构成4个自由度,以确定手的位置;腕关节有3个自由度,以确定手心的姿态。手由肩、肘、腕确定位置和姿态后,为了掌握物体做各种精巧、复杂的动作,还要靠多关节的五指和柔软的手掌;手指由26块骨骼构成20个自由度,因此手指可做各种精巧操作。
2.仿生机械手实例
人类与动物相比,除了拥有理性的思维能力、准确的语言表达能力外,拥有一双灵巧的手也是人类的骄傲。正因如此,让机器人也拥有一双灵巧的手成了科研人员的工作目标。如今,机器人的手具有了灵巧的指、腕、肘和肩胛关节,能灵活自如地伸缩摆动,手腕也会转动弯曲。通过手指上的传感器还能感觉出抓握的物体的重量,可以说已经具备了人手的许多功能。
图8-3所示为北京航空航天大学机器人研究所研制出的灵巧手,有三个手指,每个手指有3个关节,3个手指共9个自由度,由微电动机控制其运动,各关节装有角度传感器,指端配有三维力传感器,采用两级分布式计算机实时控制。该灵巧手配置在机器人手臂上充当灵巧末端执行器,扩大了机器人的作业范围,可完成复杂的装配、搬运等操作,如可以用来抓取鸡蛋,既不会使鸡蛋掉下,也不会捏碎鸡蛋。
在实际应用中,许多时候并不一定需要复杂的多节人工指,而只需要能从各种不同的角度触及并搬动物体的钳形指。1966年,美国海军就是用装有钳形人工指的机器人“科沃”把因飞机失事掉入西班牙近海的一颗氢弹从750m深的海底捞上来。
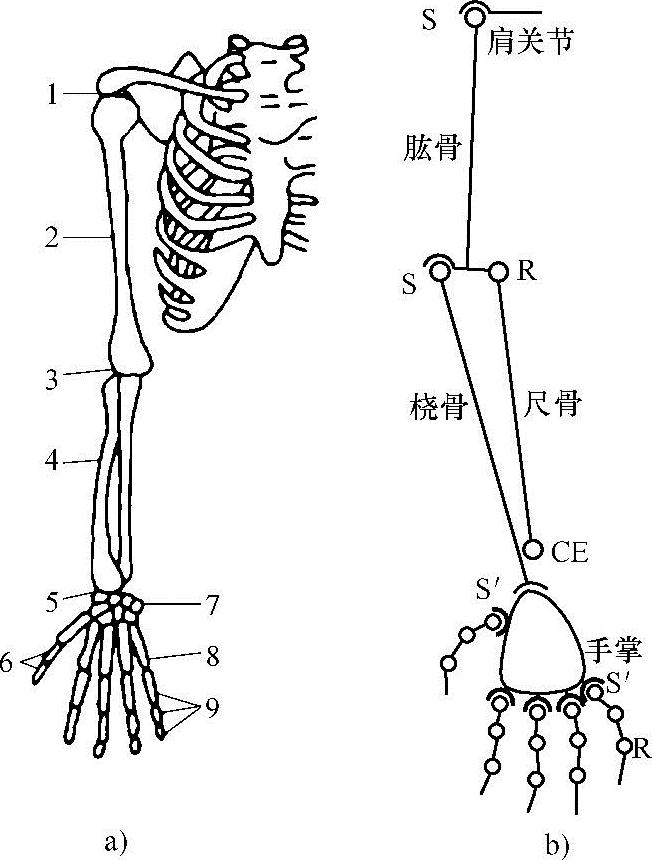
图8-2 人的手臂示意图
a)人体上肢骨骼 b)人体上肢骨骼机构
1—肩关节 2—肱骨 3—肘关节 4—尺、桡骨 5—腕关节 6—拇指骨 7—腕骨 8—掌骨 9—指骨
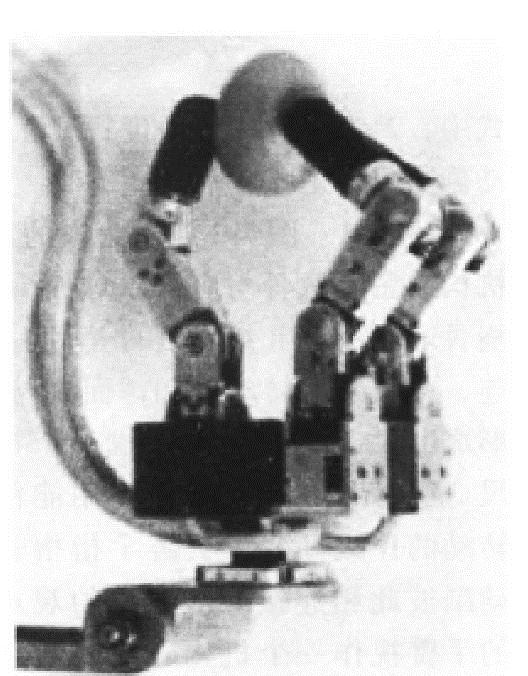
图8-3 灵巧手抓取鸡蛋
从仿生学的角度出发,探讨生物体灵巧运动的机理、生物体的运动特性,除了与生物体所具有的形状、特征有关外,还与它们内部特有的骨骼—肌肉系统以及控制它们的神经系统密切相关。为实现骨骼—肌肉的部分功能而研制的制动装置称为人工肌肉制动器。为更好地模拟生物体的运动功能或在机器人上应用,已研制出了多种人工肌肉。一类称为机械化学物质(mechanochemicals)的高分子物质(如高分子凝胶),它在电刺激下能反复伸缩将化学能直接转化为动能产生机械动作;形状记忆合金(SMA)受温度影响会像肌肉那样伸缩,并根据通过合金丝中电流总量的大小调节刚度。另一类也是目前大量开发应用的人工肌肉——气动人工肌肉(Rub—be-rActuator)。1975年日本Bridgestone公司推出一种寿命达106次的人工肌肉产品,如图8-4a所示,它有两层,里层是橡胶管,外层是纤维编织网套。两端用金属夹箍固定。夹箍内有气路,由此传导压缩空气。管内压力上升时,肌肉沿径向膨胀,并沿轴向收缩,于是产生收缩力。此外,1984年一种具有高度柔顺性的、采用气动人工肌肉的致动器开始问世,其结构原理如图8-4b所示。
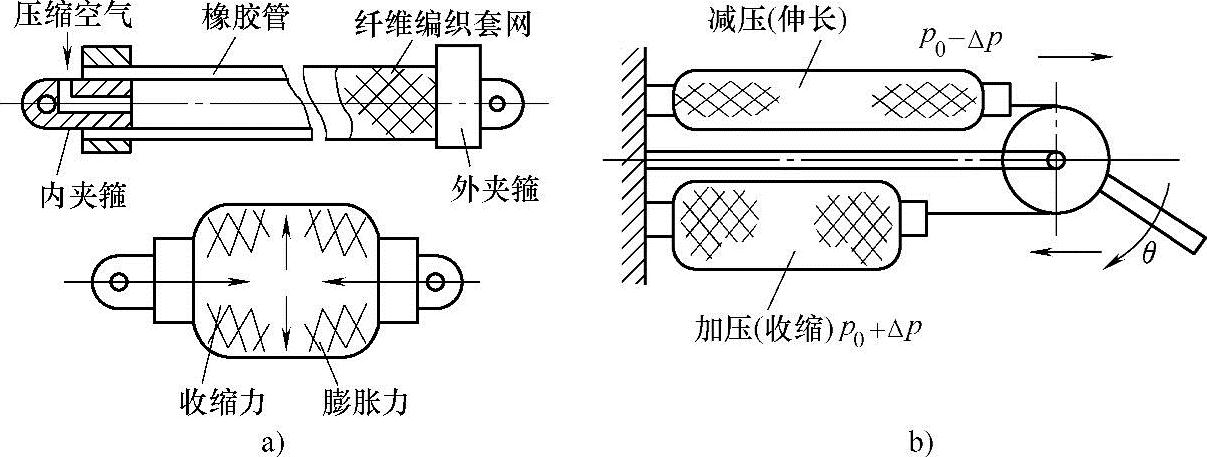
图8-4 人工肌肉简图
a)人工肌肉的构造图 b)人工肌肉致动器
1988年,日本东芝会社开发出一种尺寸更小的、供微型机器人和多指多关节手使用的微型气动人工肌肉,如图8-5所示。它的长度通常为数厘米,外径为数毫米,管壁采用硅橡胶并添加芳族聚酰胺增强纤维(arimidfiber)。管内有三个相互隔离的空腔,可分别送入压缩空气形成压力室。增强纤维编织线的走向,使肌肉具有明显的各向异性力学特征。通过选择这种微型人工肌肉编织纤维的螺旋角α,调节其内压匹配可以实现任意方向的弯曲、曲率和伸长量、绕轴线的扭转3个自由度的运动控制。据报道,已有一台用微型人工肌肉制成的7自由度操作手实验样机问世。还有一种三指11关节手与人手尺寸相近,质量仅600g。全部致动器容纳在手掌空间中,结构十分紧凑。
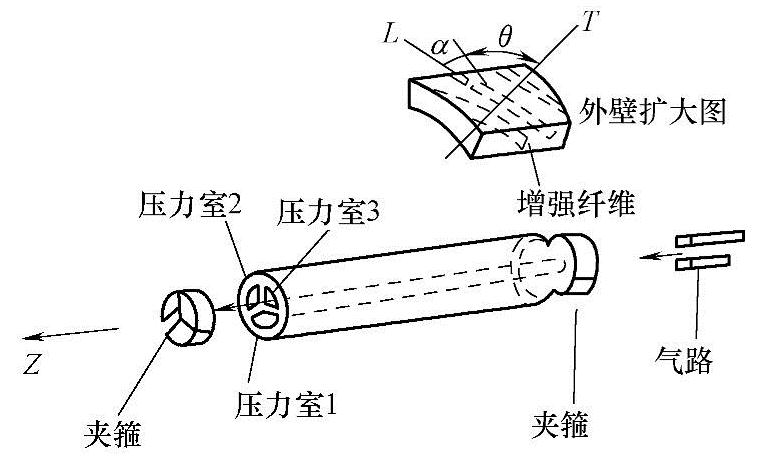
图8-5 微型气动人工肌肉结构图
加拿大Mac Donald Dettwiler&As—sociates公司在1987年发布了一种名为ROMAC(Robotic Muscle Actuator)的人工肌肉制动器专利(见图8-6),它更像一个可变形气囊,由压缩空气驱动也能进行位置和力的独立控制。它在功率重量比和响应速度上比Rubber-Actuator更高、更快,滞回更低,而最大收缩率高达50%。
图8-6a、b分别表示了ROMAC在伸长和收缩时的形状。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。