



现代设计对精度提出越来越高的要求,通过结构设计可以减小由于制造、安装等原因产生的原始误差,减小由于温度、磨损、构件变形等原因产生的工作误差,减小执行机构对各项误差的敏感程度,从而提高产品的精度。
1.误差均化
制造和安装过程中产生的误差是不可避免的,通过适当的结构设计可以在原始误差不变的情况下使执行机构的误差较小。试验证明螺旋传动的误差可以小于螺杆本身的螺距误差。图4-26所示为千分尺的测量误差与其螺距误差的对比图,图4-26a为千分尺的累积测量误差,图4-26b为通过万能工具显微镜测得的该千分尺螺杆的螺距累积误差。这一试验说明了关于机械精度的均化原理:在机构中如果有多个连接点同时对一种运动起限制作用,则运动件的运动误差决定于各连接点的综合影响,其运动精度高于一个连接点的限制作用。在一定条件下增加螺旋传动中起作用的螺纹圈数,使多圈螺纹同时起作用,不但可以提高螺旋传动的承载能力和耐磨性,而且可以提高传动精度。

图4-26 千分尺测量误差与螺距误差对比
2.误差合理配置
在机床主轴结构设计中,提高主轴前端(工作端)的旋转精度是很重要的设计目标,主轴前支点轴承和主轴后支点轴承的精度都会影响主轴前端的旋转精度,但是影响的程度不相同。通过图4-27可知,前支点误差所引起的主轴前端误差为
后支点误差δB所引起的主轴前端误差为


图4-27 轴承精度对主轴精度的影响
显然前支点的误差对主轴前端的精度影响较大,所以在主轴结构设计中通常将前支点的轴承精度选择得比后支点高一个等级。
3.误差传递
在机械传动系统中,各级传动件都会产生运动误差,传动件在传递必要运动的同时也不可避免地将误差传递给下一级传动件。在如图4-28所示的多级机械传动系统中,假设各级的运动误差分别为δ1、δ2、δ3,输入运动为ω1,则输出运动为

图4-28 多级机械传动系统

其中第一项是传动系统需要获得的运动,其余三项为运动误差。通过对误差项的分析可见各误差项对总误差的影响程度不同,如果传动系统为减速传动(i>1),则最后一级传动所产生的运动误差对总误差影响最大,所以在以传递运动为主要目的的减速传动系统设计中通常将最后一级传动件的精度设计得较高,反之在加速传动系统(i<1)中第一级传动所产生的传动误差对总误差影响最大,在这样的传动系统中通常将第一级传动件的精度设计得较高。
4.误差补偿
在机械结构工作过程中,会由于温度变化、受力、磨损等因素使零部件的形状及相对位置关系发生变化,这些变化也常常是影响机械结构工作精度的原因。温度变化、受力后的变形和磨损等过程都是不可避免的,但是好的结构设计可以减少由于这些因素对工作精度造成的影响。在图4-29所示的两种凸轮机构设计中,凸轮和移动从动件与摇杆的接触点上都会不可避免地发生磨损,图4-29a的结构使得这两处磨损对从动件的运动误差相互叠加,而图4-29b的结构则使得这两处磨损对从动件的运动误差的影响互相抵消,从而提高了机构的工作精度。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-29 凸轮机构磨损量补充
5.采用误差较小的近似机构
有些应用中为简化机构而采用某些近似机构,这会引入原理误差,在条件允许时优先采用近似性较好的机构可以减小原理误差。图4-30所示的两种凸轮近似机构都可以得到手轮的旋转运动与摆杆摆动角之间的近似线性关系。图4-30a为正切机构,这种机构中手轮的旋转角φ与摆杆摆角θ之间的关系为

图4-30b为正弦机构,这种机构中手轮的旋转角φ与摆杆摆角θ之间的关系为

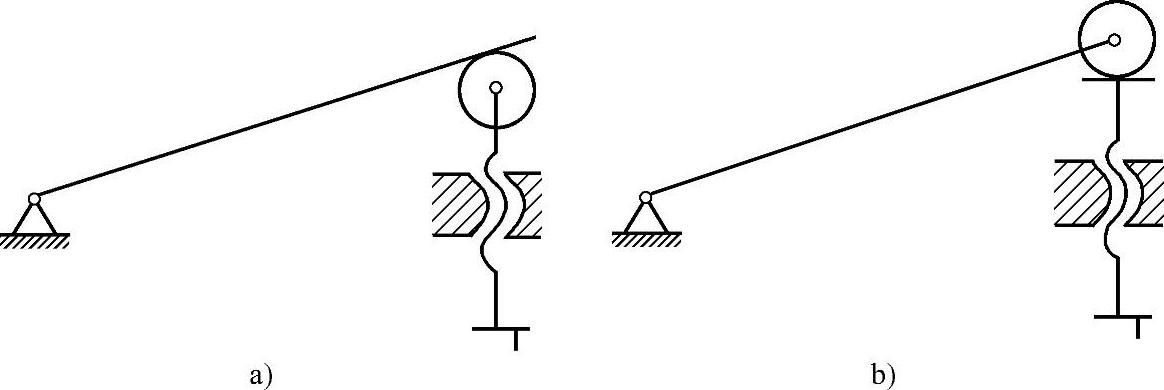
图4-30 凸轮近似机构
a)正切机构 b)正弦机构
从公式可以明显看到正弦机构的原理误差比正切机构的原理误差小一半,而且螺纹间隙引起的螺杆摆动基本不影响摆杆的运动,说明采用正弦机构比采用正切机构能获得更高的传动精度。
6.零件分割
为保证运动副正常工作,很多运动副(如齿轮、螺旋等)工作表面间需要必要的间隙,但是由于间隙的存在,当运动方向改变时,因工作表面的变换,使得被动零件运动方向的改变滞后于主动零件,产生了回程误差。
回程误差是由间隙引起的,而间隙是运动副正常工作的必要条件,间隙会随着磨损而增大,减小(或消除)运动副的间隙可以减小(或消除)回程误差。
图4-31所示为车床托板箱进给螺旋传动间隙调整机构。在此结构中将螺母沿长度方向分割为两部分,当由于磨损使螺纹间隙增大时,可以通过调整两部分螺母之间的轴向距离使其恢复正常的间隙。调整时首先松开图中左侧固定螺钉,拧紧中间的调整螺钉,拉动楔块上移,同时通过斜面推动左侧螺母左移,使螺纹间隙减小,从而减少回程误差。图4-32所示的螺旋传动间隙弹性调整结构将楔块改为压缩弹簧,可以实时消除螺纹间隙,消除回程误差。将一个零件分割为两部分,通过两部分之间的相对位移可以减小或消除啮合间隙,从而减小或消除回程误差。
图4-31 螺旋传动间隙调整结构

图4-32 螺旋传动间隙弹性调整结构
图4-33所示为消除齿轮啮合间隙的齿轮结构。结构中将原有齿轮沿宽度方向分割成两个齿轮,两半齿轮可相对转动,两半齿轮通过弹簧连接,由于弹簧的作用,使得两半齿轮分别于相啮合齿轮的不同齿侧相啮合,弹簧的作用是消除啮合间隙,并可以及时补偿由于磨损造成的齿厚变化。这种齿轮传动机构由于实际作用齿宽较小,承载能力较小,通常用于以传递运动为主要目的的齿轮传动装置中。

图4-33 消除齿轮啮合间隙结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。