



将机构转化为一般化运动链后,可以得到一个或几个运动链,每一个运动链中包含不同数量的运动副和杆,这些运动链的总和称为连杆类配。运动链中的连杆类配可以表示为
LA(L2/L3/L4/L5/…/Ln)
式中,L2、L3、…、Ln分别表示具有2个运动副、3个运动副、…、n个运动副的连杆数量。
连杆类配可分为以下两种:
(1)自身连杆类配 指原始机构的一般化运动链(简称原始运动链)的连杆类配。
(2)相关连杆类配 按运动链自由度不变的原则,由原始运动链推出与其有相同连杆数和运动副数的连杆类配,据此原理,可以给出相关连杆类配应满足的两个方程式:
L2+L3+L4+L5+…+Ln=N(连杆数量不变)
2L2+3L3+4L4+5L5+…+nLn=2J(运动副数量不变)
式中,N为连杆中连杆总数;J为运动链中的运动副总数。
下面以六杆机构为例进行运动链连杆类配。
设:自由度F=1,杆件数N=6,运动副数J=7,假设没有复合铰链,则(https://www.xing528.com)
3(N-1)-2J=F=1
设具有n个运动副的杆件数量为Ln,则
L2+L3+L4+L5+…+Ln+…=N=6
2L2+3L3+4L4+5L5+…+nLn+…=2J=14
分析表明,如果取其中一个杆件的运动副数量≥5,即使其余杆件的运动副数量均为最小(=2),也会使总运动副数量大于14,与假设出现矛盾,所以只可能有一两种可能的解答:
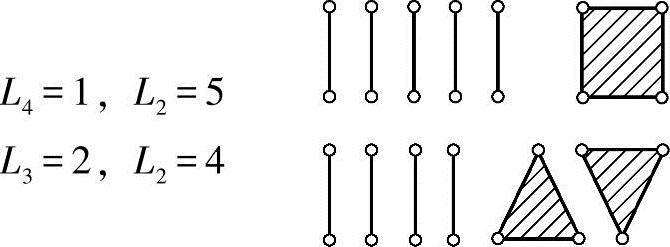
以上两种类配方案可以表示为LA=(5/0/1)和LA=(4/2)。由LA=(5/0/1)组成的运动链如图3-84所示,其左面3个杆没有相对运动,而形成一个桁架结构。因此,这一运动链实际上退化为一个自由度的机构,不再是六杆机构,应该予以剔除。所以六杆机构的解答只有一种方案,即LA=(4/2)。
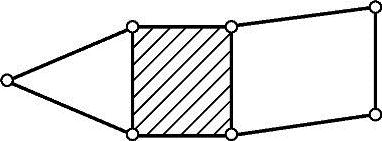
图3-84 LA=(5/0/1)组成的运动链
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。