



机构的移植是指传动原理的移植,主要有啮合原理的移植、差动原理的移植、谐波传动原理的移植等。
齿轮机构的啮合传动具有传动可靠、平稳、效率高的特点,但不便于远距离传动。带传动可以实现远距离传动,但摩擦传动不可靠,效率低。如果移植了齿轮传动的啮合原理,把刚性带轮与挠性带设计成相互啮合的齿状,就产生了齿形带,即同步带传动。
1.差动原理的移植
差动原理经常用于齿轮传动,被称作差动轮系,用于运动的合成与分解。例如汽车后轮的差速机构,其工作原理是将发动机输出的运动分解给两个车轮,使两个车轮的运动能适应各种转弯与直行功能。
差动原理还可以用于螺旋机构、凸轮机构、含挠性件的传动机构、间歇运动机构等,其差动原理与差动齿轮机构相同。
图3-71所示是差动螺旋机构常用的三种形式。图3-71a是同轴单螺旋传动,机构由螺杆、螺母、机架组成。螺杆与机架组成转动副,螺杆与螺母组成螺旋副。工作时,同时输入螺杆与螺母的转动,结果实现螺母的差动移动。即螺杆转动一周,螺母转动Δn周,则螺母移动的距离为S±ΔS(S为螺旋的导程,负号表示螺杆和螺母转动方向相同,正号则表示相反)。该机构结构简单,可以实现微动和快速移动,常用于高精度机床的螺距误差校正机构,以及组合机床端面的机械动力头。

图3-71 常用差动螺旋机构
图3-71b是同轴双螺旋传动,也是由螺杆、螺母、机架三构件组成,其中螺杆与机架一端组成转动副,另一端组成螺旋副;螺母与机架组成移动副;螺杆与螺母组成螺旋副。当螺杆转动一周时,螺母移动距离为:S1±S2(S1与S2分别为两个螺旋的导程,正号表示两螺旋向相反,负号则表示相同)。该机构常用于仪器中的微调机构。
图3-71c所示也是同轴双螺旋传动,两个螺母都与机架组成移动副,但两个螺母旋向相反,工作时,螺杆转动,两螺母实现快速分离或合拢。该机构常用于机车车厢之间的连接,可以使车钩较快地连接或脱开,也常用作台钳夹紧机构。
图3-72为差动螺旋机构的应用实例,其中图3-72a是镗床中镗刀的微调机构。图3-72b为车辆连接器;图3-72c为台钳夹紧机构。
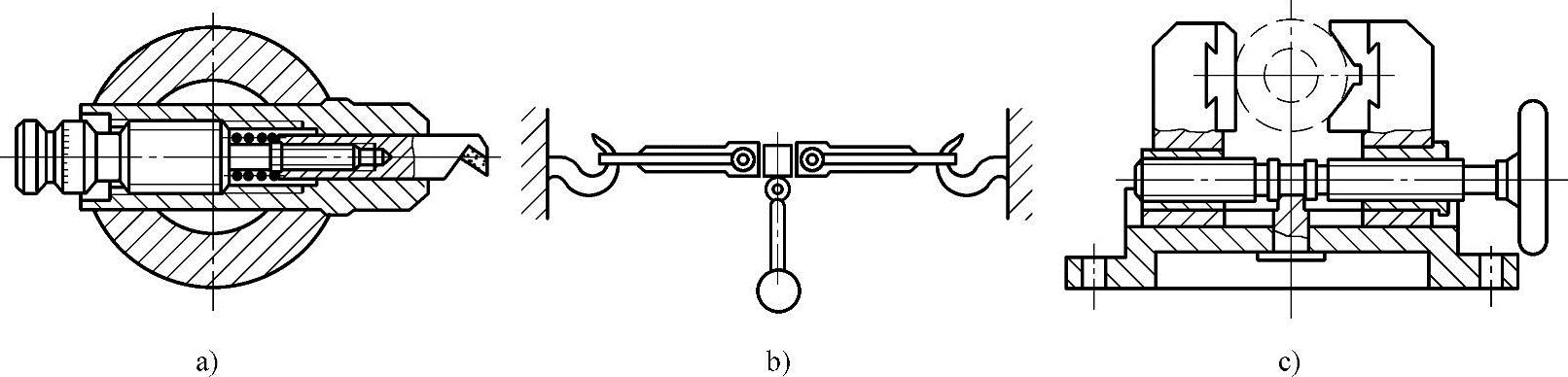
图3-72 差动螺旋机构的应用
a)镗刀的微调机构 b)车辆连接器 c)台钳夹紧机构
图3-73所示是一种凸轮差动机构,该机构由三个不同轴转动的构件组成,它们分别是外凸轮1、推杆2和凸轮3。内外凸轮的凸凹轮缘上均布数量不等的齿槽,一般为奇数;推杆沿内外凸轮之间的圆周布置,一般布置偶数个带有滚子的推杆,推杆的个数为两凸轮的齿槽数量之和的约数。例如,内凸轮3有13个齿槽,外凸轮有11个齿槽,则推杆个数为:(13+11)/3=8。机构工作时,沿圆周连在一起的推杆和两个凸轮之一输入转动,另一个凸轮则输出转动。
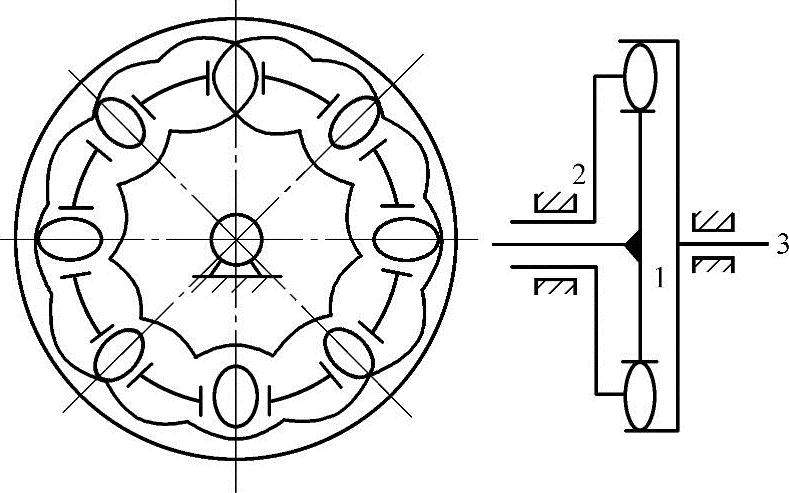
图3-73 凸轮差动机构
1—外凸轮 2—推杆 3—凸轮
图3-74是挠性件差动机构。圆柱形滚轮2绕固定轴A转动,盘1绕固定B轴转动,盘1上装有6个尺寸相同的滚轮3,另外盘上还安装了两个导向轮5,滚轮2、3、5的轮缘上安装有挠性构件4,滚轮2和盘1输入运动,滚轮3输出2、1两个运动的合成。
2.谐波传动的移植(https://www.xing528.com)
谐波传动靠中间挠性构件(柔轮)的弹性变形来实现运动与动力的传递。这种传动原理常用于齿轮传动,也可以移植到螺旋与摩擦传动中。
图3-75是一种谐波齿轮传动,基本构件有柔轮1、刚轮2和波发生器H。其中波发生器为主动件,柔轮为从动件,刚轮固定。柔轮形状为圆环形,齿数z1,刚轮齿数z2,比z1略大,波发生器的形状根据工作要求确定,有双波的和三波的,有凸轮式和滚轮式机构。由于波发生器的引入,迫使柔轮产生弹性变形,使其长轴两端的齿完全与刚轮啮合,短轴两端的齿完全脱离,位于长短轴之间的齿处于啮入或啮出的过度状态。当波发生器转动时,随着柔轮变形部位的变更,使得柔轮与刚轮之间在啮入、啮合、啮出、脱离四种状况中不断变化,从而使柔轮相对于刚轮按波发生器相反方向运动。该机构输出的传动比为iH1=-z1/(z2-z1),传动比范围为50~500。
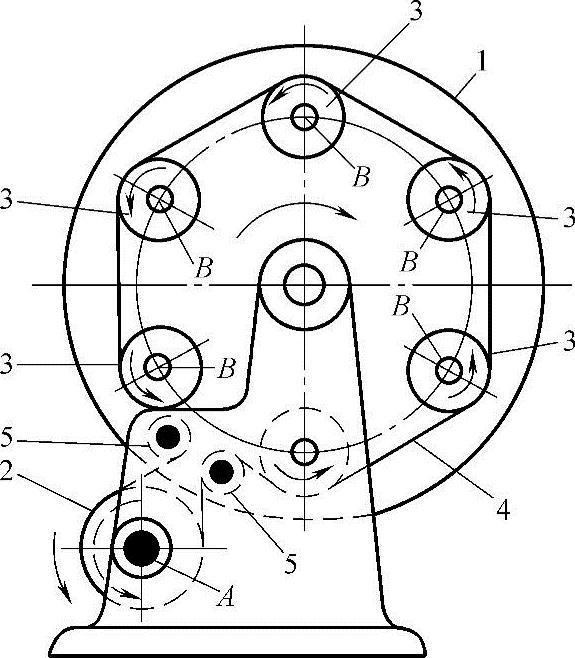
图3-74 挠性件差动机构
1—盘 2、3、5—滚轮 4—挠性构件
图3-76是三波谐波齿轮传动,并且柔轮为内齿轮,刚轮为外齿轮,波发生器设在外圆周上。
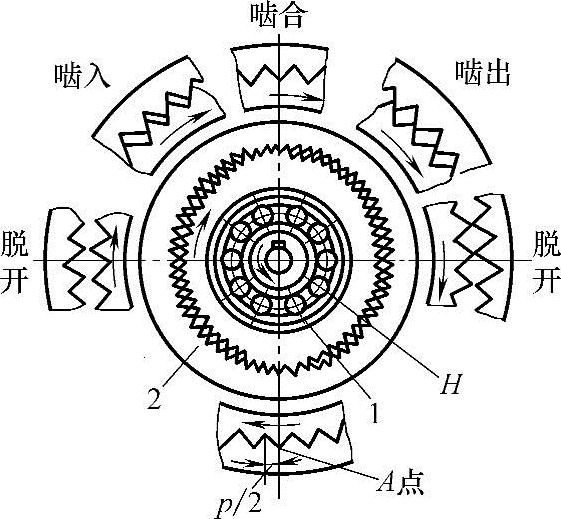
图3-75 谐波齿轮传动(1)
1—柔轮 2—刚轮
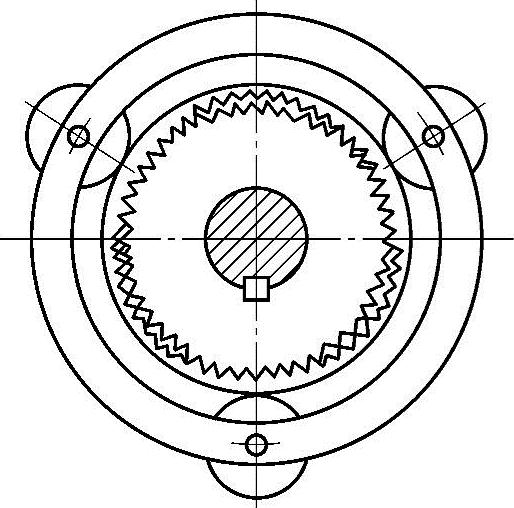
图3-76 谐波齿轮传动(2)
将谐波传动原理用于螺旋传动,则为谐波螺旋传动。它可以实现变转动为缓慢的移动,或相反;也可实现转动的减速。图3-77是将转动变为缓慢移动的谐波螺旋传动,其中H为波发生器,其截面形状为椭圆形;1为薄壁螺杆(柔性螺杆),原始形状为环状圆柱形。2为刚性螺母,为固定件。1与2的螺纹形状、螺距及旋向均相同。当波发生器转动时,由于柔性螺杆的变形,使其与刚性螺母之间产生螺纹周长之差,致使柔性螺杆1沿螺纹平均半径产生无滑动的滚动,并将转过不大的角度。波发生器的转角和柔轮1的转角之比为机构的传动比,其值取决于波发生器的椭圆轴的尺寸差和螺纹的平均半径。若螺杆只做移动,不转动,则其轴向位移量约为0.0025~0.1mm。
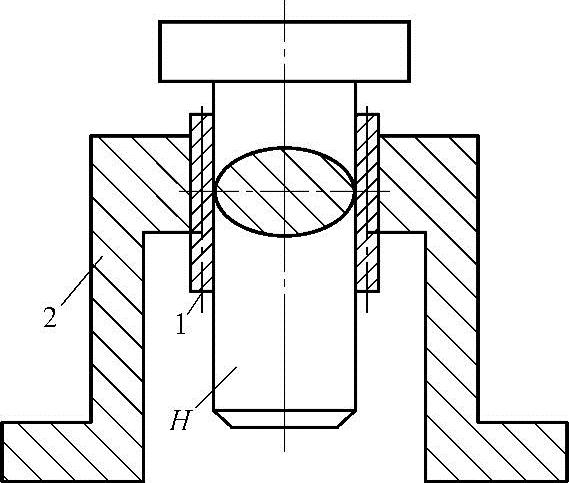
图3-77 谐波螺旋传动(1)
1—薄壁螺杆 2—刚性螺母
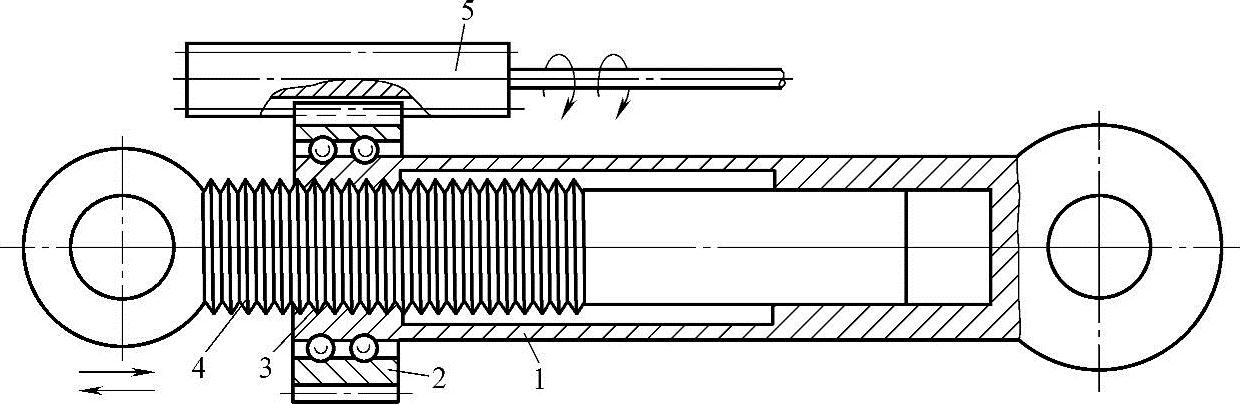
图3-78 谐波螺旋传动(2)
1—套管 2—滚珠发生器 3—柔性螺母 4—刚性螺杆 5—齿轮
图3-78是一种用于运动转换的谐波螺旋传动机构。2为双排配置的滚珠发生器,其外表面为与齿轮5啮合的齿轮轮缘。3为柔性螺母并与套管1固接为一体;4为刚性螺杆;1与4的端部有铰链副元素。当齿轮5输入转动时,可使螺杆和套管获得转动或摆动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。