



1.全转动副的四杆机构机架变异
图3-29所示为由一种全转动副的四杆机构改变机架得到的4种连杆机构。

图3-29 全转动副的四杆机构机架变异
a)、c)为曲柄摇杆机构 b)为双曲柄机构 d)为双摇杆机构
某光学仪器厂为了把棱镜边缘磨制成半圆形,需要设计一套装置,每20s正反转180°。
该厂研制的装置如图3-30a所示。电动机输出的转速经带传动和蜗杆传动减速,传递到蜗轮z1的转速为3r/min。设计一曲柄摇杆机构,其两极限位置如图3-30b、c所示,摇杆机构两极限位置之间的转角为β1-β2。设计一齿轮传动,使其齿数为 。
。
双曲柄机构的运动特性如图3-31所示。连杆延长线上点E的运动轨迹近似为一条直线。这种机构可以用于起重、堆料或传递物件的设备。图3-31中,电动机带动圆盘转动,圆盘上的销在摇杆的槽中使其摆动。连杆的端点E装有推料头。摇杆在范围α内转动时,推料头在E′—E范围内做近似直线运动,实现推料工作。
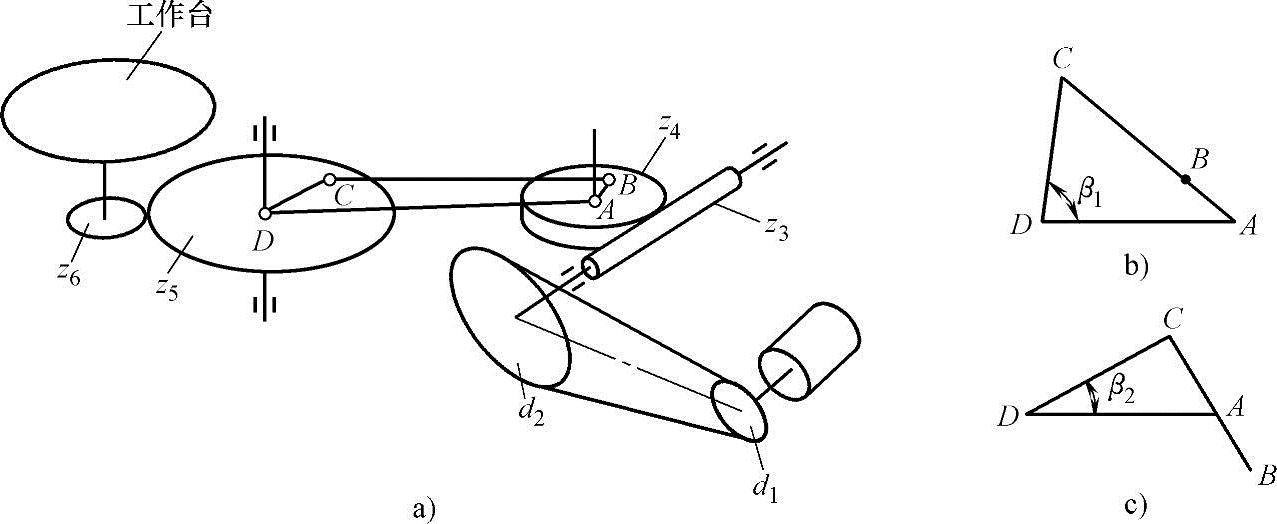
图3-30 利用曲柄摇杆机构的正反转180°工作台
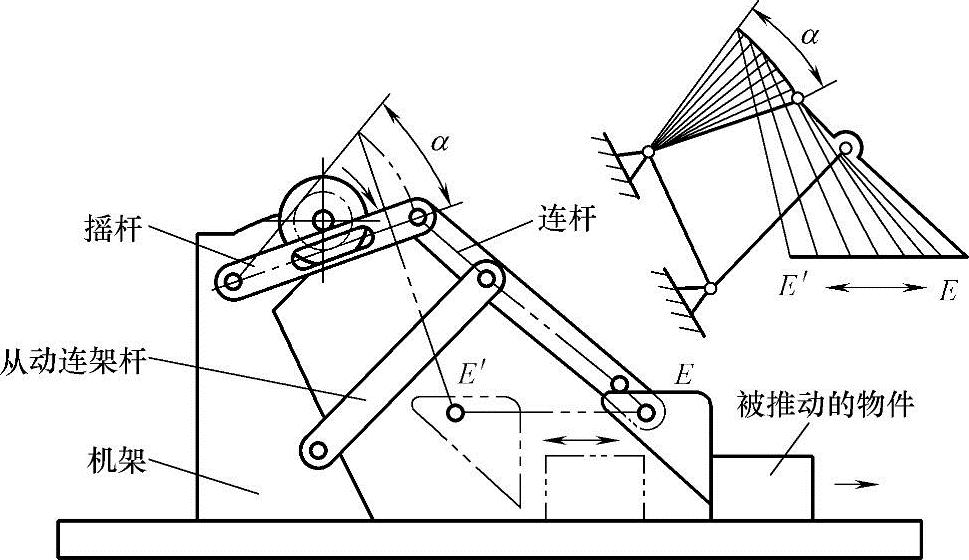
图3-31 不等长双摇杆机构用于堆料设备
2.含一个移动副的四连杆机构机架变异
含一个移动副的四连杆机构也是一种使用广泛的结构形式。图3-32a所示为曲柄滑块机构,当曲柄为主动件时,可以把回转运动变成直线往复运动,如活塞式水泵、压缩机;当滑块为主动件时,可以把直线往复运动变成回转运动,如内燃机。图3-32b~d都是曲柄导杆机构,杆1是固定件,杆2是主动件,杆4为导杆。其中,图3-32b中的杆2和杆4都可以旋转360°,这种机构用于旋转液压泵;图3-32c中的杆2是主动件,杆4为导杆,只能做摆动,这种机构有急回的运动特性,用于牛头刨床或插床的主体运动机构;图3-32d是曲柄摇块机构,一般以杆1或杆4为主动件,做转动或摆动,导杆4相对于滑块3做移动并与滑块一起绕C点摆动,此时C称为摇块。图3-32e是移动导杆机构,一般以杆1为主动件,用于抽水机和液压泵。
图3-33是两种汽车自动卸料的机构。其中,图3-33a采用了双摇杆机构,杆AD为车架,是静止件;AB和CD是摇杆。当活塞从液压缸向右伸出时,使摇杆摆动,车斗左边抬起,使车斗内物品自动卸下;活塞向左缩回时,摇杆反转,车斗复原。图3-33b采用了曲柄摇块机构(见图3-32d),BC为固定件,活塞杆是导杆,液压缸为摇块,可以绕点C转动。当液压缸推动活塞杆向右上方伸出时,车斗绕点B转动,使物品自动卸下;活塞向左缩回时,车斗反转,车斗复原。
3.双滑块机构机架变异
图3-34给出了4种双滑块机构机架变异的结构。其中,图3-34a为双滑块机构,常用于椭圆画图仪器;图3-34b为双转块机构,常用于十字滑块联轴器(见图4-13);图3-34c为正弦机构(见图3-35a);图d为正切机构(见图3-35b)。
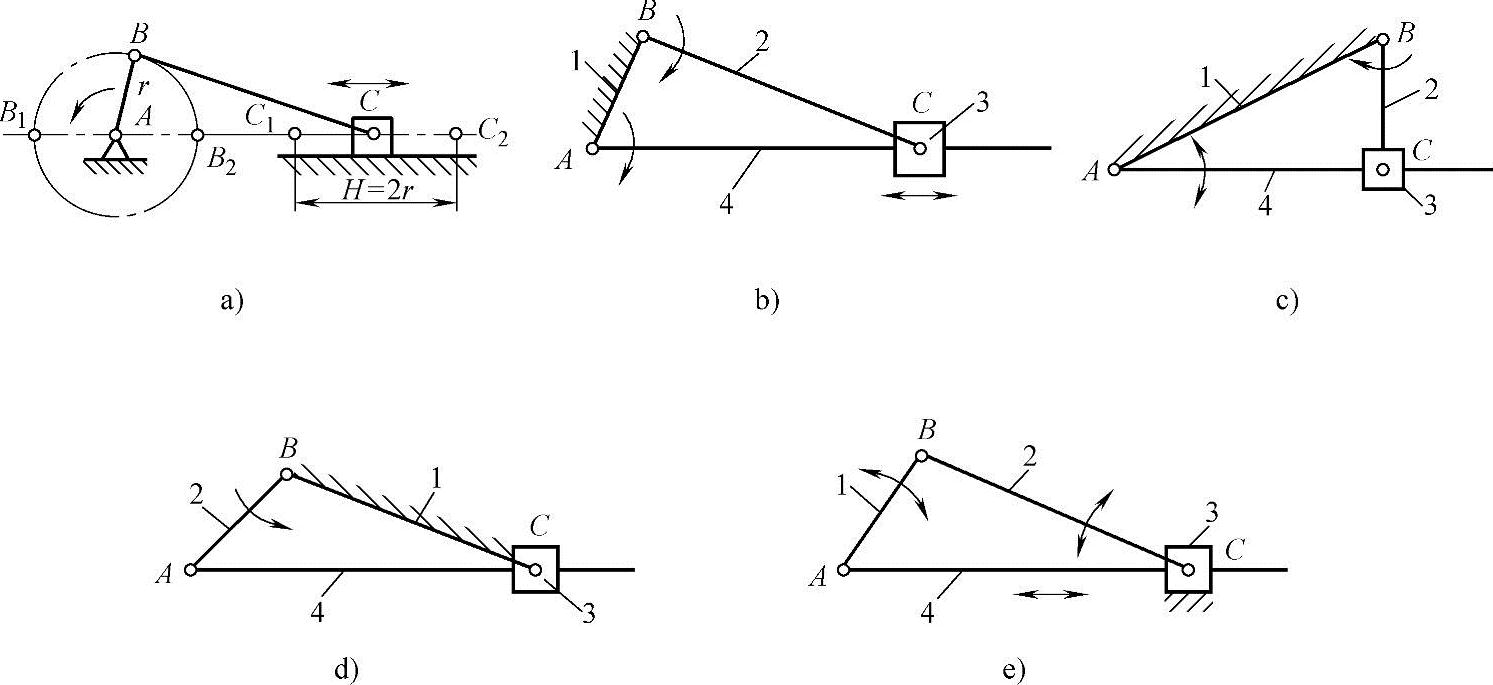
图3-32 含一个移动副的四连杆机构(https://www.xing528.com)
a)曲柄滑块机构 b)转动导杆机构 c)摆动导杆机构 d)曲柄摇块机构 e)移动导杆机构
1、2、4—杆3—滑块
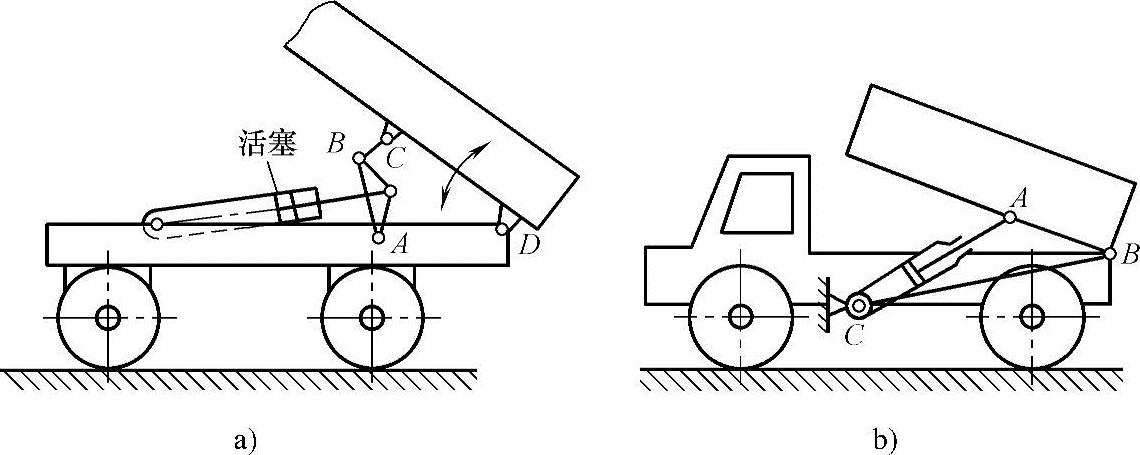
图3-33 两种汽车自动卸料的机构
a)采用双摇杆机构 b)采用曲柄摇块机构
4.其他机构机架变异
在机构设计中广泛运用机架变异的方法,如定轴轮系变异成为行星轮系(见图3-36)。图3-37示出了螺旋传动中固定不同零件得到不同的效果。
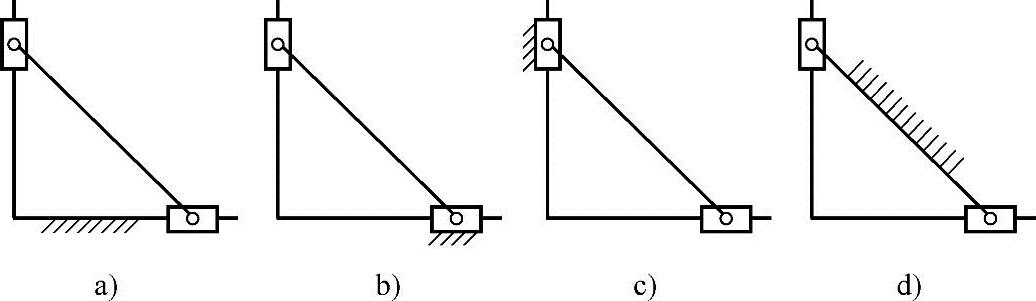
图3-34 双滑块机构变异
a)双滑块机构 b)双转块机构 c)正弦机构 d)正切机构
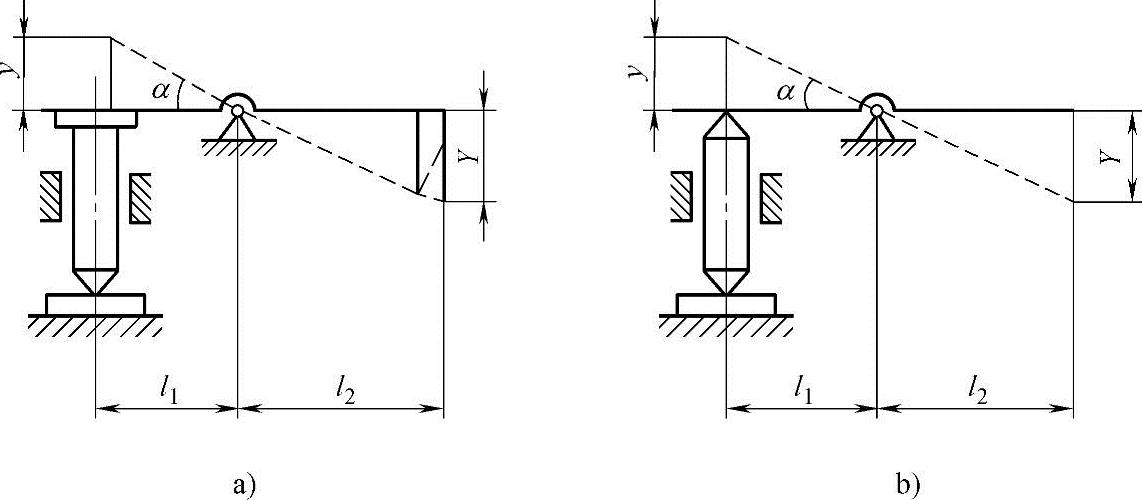
图3-35 简单对应杠杆式放大机构(用于测量仪器)
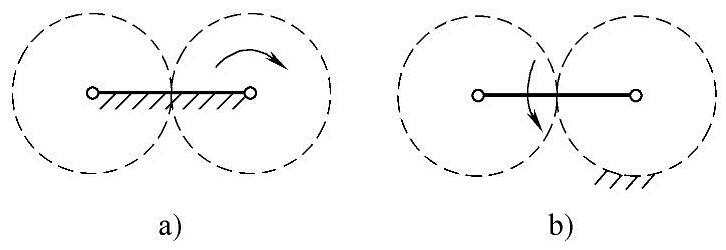
图3-36 定轴轮系变异成为行星轮系
a)定轴轮 b)行星轮系
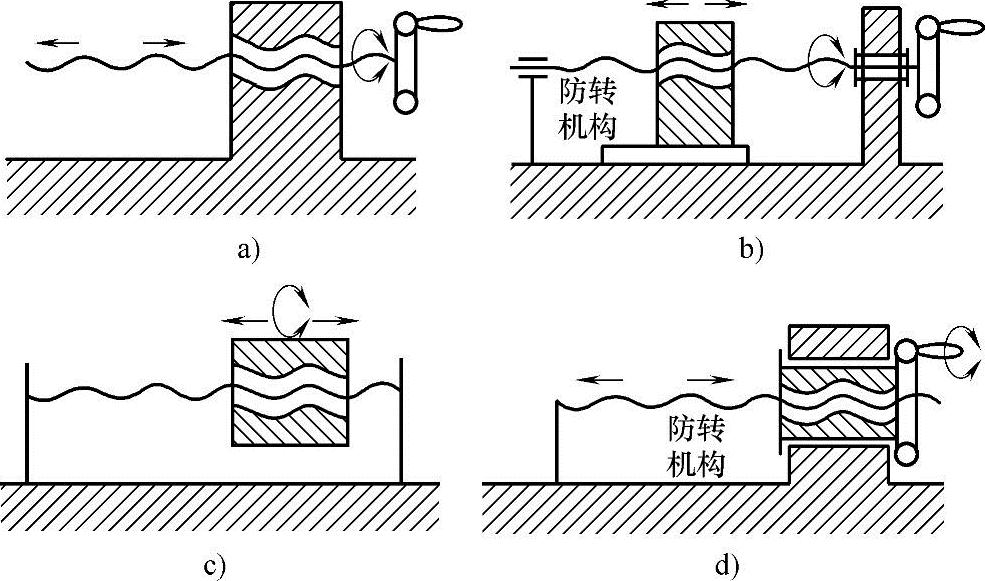
图3-37 螺旋传动机架变异
a)螺母固定,螺杆转动+移动 b)螺杆转动,螺母移动 c)螺杆固定,螺母转动+移动 d)螺母转动,螺杆移动
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。