



机构并联组合中由两个或多个结构相同的基本机构并列布置,按输入和输出机构的不同安排,有如图3-11所示的几种结构形式。

图3-11 并联机构的类型
a)Ⅰ型并联 b)Ⅱ型并联 c)Ⅲ型并联
1.Ⅰ型并联
Ⅰ型并联是指当一个原动机功率不足时,可以采用多套传动系统,如图3-11a所示。例如,中华世纪坛转动部分重3000余吨,装有192个车轮,如果只以其中一个车轮为主动轮,则地面的摩擦力有限,不足以产生足够的驱动力。设计者经过反复试验,选用了16个车轮为主动轮,各有一套传动系统,成功地解决了转动问题(见图3-12、图3-13)。设计此类机构必须注意各机构的协调配合。在此是利用控制电动机输出转矩的方法,使各台电动机负载均衡。
有些飞机采用2个或4个发动机,不但能够满足所需的推动力要求,而且在飞行时如果有一个发动机故障,不能工作,则靠其余发动机维持飞行,可以避免发生严重事故。
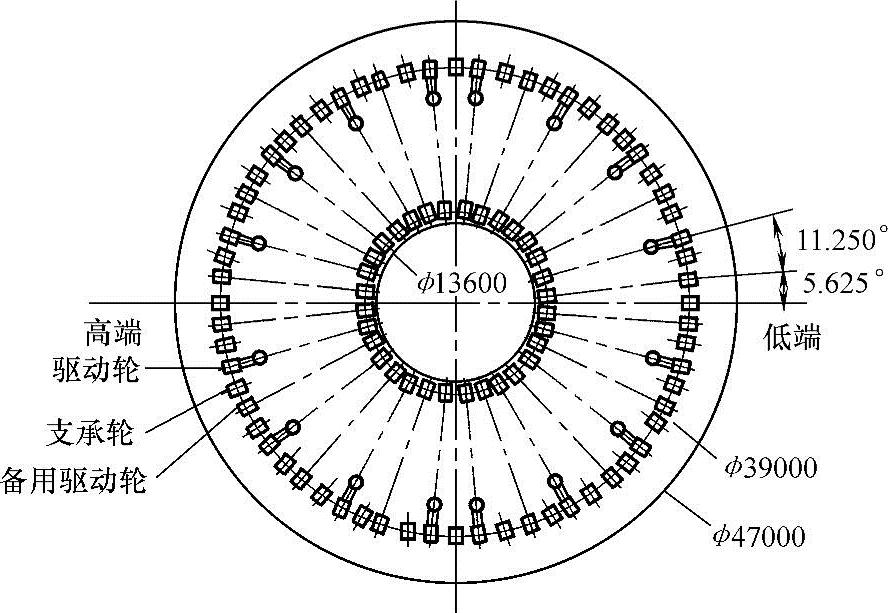
图3-12 中华世纪坛旋转圆坛支撑轮与驱动轮布置图
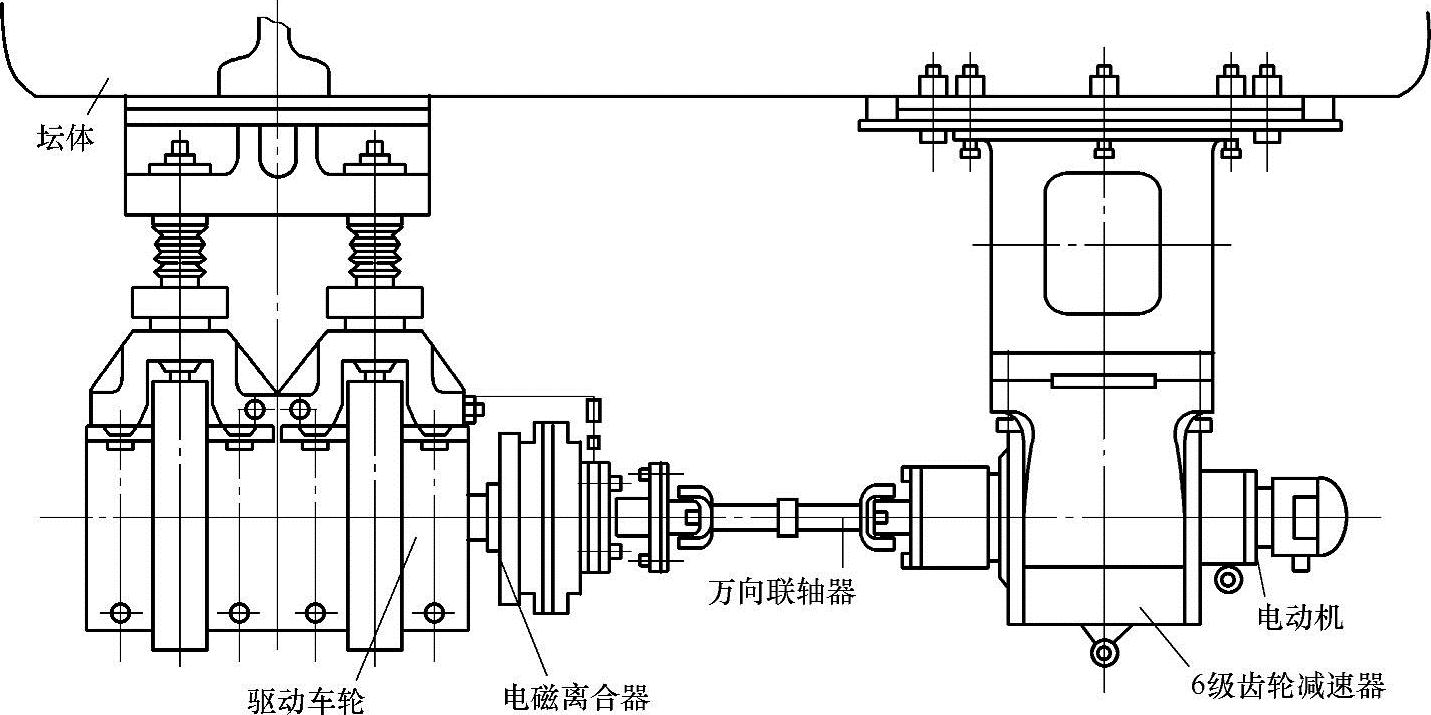
图3-13 传动装置简图
图3-14所示V形发动机中,2个气缸成V形布置,2个活塞通过连杆各推动一个曲柄,该机构可以顺利地通过死点。
图3-15为一种飞机的襟翼操作机构。此机构由两个直移液压缸各推动一个齿条,使齿轮轴心移动,可以使襟翼的摆动速度加快。若其中一套机构发生故障不能运动,则靠另一套机构仍能完成襟翼的动作要求,只是运动速度为原来的1/2。设置冗余机构,增加了机器的可靠性。
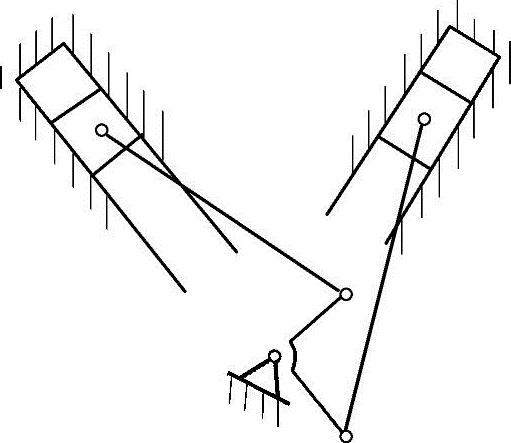
图3-14 V形双缸发动机
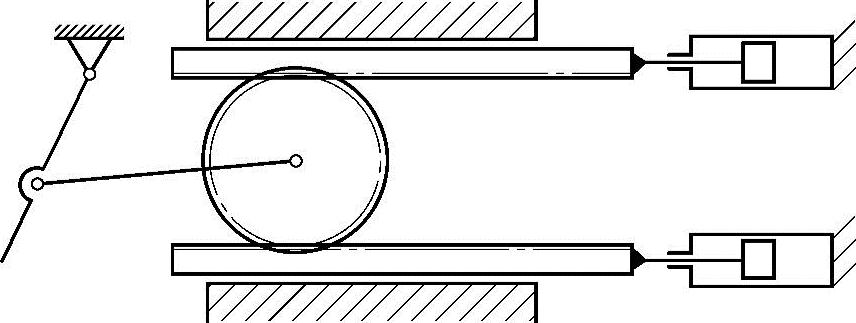
图3-15 襟翼操纵机构
2.Ⅱ型并联
Ⅱ型并联是指将主动件或原动机的运动分为两个(或更多)运动,再将这两个运动合成为一个运动,如图3-11b所示。这种形式可以改善输出构件的运动状态和受力情况,使机构受力自动平衡。设计的主要问题是几个并联机构要协调配合。
图3-16所示的压力机由左右两套机构组合而成。主动件为压力缸1,通过连杆2和2′同时推动两套完全相同的摇杆滑块机构3、4、5和3′、4′、5。当3、4(3′、4′)杆接近死点位置时(3、4接近成一直线时),执行构件5以最大压力对工件进行加工。此机构的优点是可以由较小的气缸推力产生很大的工作压力,同时使横向力自动平衡。应该注意的是,两套机构必须严格同步运动。
图3-17所示的螺旋杠杆机构压力机,采用了左右螺旋机构,两个螺旋螺距相同而旋向相反,在转动螺旋时,压头可以向上或向下运动。这一机构螺母对螺旋的轴向力可以互相平衡,但是压头下压产生的压力会对螺旋产生弯曲应力,另外速度较慢。
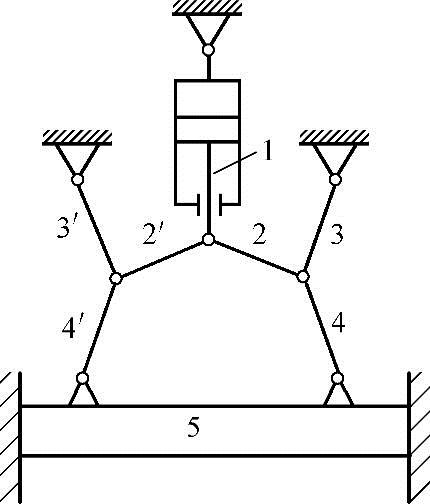
图3-16 分散并联组合机构
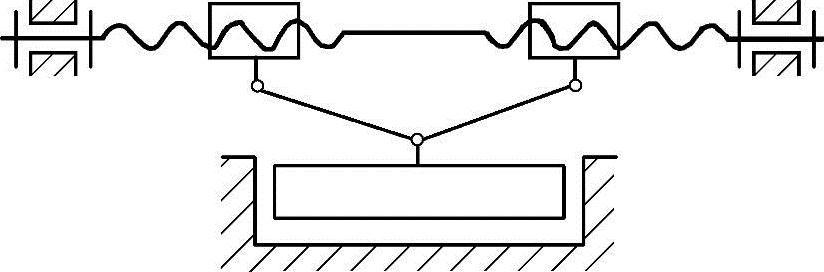
图3-17 压力机的螺旋杠杆机构(https://www.xing528.com)
3.Ⅲ型并联
Ⅲ型并联式组合机构是将一个主动运动分解为两个或多个输出的运动,如图3-18所示。例如,纺织工业使用的细纱机,一个电动机通过传动装置可以带动400~500个纱锭,每一个纱锭以15000r/min左右的转速转动,完成纺织细纱的动作要求。
加工光学透镜的抛光机一般是1个电动机通过4套连杆机构同时加工4个光学透镜,如图3-18a所示。图3-18b所示为双滑块驱动送料机构。做往复摆动的主动件1推动大滑块2和小滑块4。杆1左边端部有一滚子,在大滑块的沟槽中运动,使大滑块左右移动。由于沟槽的作用,使大、小滑块运动规律不同。此机构一般用于工件输送装置。工作时,大滑块在右端位置先接受来自送料机的工件,然后向左移动工件,再由小滑块将工件推出。
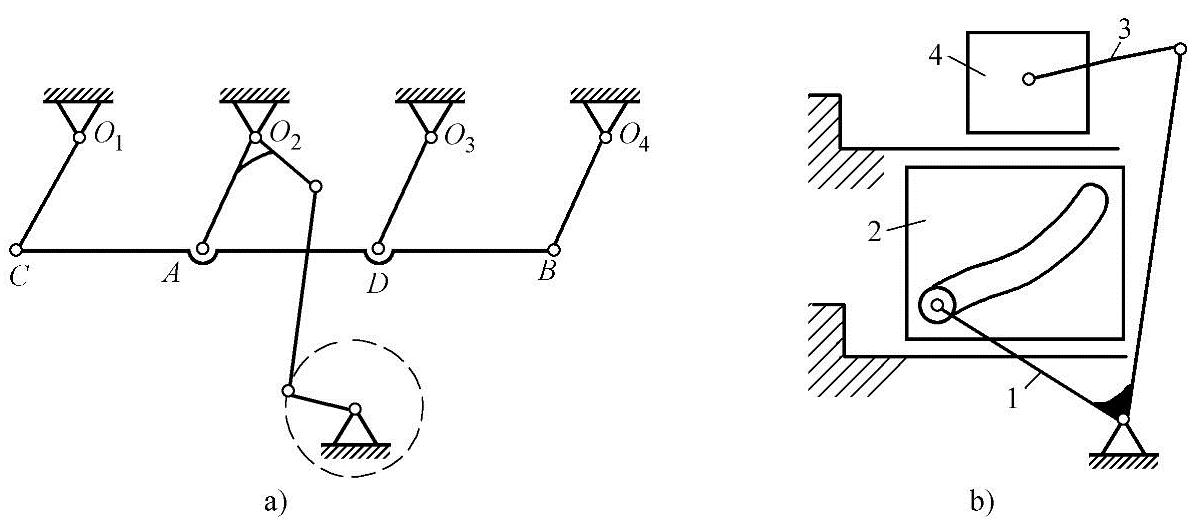
图3-18 Ⅲ型并联举例
a)光学零件抛光机床 b)送料机构
1—主动件 2—大滑块 3—连杆 4—小滑块
在机械中广泛使用并联机构。几套机构之间的同步和配合往往起重要的作用,也是设计者必须注意的问题。图3-19所示为工业生产中广泛使用的桥式起重机,其跨度L可达30m以上。因此其两端的车轮必须同步滚动,否则起重机前进时将出现不稳定。
图3-20所示为几种常用桥式起重机大车集中驱动布置图。其中,图a为低速轴集中驱动,传动装置重量大,给起重机增加较大的负担;图b为高速轴集中驱动,重量轻,但是传动轴转速高,安装要求高;图c为中速轴集中驱动,机构复杂,使用少。图3-21所示为两套独立的无机械联系的机构,省去了中间传动轴,自重轻,分组性好,安装和维修方便,当桥架有足够的水平刚度,其轮距B与跨度L之比B/L=1/4~1/6时,两侧电动机的输出力矩能够互相调节,再加上电气控制技术采取适当措施,可以达到运行平稳。图3-19中采用的就是分别驱动。
有些机器需要几套机构之间的运动互相配合,完成复杂的工艺动作要求。例如,家用脚踏缝纫机的针、梭心、送布牙之间密切配合,可以实现缝纫的功能。
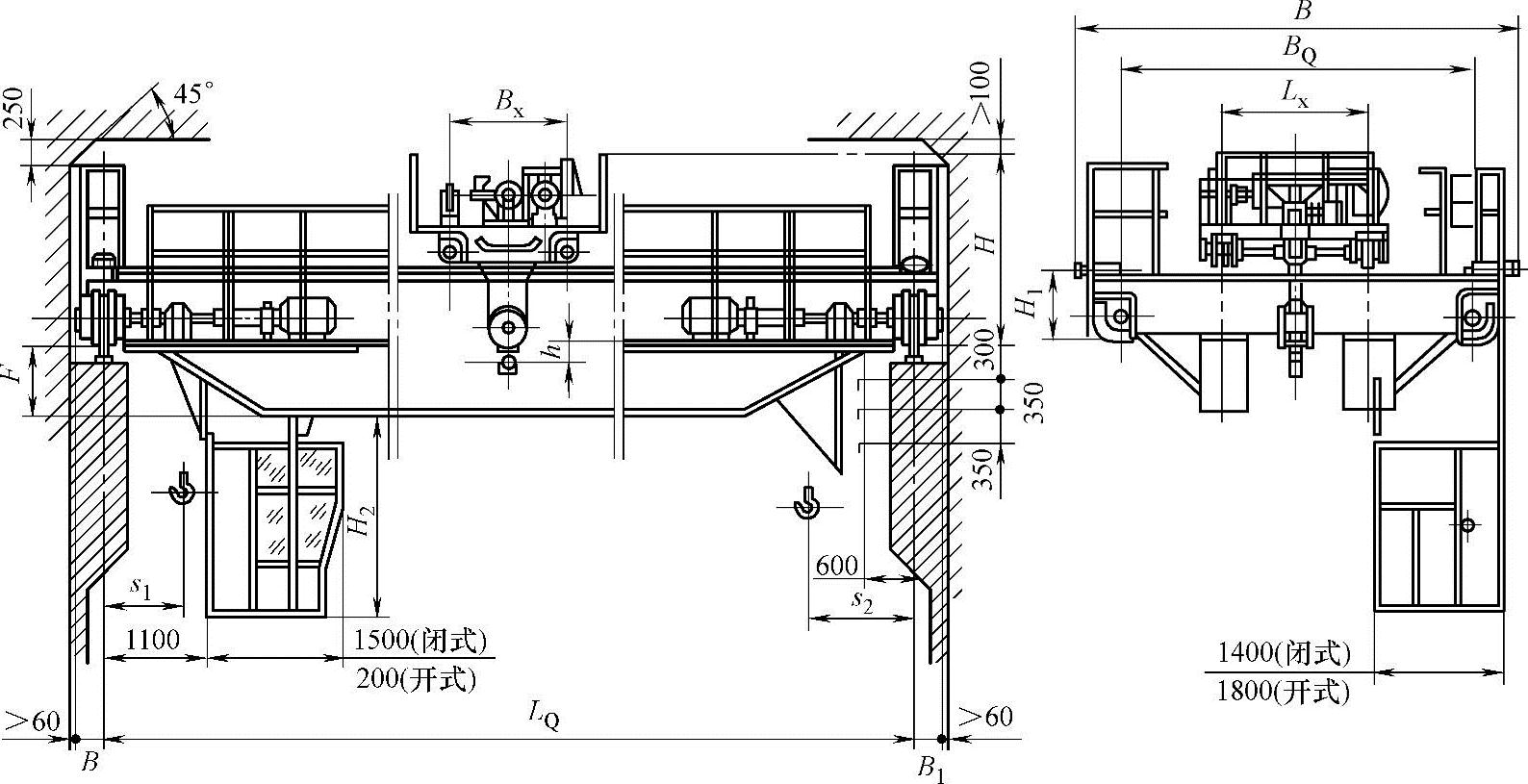
图3-19 桥式起重机
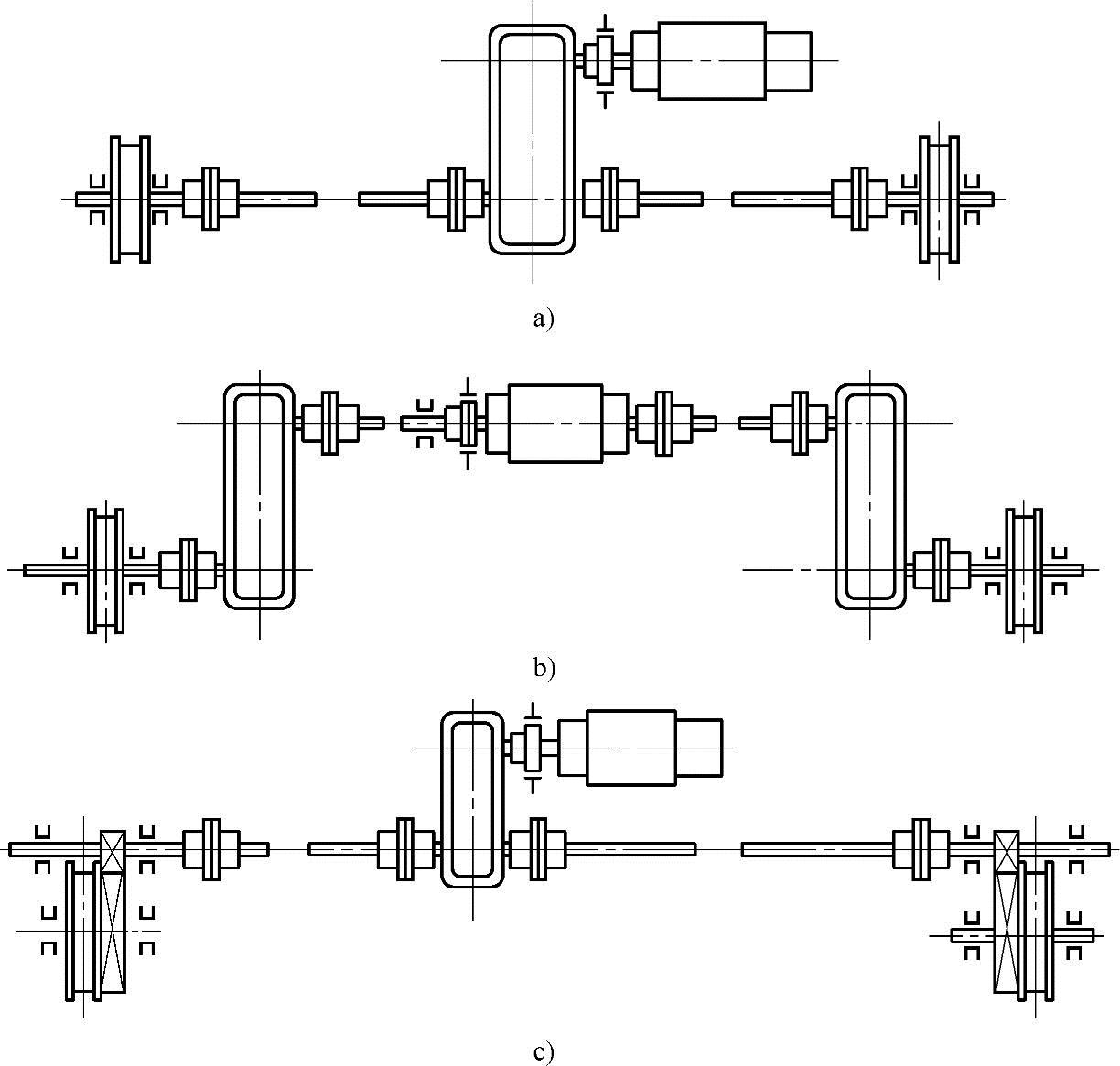
图3-20 集中驱动布置图
a)低速轴集中驱动 b)高速轴集中驱动 c)中速轴集中驱动
图3-21a所示为电影放映机的输片机构。凸轮轴为主动轴,当三角凸轮转动时,从动件沿导路上下移动,由于凸轮的圆弧EF和CD都是以O为中心的圆弧(见图3-21b),所以当这两段圆弧与框架接触时,从动件将不动(当圆弧CD与框架上边缘接触时,从动件处于最低位置;当圆弧EF与框架上边缘接触时,从动件处于最高位置),即三角凸轮每转动1周,从动件有两次停歇。另一个圆盘凸轮(图中称为歪盘)是一个局部凸起的薄圆盘,它插入框架的一个沟槽中,设计要求此盘的凸起部分,正好在框架停止运动时,使抓片齿从胶片侧面齿孔中进入或脱出,二者的运动配合如图3-21a所示。
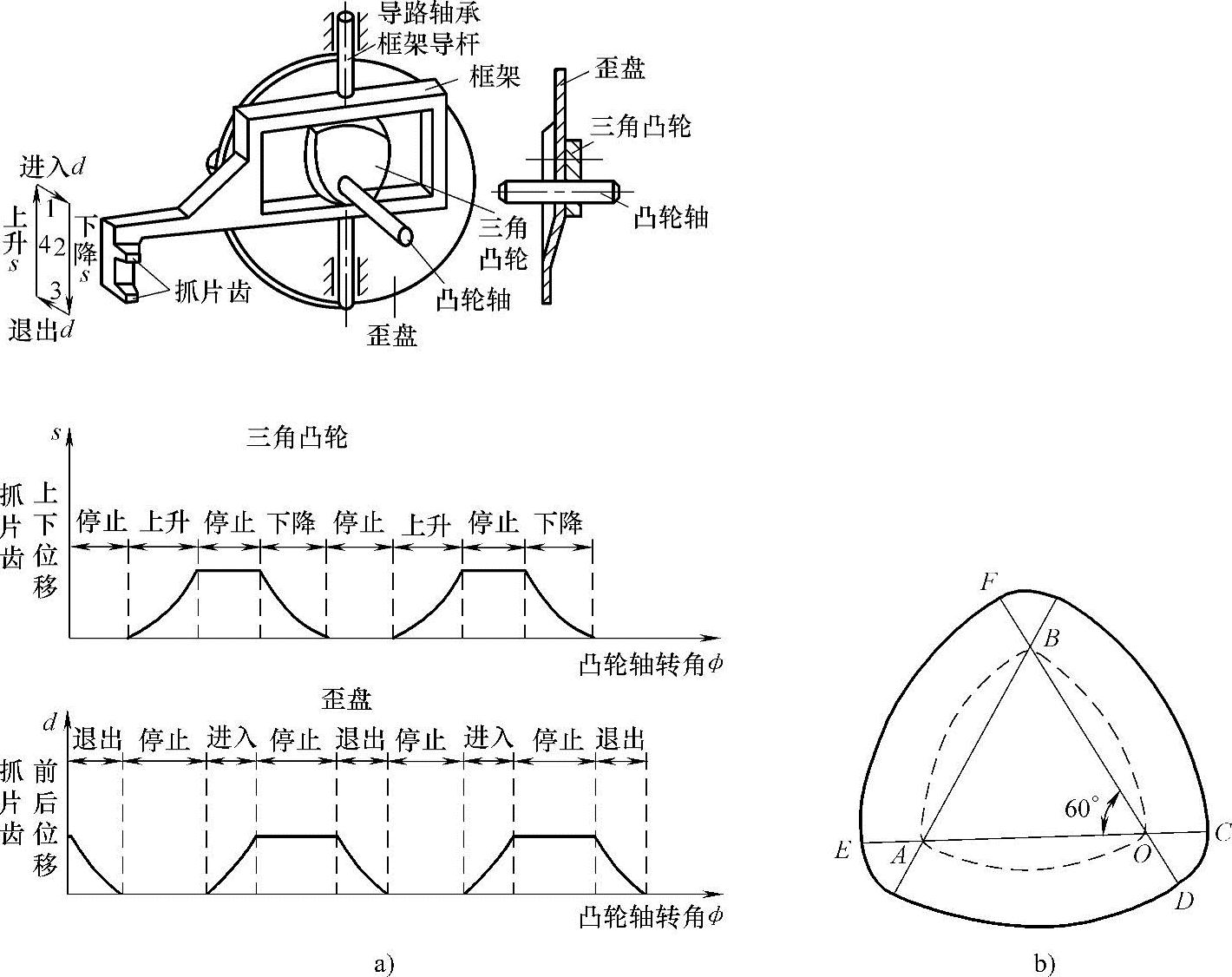
图3-21 电影机放映机输片机构结构简图
a)电影机抓片机构及凸轮运动配合 b)电影机凸轮主要尺寸关系
目前并联机构是机构设计研究的热点问题之一。图3-22所示为用于航天飞船对接器的对接机构和对接模拟器的并联机器人。它是一个六自由度的并联机器人,可以完成主动抓取、对正、拉紧柔性连接以及锁住、卡紧等一系列工作。此外,还有吸收能量和减振的作用,可以保证对接任务的顺利进行。
图3-22是一种由并联机构组成的并联机器人,可以用于大型雷达或射电望远镜等设备,也可以作为并联机床,具有刚度质量比大、移动速度快、易于实现模块化设计和制造成本低等特点。而纯六自由度并联机床位置解析困难,姿态能力差,控制复杂,目前有向少自由度或串并联混合发展的趋势。
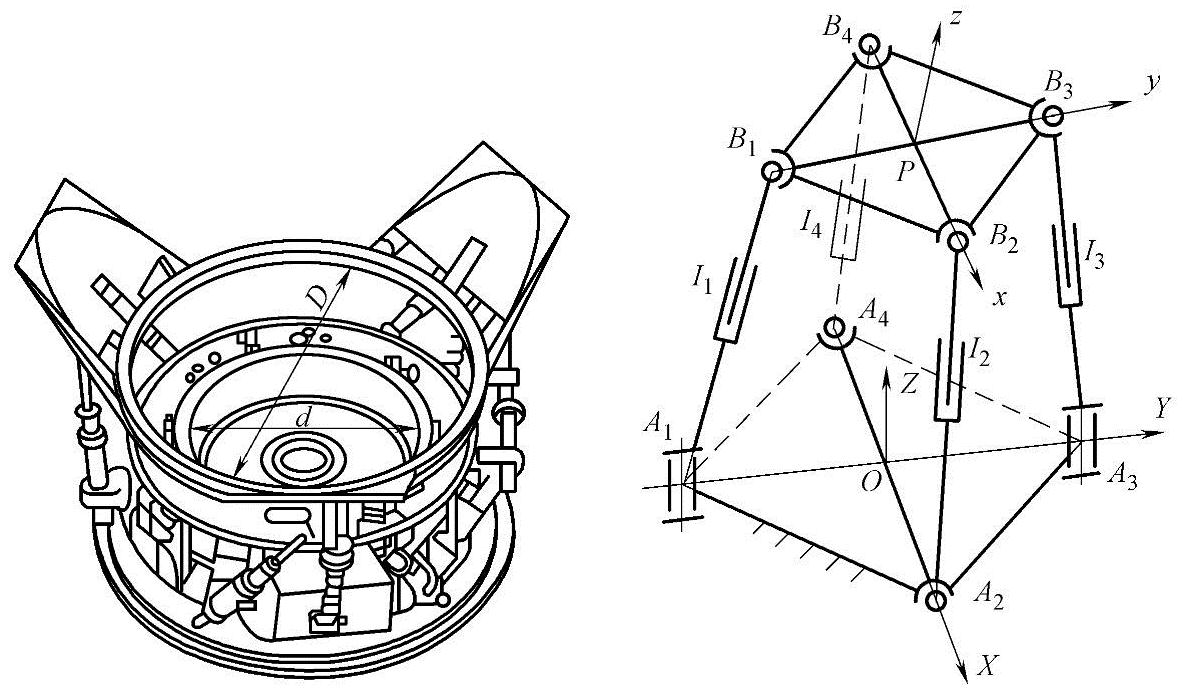
图3-22 航天飞船对接器并联机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。