



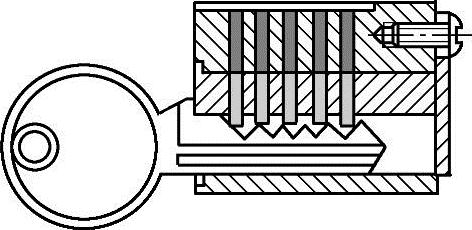
图3-2 简单动作功能典型实例(2)——弹子锁
机械的基本功能是实现确定形式的相对运动,因此需要研究零件之间的相对运动关系。如图3-3a所示,一个不受约束的机械零件在空间有6个自由度,即沿X、Y、Z3个轴的移动和绕这3个轴的转动。这6个自由度可以用图3-3b表示。3根空心坐标轴表示移动方向,未涂黑表示可以沿该方向移动,一半涂黑表示沿该方向可以向一侧移动,另外一侧则不能移动。坐标轴端部的圆圈表示是否可以绕该坐标轴转动,也用是否涂黑表示。两个零件之间常见的连接形式及其对自由度的约束见表3-1。
单动作功能具有广泛的用途和宽广的创造空间。简单动作功能通常通过两个零件之间接触面形状的巧妙组合实现,求解简单动作功能时针对所要实现的动作功能(运动规律、运动轨迹),对零件的几何形体进行构思。
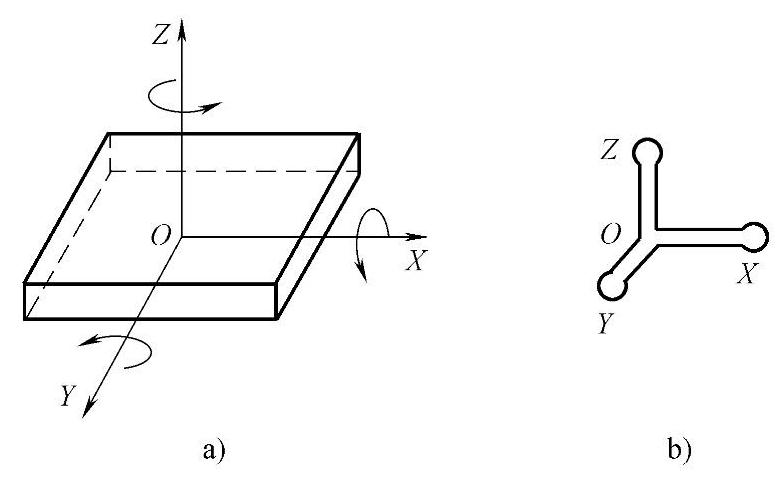
图3-3 机械零件的自由度
a)零件的自由度 b)自由度表示方法
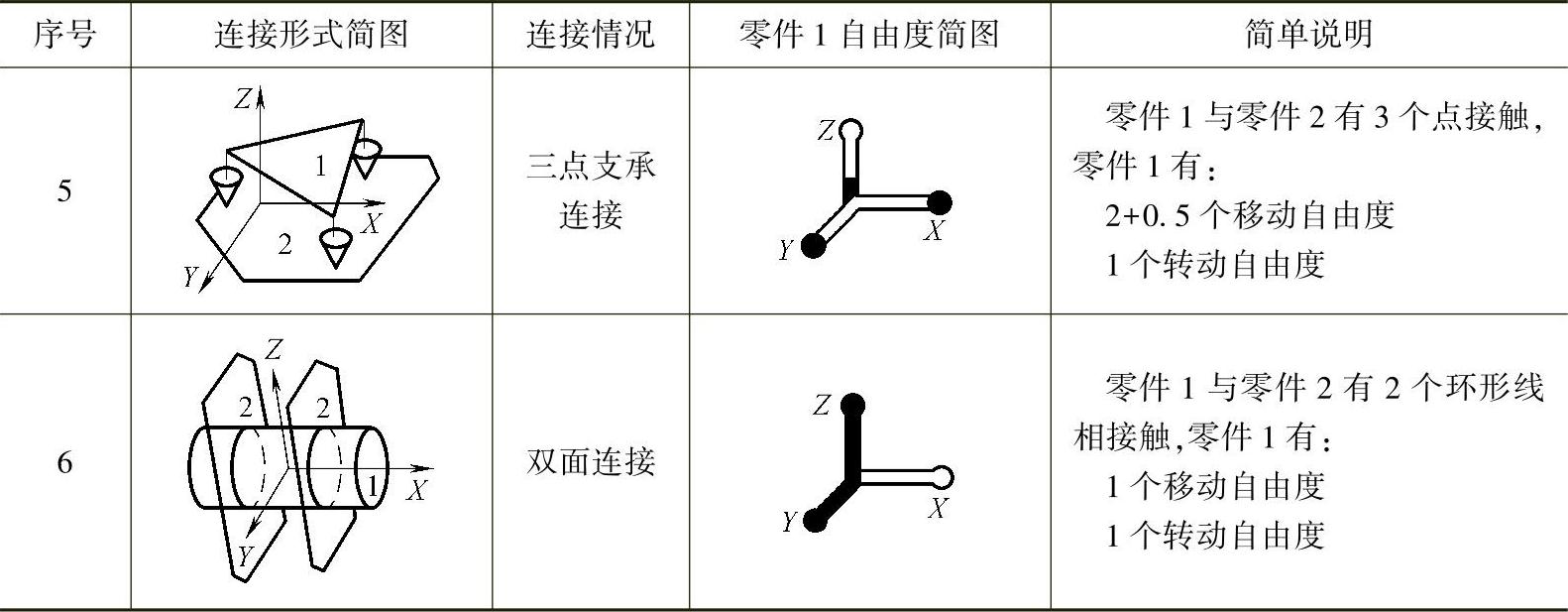
表3-1 两个零件的连接形式和相对运动自由度

(续)
通过对已有的简单动作功能优秀设计实例的分析,可以学到很多巧妙的设计方法。(https://www.xing528.com)
下面介绍几个利用零件自由度分析方法,分析和设计简单动作功能机构的实例。
图3-4a中,两个轴承支承着轴A,由于支撑的限制,此轴只有一个绕X轴旋转的自由度,沿X轴只能向右移动,其自由度如图3-4b所示。如果再增加一个轴肩,即可限制向右移动的可能性(见图3-5)。图3-5所示为滑动轴承支撑的轴系结构。图3-5a是一端固定一端游动的轴系结构,图3-5b是两端单项固定的轴系结构。
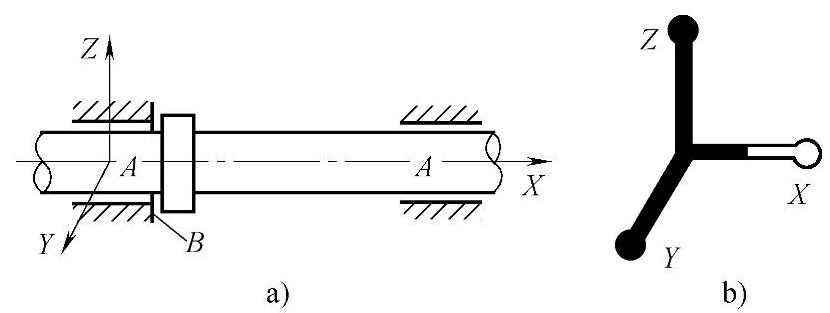
图3-4 轴的自由度分析(1)
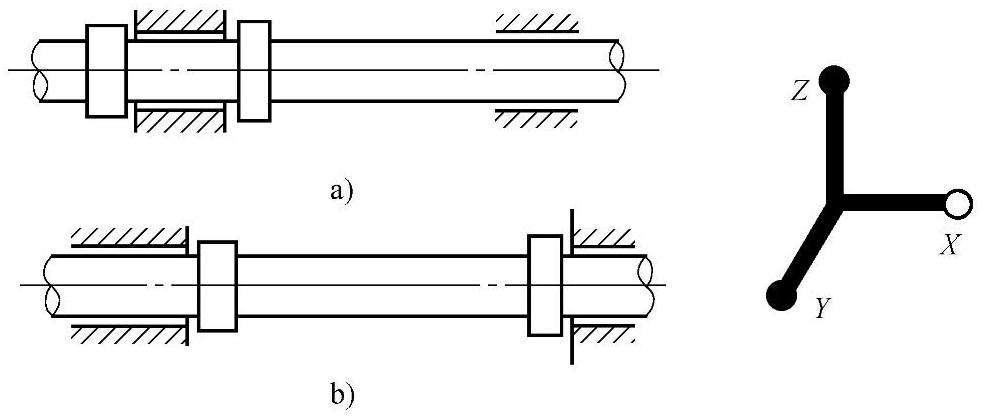
图3-5 轴的自由度分析(2)
图3-6a所示为导轨的运动学原理,其中,接触点1、3、5所构成的连接相当于表3-1的第5种连接形式,接触点2、4所构成的连接相当于第4种连接形式。因此工作台只具有沿Y轴方向移动的自由度,沿Z轴方向向上移动的自由度可以利用辅助的固定装置或工作台的自重使工作台不会向上运动。图3-6b为导轨的结构图,接触点5用一个平面代替,增大了承载能力,同时也提出了1、3和5两个平面必须具有良好的平面度的要求。图3-6c为导轨的自由度简图,表明工作台可以沿Y方向做双向运动,沿Z方向做单向运动(向上)。
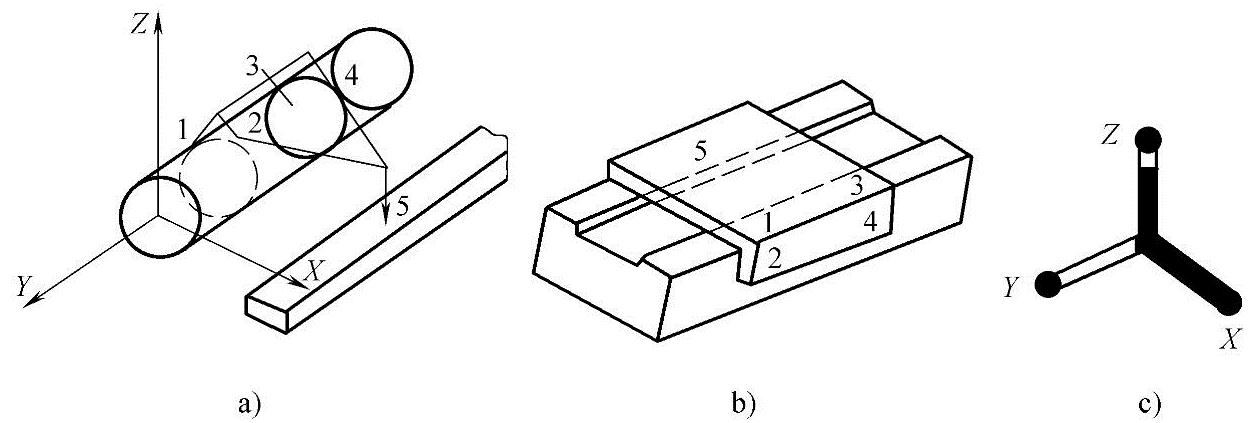
图3-6 导轨支承的自由度
a)工作原理 b)实物结构 c)自由度简图
1~5—接触点
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。