



【摘要】:现以永磁同步电动机AC伺服系统为例,描述其数学模型和结构框图。图6-88 AC伺服驱动系统的电路结构设转子永久磁铁的磁场在空间为正弦分布,电动机定子为三相绕组,电动机转角为θ,则电动机的三相电流可表示为式中 Bm——磁通密度的最大值;Im——电流最大值;l——转子铁心长度;r——转子半径。先定义AC永磁伺服电动机的dq坐标系统。图6-89 AC伺服系统动态结构框图
现以永磁同步电动机AC伺服系统为例,描述其数学模型和结构框图。如图6-88所示,AC伺服驱动系统由永磁同步电动机SM、位置和速度检测器、电流传感器、晶体管SPWM逆变器及控制电路ASR、ACR等组成。
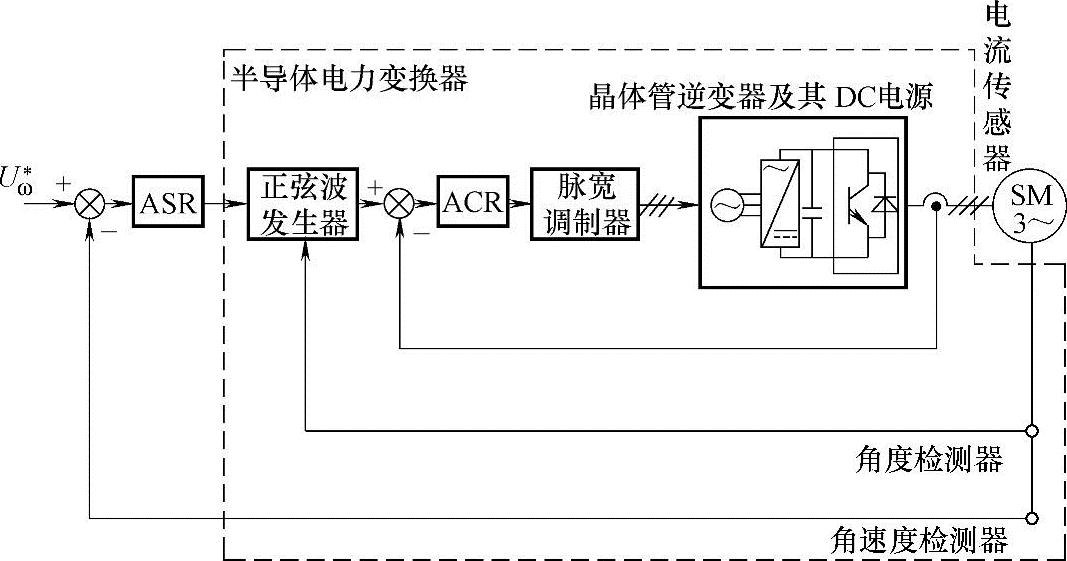
图6-88 AC伺服驱动系统的电路结构
设转子永久磁铁的磁场在空间为正弦分布,电动机定子为三相绕组,电动机转角为θ,则电动机的三相电流可表示为
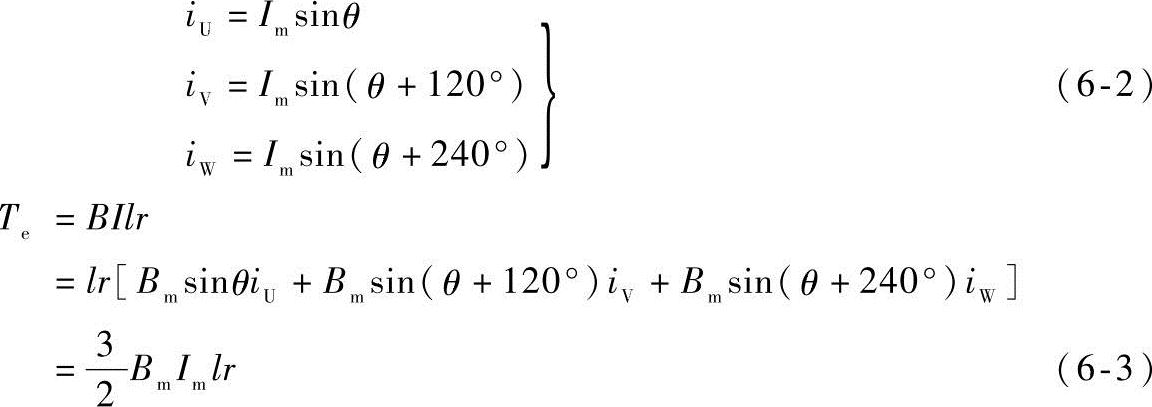
式中 Bm——磁通密度的最大值;
Im——电流最大值;
l——转子铁心长度;
r——转子半径。(https://www.xing528.com)
由以上可看出,只要检测出转子位量角θ,对三相电流按式(6-2)进行控制,并实现电流与磁通正交,则当Bm恒定的条件下,只要控制Im,即可使Te的大小得到控制。
先定义AC永磁伺服电动机的dq坐标系统。设永久磁铁基波磁势方向为d轴,则转矩方向为q轴,并垂直于d轴,转子参考坐标的旋转速度即为转子速度ω,则可写出电动机在dq坐标系的电压矩阵表示式为

式中 Rs——定子电阻;
La——定子电感,La=Ld=Lq。
可画出以Im(s)为输入、ω(s)为输出的AC伺服系统控制框图,如图6-89所示。图中,Ku、Kj分别为电动机电势与转矩系数,Kpi(s)和Kj(s)分别为电流调节器和电流反馈回路的传递函数。
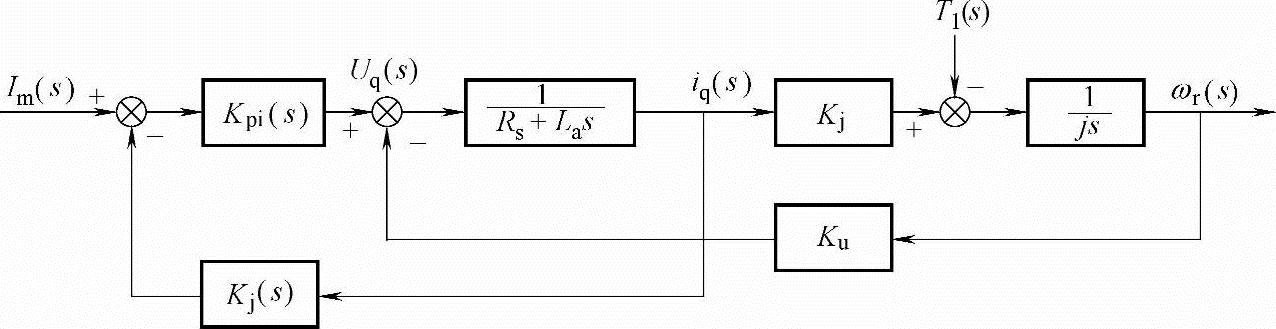
图6-89 AC伺服系统动态结构框图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。