



1.交流伺服系统的构成
现以永磁同步电动机AC伺服系统为例进行识读,该系统由下面几部分组成:
(1)永磁同步伺服电动机 永磁同步伺服电动机由转子和定子两大部分组成,如图6-71所示。在转子上装有特殊形状的永久磁铁用以产生恒定磁场。永磁材料可以采用铁氧体或钕铁硼。由于转子上没有励磁绕组,故不会发热。电动机内部的发热只取决于定子绕组流过的电流。电动机定子铁心上绕有三相电枢绕组接于变频电源上。从结构上看,永磁同步伺服电动机的定子铁心直接暴露于外界环境中,创造了良好的散热条件,也容易使电动机实现小型和轻量化。一般AC伺服的外壳设计成多个翅片,以退化散热。
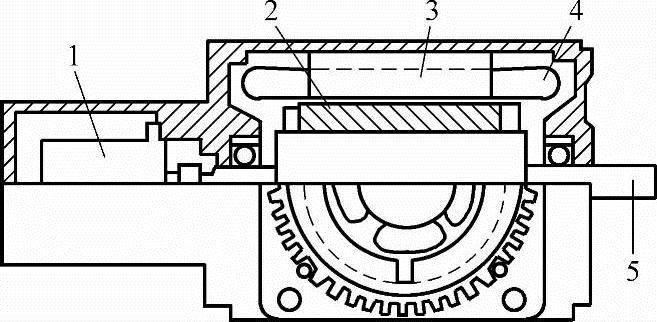
图6-71 永磁同步伺服电动机的结构
1—检测器(旋转变压器) 2—永久磁铁 3—铁心 4—三相绕组 5—输出轴
(2)速度和位置传感器 为检测电动机的实际运行速度,通常在电动机轴的非负载端安装速度传感器,如测速发电机等。为了进行位置控制,同时也装有位置传感器,如光电编码器。对于永磁同步伺服电动机来说,还必须装有转子永久磁铁磁极位置的检测器,实现定子电流的正弦化控制。实际上,测速、测位置、磁极定位这三种检测功能均可用一个光电编码器或旋转变压器来完成。
(3)逆变器和PWM生成 图6-72为AC伺服系统的结构图。图中U1为逆变器实际电路。由二极管整流器和IGBT逆变器两部分组成。该逆变器在PWM信号的驱动下,输出电压与频率均可调的交流电,送到伺服电动机SM的定子绕组中。(https://www.xing528.com)
(4)速度控制器和电流控制器 图6-72所示速度控制器ASR按PI控制规律动作,它的输出为电流指令。ASR的作用是为了稳定速度,使之在定位时不产生振荡;同时要求速度环能有高速响应的能力,对扰动有良好的抑制作用。
电流控制器ACR是作为速度环的内环,它综合了电流指令信号和反馈信号,也按PI控制规律工作。其功能是使电枢绕组中的电流在幅值和相位上都得到有效控制。要求ACR能有更高的快速性,以适应电流瞬时值跟踪PWM控制的要求。
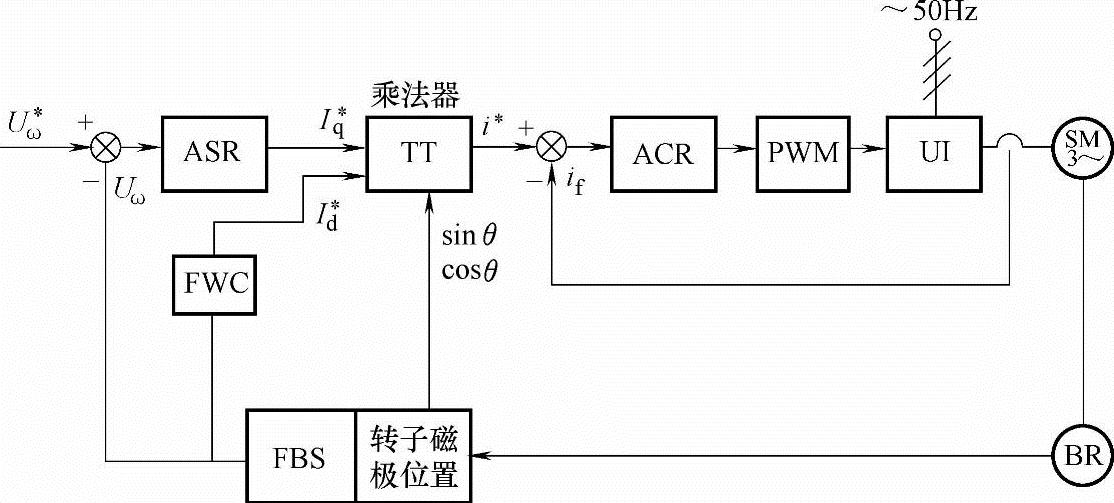
图6-72 AC伺服系统的结构图
2.AC伺服系统工作原理剖析
如图6-72所示,输入端的速度指令U*ω和速度反馈信号Uω比较后,输出电流指令信号I*q,这是一个表征电流幅值的直流量。但控制的是交流电动机,故其定子中应流过交流电流。这样就必须在控制信号中反映出电流的大小(幅值)和相位两种因素。因此,应增设电流相位的信号,该信号应由转子磁极位置,经FWC解调环节得到I*d,而电流指令的频率则由转子速度来决定,并要求电流矢量的方向与磁极磁通的方向正交。这样就可达到像直流电动机电枢电流方向与磁通方向正交那样进行力矩控制。为此,将位置检测器输出的信号和电流指令值相乘,在乘法器的输出端即可获得交流电流指令i*。把电流指令信号i*与电流反馈信号if相比较后,将差值送入电流控制器ACR。这样,经过电流瞬时跟踪环节就可使电动机定子绕组中产生的电流波形与电流指令i*很相似,但幅值要高得多的正弦电流,该电流在永久磁铁转子的作用下产生电磁转矩。即定子电枢线圈的导体虽受力,但导体是固定在定子上的,故只能以反作用力的方式推动永久磁铁转子使电动机运行起来。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。