



T610型卧式镗床的电气控制电路图和液压系统均较为复杂。它主要包括机床中的主轴旋转、平旋盘旋转、工作台转动、尾架升降用电动机拖动;主轴和平旋盘刀架进给、主轴箱进给、工作台的纵向及横向进给、各部件的夹紧采用液压传动控制等。
T610型卧式镗床电气控制线路原理如图4-13所示。
从图4-13a可知,T610型卧式镗床由主轴电动机M1、液压泵电动机M2、润滑泵电动机M3、工作台电动机M4、尾架电动机M5、钢球无级变速电动机M6、冷却泵电动机M7拖动。
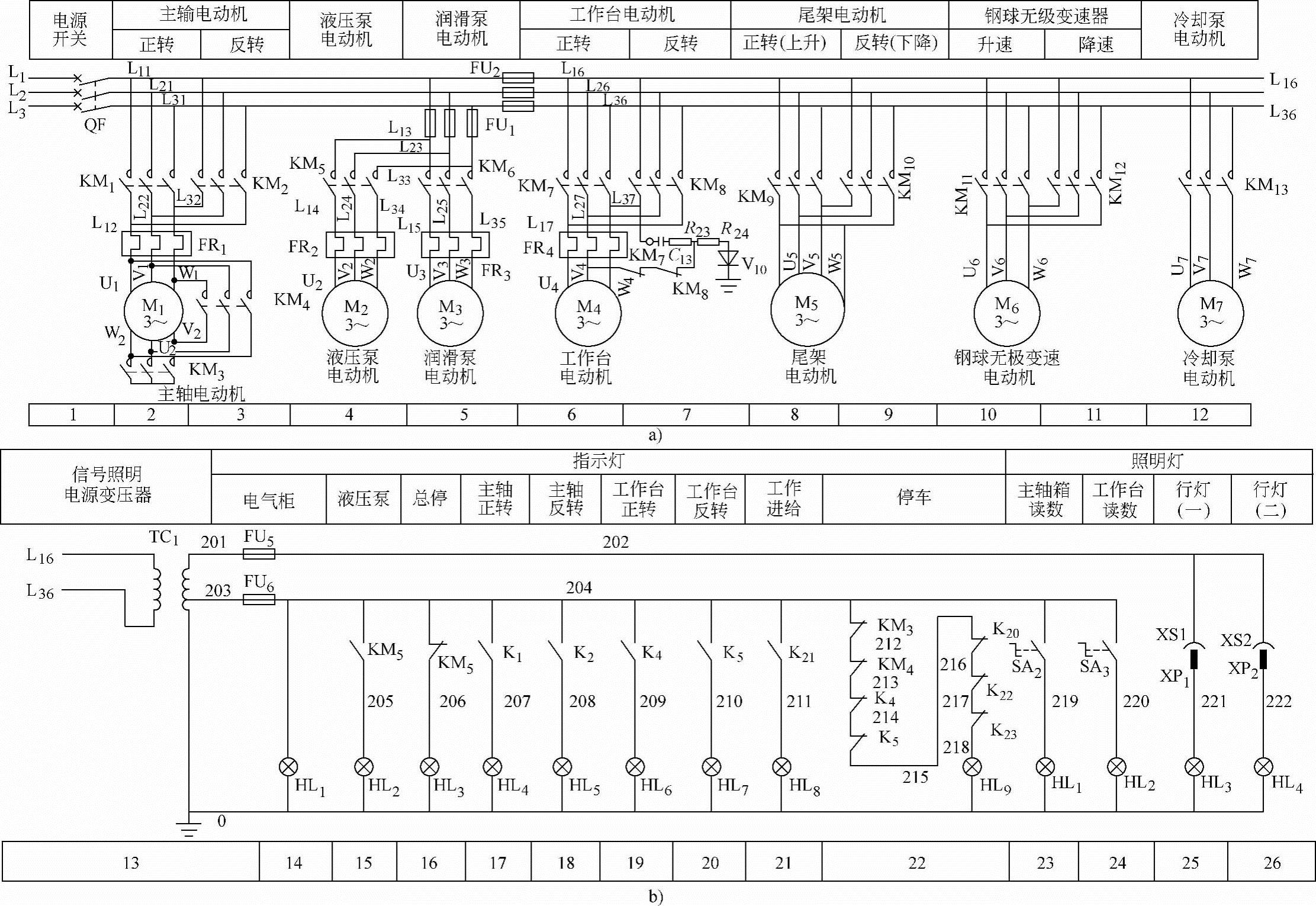
图4-13 T610型卧式镗床电气控制电路原理

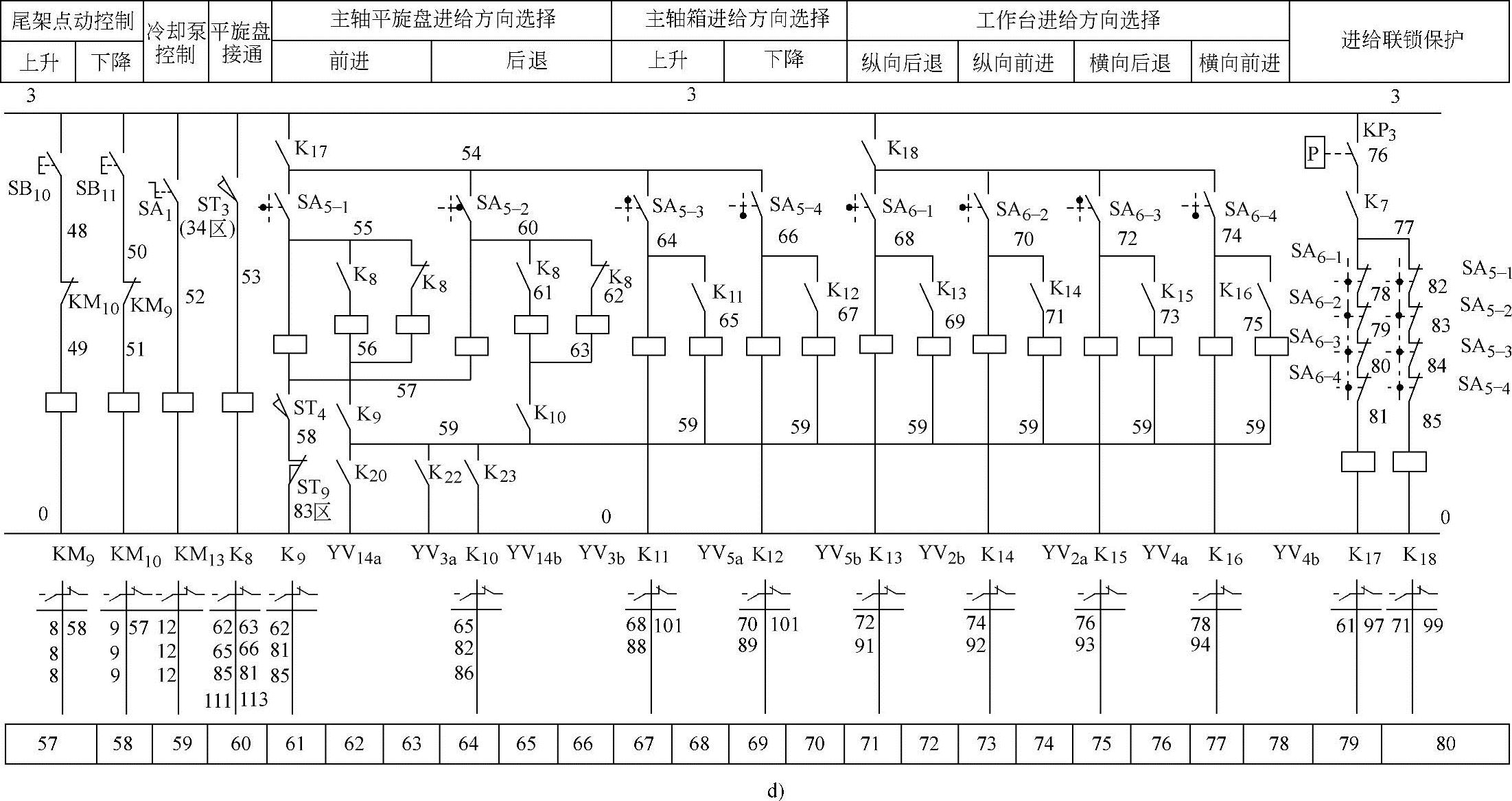
图4-13 T610型卧式镗床电气控制电路原理(续)
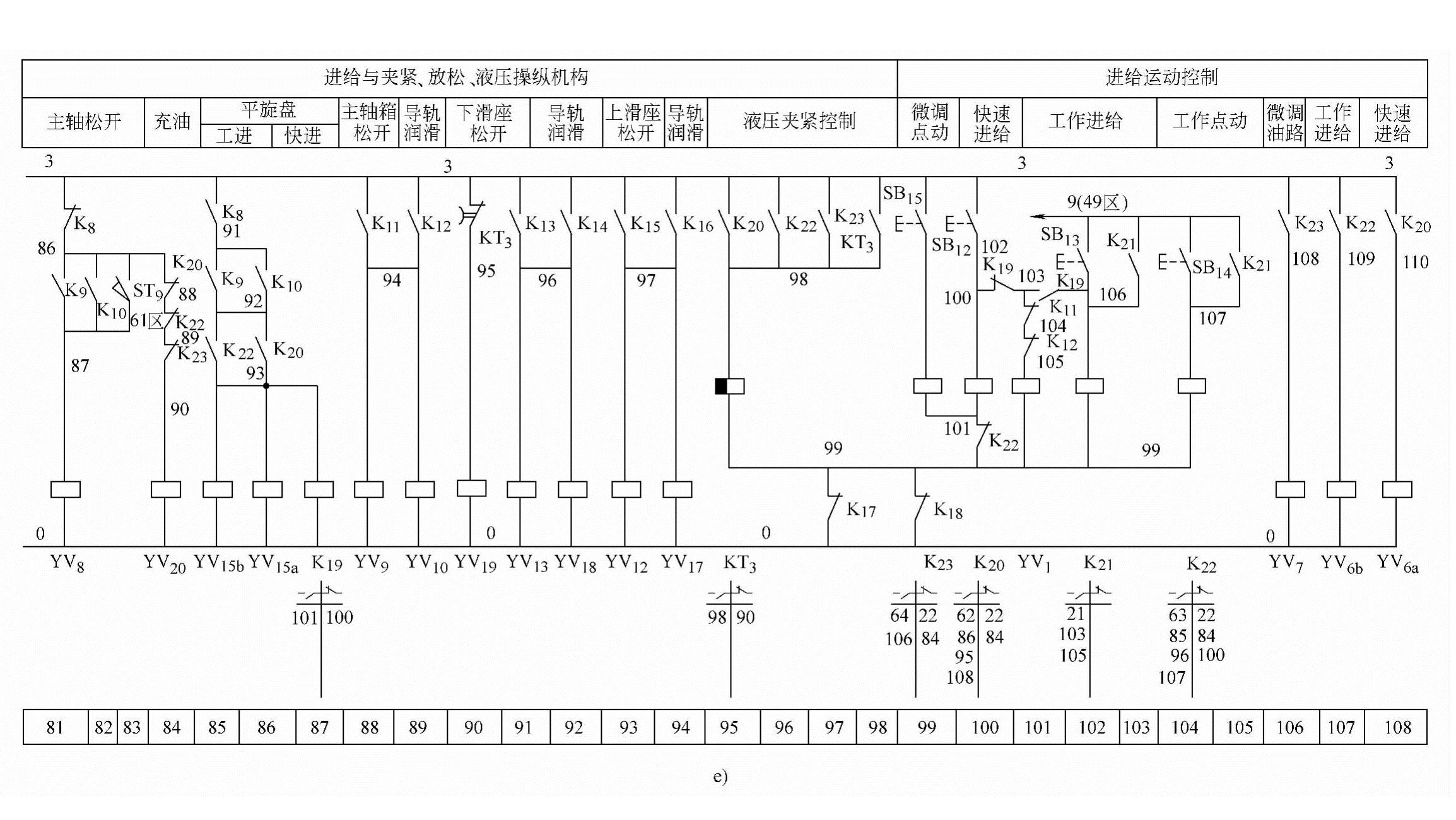
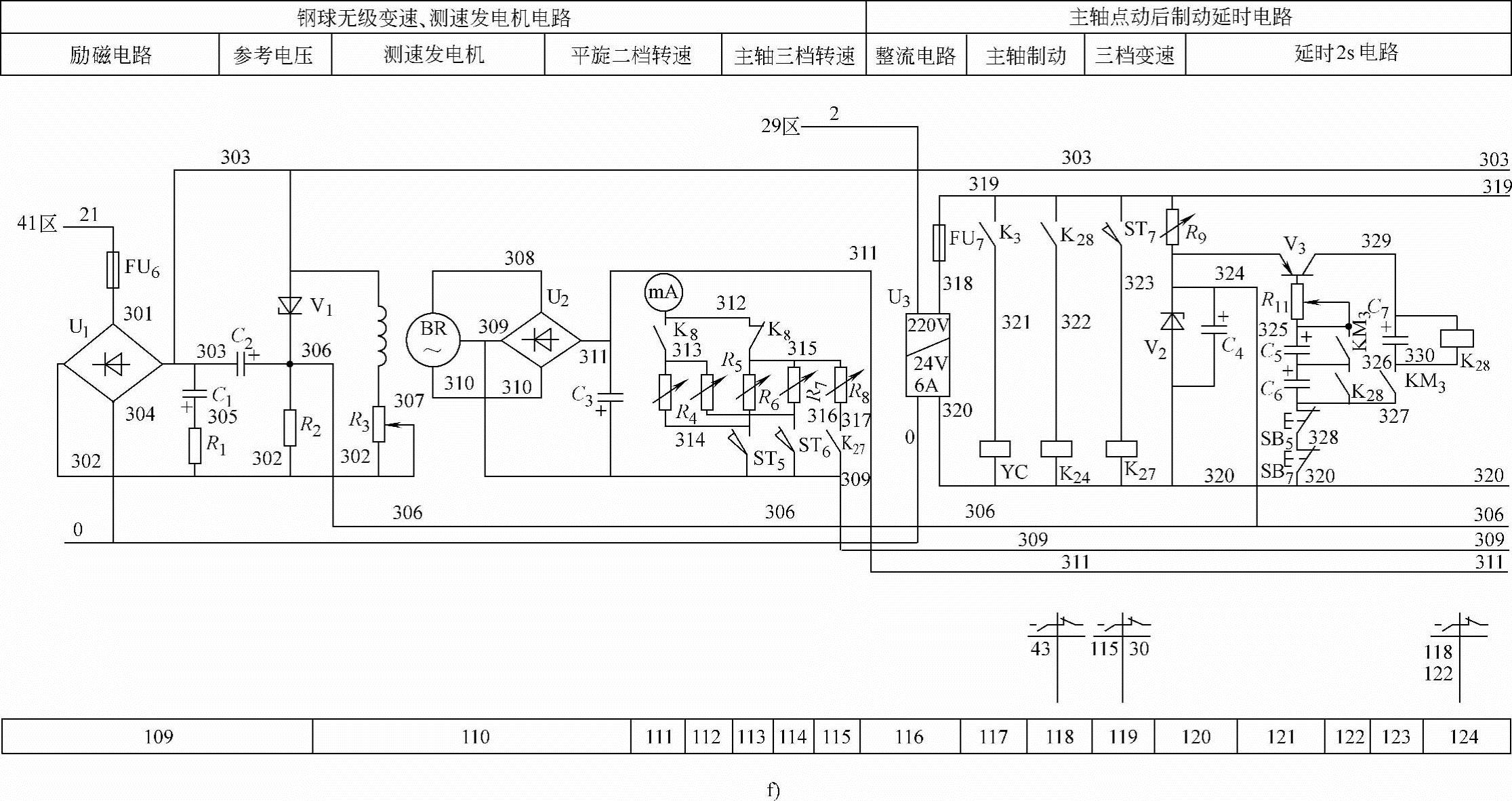
图4-13 T610型卧式镗床电气控制电路原理(续)
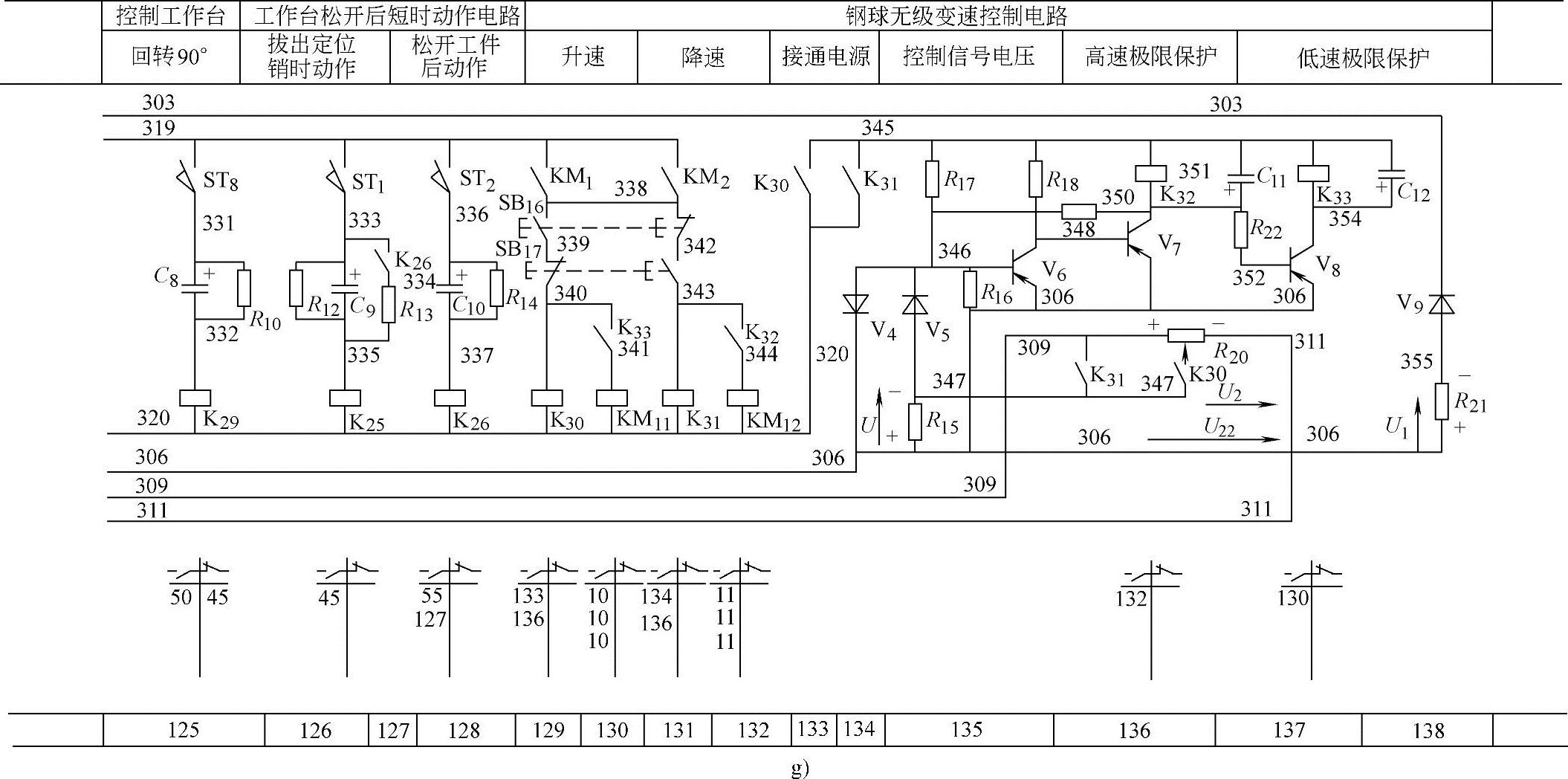
图4-13 T610型卧式镗床电气控制电路原理(续)
图4-13所示为机床各种工作状态的指示灯及机床照明灯电路控制原理。
1.液压泵电动机M2、润滑泵电动机M3的控制
T610型卧式镗床在对工件进行加工前必须先启动液压泵电动机M2和润滑泵电动机M3。在图4-13第28区中,按下按钮SB1,接触器KM5、KM6线圈通电吸合并自锁,液压泵电动机M2、润滑泵电动机M3启动运转;按下按钮SB2,接触器KM5、KM6失电释放,液压泵电动机M2、润滑泵电动机M3停止运转。
2.机床启动准备控制电路
液压泵电动机M2、润滑泵电动机M3启动运转后,当机床中的液压油具有一定压力时,压力继电器KP2动作,第52区中KP2常开触点闭合,KP2的常闭触点断开,为主轴电动机M1的正转点动和反转点动做好了准备。当压力继电器KP3动作时,接通中间继电器K17和K18线圈的电源,为主轴平旋盘进给、主轴箱进给及工作台进给做准备。
3.主轴电动机M1的控制
主轴电动机M1可进行正、反转 -△减压启动控制,也可进行正、反转点动控制和停止制动控制。
-△减压启动控制,也可进行正、反转点动控制和停止制动控制。
(1)主轴电动机M1正、反转 -△减压启动控制 按下30区中的按钮SB4,中间继电器K1线圈通电吸合并自锁,中间继电器K1线圈通电吸合,中间继电器K1在17区中204号线与207号线间的常开触点、31区中9号线与10号线间的常开触点、35区中9号线与15号线间的常开触点、38区中21号线与22号线间的常开触点闭合。继而接通信号指示灯HL4的电源,HL4发亮,表示主轴电动机M1正在正向旋转,并为接通时间继电器KT1线圈电源做好了准备。中间继电器K1的闭合,也接通了接触器KM1线圈的电源,接触器KM1通电吸合。
-△减压启动控制 按下30区中的按钮SB4,中间继电器K1线圈通电吸合并自锁,中间继电器K1线圈通电吸合,中间继电器K1在17区中204号线与207号线间的常开触点、31区中9号线与10号线间的常开触点、35区中9号线与15号线间的常开触点、38区中21号线与22号线间的常开触点闭合。继而接通信号指示灯HL4的电源,HL4发亮,表示主轴电动机M1正在正向旋转,并为接通时间继电器KT1线圈电源做好了准备。中间继电器K1的闭合,也接通了接触器KM1线圈的电源,接触器KM1通电吸合。
接触器KM1闭合,切断接触器KM2线圈的电源通路及中间继电器K3线圈的电源通路,接通主轴电动机M1的正转电源,为主轴钢球无级变速做好准备;继而38区中的时间继电器KT1线圈和40区中的接触器KM3线圈通电吸合,主轴电动机M1绕组接成 接法正向减压启动。
接法正向减压启动。
经过一定的时间,时间继电器KT1动作,切断接触器KM3线圈的电源,接触器KM3失电释放;继而接通接触器KM4线圈的电源,接触器KM4通电闭合,主轴电动机M1的绕组接成△接法正向全压运行。
当需要主轴电动机M1制动停止时,按下主轴电动机M1的制动停止按钮SB3,中间继电器K1线圈、接触器KM1线圈失电释放,继而接触器KM4失电释放。中间继电器K1、接触器KM1、接触器KM4的所有常开、常闭触点复位,主轴电动机M1断电。但由于惯性的作用,主轴继续旋转。然后按钮SB3在42区中3号线与27号线间的常开触点闭合,中间继电器K3通电吸合,接通主轴制动电磁铁YC的电源,对主轴进行抱闸制动。松开按钮SB3中间继电器K3,主轴制动电磁铁YC失电,完成主轴的停车制动过程。
主轴电动机M1的反向 -△减压启动过程与正向
-△减压启动过程与正向 -△减压启动过程完全相同,请读者自行完成其减压启动过程的分析。
-△减压启动过程完全相同,请读者自行完成其减压启动过程的分析。
(2)主轴电动机M1点动启动、制动停止控制当需要主轴电动机M1正转点动时,按下主轴电动机M1的正转点动按钮SB5,接触器KM1线圈通电闭合(此时液压泵电动机M2和润滑泵电动机M3启动后中间继电器K7已闭合),继而接触器KM3线圈通电闭合,接触器KM3闭合。主轴电动机M1的绕组接成 接法减压启动运转。
接法减压启动运转。
接触器KM3闭合的同时,接触器KM3在122区及123区中325号线与326号线间的常开触点及326号与327号线间的常开触点闭合短接电容器C5和C6,消除电容器C5、C6上的残余电量,为主轴电动机M1点动停止制动作准备。
松开主轴电动机M1的正转点动按钮SB5,接触器KM1和接触器KM3断电释放,其常开常闭触点复位,主轴电动机M1断电,但在惯性的作用下主轴继续旋转。此时按钮SB5的常闭触点也复位闭合,通过晶体管电路控制,使中间继电器K28通电闭合,继而中间继电器K24线圈通电闭合,中间继电器K3线圈通电闭合,并切断时间继电器KT1线圈、接触器KM3线圈、接触器KM4线圈的电源通路。
中间继电器K3闭合,接通主轴电动机M1的制动电磁铁YC的电源,制动电磁铁YC动作,对主轴进行制动,使主轴电动机M1迅速停车。
主轴电动机M1点动反转启动、停止制动控制过程与主轴电动机M1点动正转启动、停止制动控制过程相同。
4.平旋盘的控制
平旋盘也是由主轴电动机M1拖动工作的。30区中中间继电器K27在14号线与0号线间的常闭触点为平旋盘误入三档速度时的保护触点;34区中行程开关ST3的常闭触点及60区中行程开关ST3的常开触点担负着接通和断开主轴或平旋盘进给的转换作用;111区和112区中电阻器R4和R5分别调整平旋盘的两档转速。
主轴的速度调节和平旋盘的速度调节是用一个速度操作手柄进行的,主轴有三档速度(即当113区、114区、119区中行程开关ST5、ST6、ST7闭合时有三档不同的主轴速度)。平旋盘则只有两档速度(即当113区、114区中行程开关ST5、ST6闭合时平旋盘有两档不同的速度)。在119区电路中,当速度操作手柄误操作将速度扳到三档位置时,中间继电器K27闭合,其在30区中14号线与0号线间的常闭触点断开,切断接触器KM1、KM2及中间继电器K1、K2线圈的电源,主轴电动机M1反而不能启动运转,已启动运行的则停止运行。
5.主轴及平旋盘的调速控制
主轴及平旋盘的调速是通过电动机M6拖动钢球无级变速器实现的。当钢球变速拖动电动机M6拖动钢球无级变速器正转时,变速器的转速就上升;当钢球变速拖动电动机M6拖动钢球无级变速器反转时,变速器的转速就下降。当变速器的转速为3000r/min时,测速发电机BR发出的电压约为50V,此时有关元件应立即动作,切断钢球拖动电动机M6的正转电源,使变速器的转速不再上升。当变速器的转速为500r/min时,测速发电机BR发出的电压约为8.3V,有关元件也应立即动作,切断钢球拖动电动机M6的反转电源,使变速器的转速不再下降。
(1)主轴升速控制 当需要主轴升速时,按下129区中钢球无级变速升速启动按钮SB16,按钮SB16在130区中338号线与339号线间的常开触点闭合,接通中间继电器K30线圈的电源,中间继电器K30通电吸合,其在133区320号线与345号线间的常开触点和136区中347号线与电阻器R20的中间抽头线相连接的常开触点闭合。
中间继电器K30在133区中320号线与345号线间的常开触点闭合,接通了钢球无级变速电子控制电路的电源;中间继电器K30在136区中347号线与电阻器R20的中间抽头线相连接的常开触点闭合,接通了从110区中交流测速发电机BR发出的电压经整流滤波后由309号线和311号线输出加在电阻器R20上经中间抽头分压后的部分电压U2。这个电压U2与由303号线与306号线从109区中引来加在138区中电阻R21上的参考电压U1经过电阻R15后反极性串联进行比较,并在电阻R15上产生一个控制电压U,U=|U2-U1|。当参考电压U1高于测速发电机BR输出电压中的部分电压U2时,在电阻R15中有电流流过,亦即在135区中306号线与347号线之间有电流流过,且电流方向是从306号线流向347号线,此时306号线的电位高于347号线。由于306号线与135区中三极管V6的发射极相连接,而347号线与135区中的二极管的阳极相连接,故三极管V6处于截止状态,此时控制电压U对钢球无级变速电子控制电路不起作用。三极管V6在由306号线和320号线在120区中稳压二极管V2两端取出的给定电压作用下饱和导通。其通路为:120区中306号线→135区306号线→三极管V6发射极→三极管V6基极→346号线→电阻R17→345号线→中间继电器K30常开触点→133区320号线→120区320号线。由于三极管V6饱和导通,故三极管V7截止,而三极管V8饱和导通,此时中间继电器K32串联在三极管V8的基极回路中,流过中间继电器K32的电流较小,因此中间继电器K32不闭合,但中间继电器K33通电闭合。中间继电器K33在130区中340号线与341号线间的常开触点闭合,接通接触器KM11线圈的电源,接触器KM11通电吸合,其在10区的主触点接通钢球变速拖动电动机M6的正转电源,钢球拖动电动机M6正向启动运转,拖动钢球无级变速器升速。当升到所需的转速时,松开钢球无级变速升速启动按钮SB16,中间继电器K30失电释放,其133区、136区中的常开触点复位断开,使得中间继电器K33和接触器KM11相继失电释放,钢球变速拖动电动机M6停止正转,完成升速控制过程。
若按下主轴升速启动按钮SB16一直不松开,则主轴的转速一直上升,而与主轴同轴相连的测速发电机BR的转速也随之上升。当变速器的转速达到3000r/min时,从测速发电机BR发出的电压经整流滤波后取出的取样电压U2略高于参考电压U1;在135区电阻R15两端的电压中,347号线的电位高于306号线的电位,故流过电阻R15上的电流方向为从347号线流入306号线。此时控制电压U使二极管V4和V5立即导通,三极管V6的发射极加上反偏电压;三极管V6立即截止;三极管V7基极电压降低,立即进入饱和状态,其集电极电位急剧下降,使三极管V8基极电位上升而截止;中间继电器K33失电释放,继而接触器KM11失电释放,钢球变速拖动电动机M6停止正转。而三极管V7饱和导通,中间继电器K32通电吸合动作,132区中的常开触点虽然闭合,但此时按钮SB16并未松开,按钮SB16在131区中338号线与342号线间的触点没有复位闭合,且按钮SB17也没有按下去,按钮SB17在131区中342号线与343号线间的常开触点也没有闭合,因此中间继电器K31和接触器KM12不会通电吸合,钢球拖动电动机M6不会反转。
(2)主轴降速控制 当需要主轴降速时,按下131区中钢球无级变速减速启动按钮SB17,按钮SB17在342号线与343号线间的常开触点闭合,接通中间继电器K31线圈的电源,中间继电器K31通电吸合,其在134区320号线与345号线间的常开触点和136区中309号线与347号线间的常开触点闭合。中间继电器K31在134区中320号线与345号线间的常开触点闭合,接通了钢球无级变速电子控制电路的电源;中间继电器K31在136区中309号线与347号线间的常开触点闭合,接通了从110区中交流测速发电机BR发出的电压经整流滤波后由309号线和311号线输出加在电阻器R20上的电压U22。电压U22与由303号线和306号线从109区中引来加在138区中电阻R21上的参考电压U1经过电阻R15后反极性串联进行比较,并在电阻R15上产生一个控制电压U,U=U22-U1。由于U22大于U1,因而在电阻R15上产生的控制电压为上正下负,即347号线端为正,306号线端为负。此时二极管V4、V5导通,三极管V6截止,三极管V7饱和导通,三极管V8截止。三极管V7饱和导通,使得中间继电器K32通电动作,中间继电器K32在132区中的常开触点闭合,接通接触器KM12线圈的电源,接触器KM12通电闭合,其11区中的主触点接通钢球变速拖动电动机M6的反转电源,钢球变速拖动电动机M6反向启动运转,拖动变速器减速。当转速降到所需速度时,松开钢球无级变速减速启动按钮SB17,中间继电器K31失电释放,其134区、136区中的常开触点复位断开,使得中间继电器K32和接触器KM12相继失电释放,钢球变速拖动电动机M6停止反转,完成减速控制过程。(https://www.xing528.com)
若按下主轴减速启动按钮SB17一直不松开,则主轴的转速一直下降,而与主轴同轴相连的测速发电机BR的转速也随之下降。当变速器的转速下降至500r/min时,从测速发电机BR发出的电压经整流滤波后取出的取样电压U22低于参考电压U1;在135区电阻R15两端的电压中,347号线的电位低于306号线的电位,故流过电阻R15上的电流方向为从306号线流入347号线。此时控制电压U使二极管V4和V5立即截止,三极管V6在由306号线和320号线在12区中稳压二极管V2两端取出的给定电压作用下饱和导通,三极管V7立即截止,使得中间继电器K32断电释放,继而接触器KM12失电释放,钢球变速拖动电动机M6停止反转,三极管V8饱和导通,中间继电器K33通电吸合动作,130区中的常开触点虽然闭合,但此时按钮SB17并未松开,按钮SB17在129区中339号线与340号线间的触点没有复位闭合,且按钮SB16也没有按下去,按钮SB16在129区中338号线与339号线间的常开触点也没有闭合,因此中间继电器K30和接触器KM11不会通电吸合,钢球拖动电动机M6不会正转。
(3)平旋盘的调速控制 平旋盘的调速控制原理与主轴的调速控制原理相同,不同之处在于平旋盘调速时,应将平旋盘操作手柄扳至接通位置。
6.进给控制
机床的进给控制分为主轴进给、平旋盘刀架进给、工作台进给及主轴箱的进给控制等。机床的各种进给运动都是由控制电路控制电磁阀的动作,从而控制液压系统对各种进给运动进行驱动的。
(1)主轴向前进给控制
1)初始条件:平旋盘通断操作手柄扳至“断开”位置;液压泵电动机M2和润滑泵电动机M3已启动且运转正常;压力继电器KP2(52区)、KP3(79区)的常开触点已闭合;中间继电器K7(52区)、K17(79区)、K18(80区)通电闭合。
2)操作:将十宇开关SA5扳至左边位置档,中间继电器K18失电释放,而中间继电器K17仍然通电吸合。
3)松开主轴夹紧装置:当机床使用自动进给时,行程开关ST4在61区中的常开触点闭合,中间继电器K9通电闭合,为电磁阀YV3a线圈的通电做好了准备。且K9接通了电磁阀YV8线圈的电源,YV8动作,接通主轴松开油路,使主轴夹紧装置松开。
4)主轴快速进给控制:当需要主轴快速进给时,按下100区中的点动快速进给按钮SB12,中间继电器K20线圈和电磁阀YV1线圈通电。电磁阀YV1动作,关闭低压油泄放阀,使液压系统能推动进给机构快速进给。中间继电器K20动作,使电磁阀YV3a通电动作,主轴选择前进进给方向,且K20接通快速进给电磁阀YV6a线圈的电源,电磁阀YV6a动作。电磁阀YV3a和电磁阀YV6a动作的组合使机床压力油按预定的方向进入主轴液压缸,驱动主轴快速前进。
松开点动快速进给按钮SB12,中间继电器K20失电释放,电磁阀YV1、YV3a、YV6a先后失电释放,完成主轴快速进给控制过程。
5)主轴工作进给控制:当需要主轴工作进给时,按下102区中的工作进给按钮SB13,中间继电器K21线圈通电吸合并自锁,接通工作进给指示信号灯电源,工作进给指示灯亮,显示主轴正在工作进给,同时接通中间继电器K22线圈的电源,继而接通了电磁阀YV3a和YV6b的电源,电磁阀YV3a和YV6b动作,主轴以工作进给速度移动。
当需要停止主轴工作进给时,按下30区中的主轴停止按钮,或将十宇开关SA5扳至中间位置档,主轴停止工作进给。
6)主轴点动工作进给控制:当需要主轴点动工作进给时,按下104区中的主轴点动工作进给按钮SB14,中间继电器K22通电闭合,继而接通了电磁阀YV3a和YV6b的电源,电磁阀YV3a和YV6b动作,使高压油按选择好的方向进入主轴油箱,主轴以工作进给速度移动。
松开主轴点动工作进给按钮SB14,中间继电器K22失电释放,继而电磁阀YV3a和YV6b失电,主轴停止进给。
7)主轴进给量微调控制:当主轴需要对进给量进行微调控制时,按下99区中主轴微调点动按钮SB15,中间继电器K23通电闭合,继而接通电磁阀YV3a和YV7的电源,电磁阀YV3a和YV7通电动作,使主轴以很微小的移动量进给。
松开主轴微调点动按钮SB15,主轴停止微调量进给。
(2)平旋盘进给控制 平旋盘的进给控制与主轴的进给控制相同,它也有点动快速进给、工作进给、点动工作进给、点动微调进给控制,同样由按钮SB12、SB13、SB14、SB15分别控制。当需要对平旋盘进行控制时,只需将平旋盘通断操作手柄扳至接通位置,其他操作与主轴进给控制相同。
(3)主轴后退运动控制 主轴后退运动控制与主轴进给控制相同,也有点动快速进给、工作进给、点动工作进给、点动微调进给控制,同样由按钮SB12、SB13、SB14、SB15分别控制。当需要对主轴进行后退运动控制时,应将平旋盘通断操作手柄扳至断开位置,并将十宇开关SA5扳至右边位置档,其他操作与主轴的进给控制相同。
(4)主轴箱的进给控制 主轴箱可上升或下降进给。将十宇开关SA5扳至上边位置档,主轴箱上升进给;将十宇开关SA5扳至下边位置档,主轴箱下降进给。
1)主轴箱上升进给控制:将十宇开关SA5扳至上边位置档,67区中的SA5-3常开触点闭合,SA5其他常开触点断开;80区中的SA5-3常闭触点断开,SA5其他常闭触点闭合。中间继电器K17闭合,同时中间继电器K11通电闭合,继而接通电磁阀YV9、YV10的电源。电磁阀YV9动作,驱动主轴箱夹紧机构松开;电磁阀YV10动作,供给润滑油对导轨进行润滑。中间继电器K11接通主轴箱向上进给电磁阀YV5a的电源,主轴箱被选择为向上进给。分别按下按钮SB12、SB13、SB14、SB15,可分别进行主轴箱上升的点动快速进给、工作进给、点动工作进给及点动微调进给控制。
2)主轴箱下降进给控制:将十宇开关SA5扳至下边位置档,69区中的SA5-4常开触点闭合,SA5其他常开触点断开;80区中的SA5-4常闭触点断开,SA5其他常闭触点闭合。中间继电器K17闭合,同时69区中间继电器K12通电闭合。中间继电器K12接通电磁阀YV9、YV10的电源,电磁阀YV9、YV10动作,驱动主轴箱夹紧机构松开及对导轨进行润滑。中间继电器K12接通主轴箱向下进给电磁阀YV5b的电源,主轴箱被选择为下降进给。分别按下按钮SB12、SB13、SB14、SB15,可分别进行主轴箱下降的点动快速进给、工作进给、点动工作进给及点动微调进给控制。
(5)工作台的进给控制 工作台的进给控制分为纵向后退、纵向前进、横向后退和横向前进方向进给。
1)工作台纵向后退进给控制:将十宇开关SA6扳至左边位置档,71区中的SA6-1常开触点闭合,SA6其他常开触点断开;79区中的SA6-1常闭触点断开,SA6其他常闭触点闭合。这使得中间继电器K17断开,中间继电器K18闭合。中间继电器K18接通中间继电器K13的电源,中间继电器K13通电闭合,接通电磁阀YV13、YV18的电源。电磁阀YV13、YV18动作,驱动下滑座夹紧机构松开及供给导轨润滑油。中间继电器K13接通工作台纵向后退进给电磁阀YV2b的电源,工作台被选择为纵向后退进给。分别按下按钮SB12、SB13、SB14、SB15,可分别进行工作台纵向后退运动的点动快速进给、工作进给、点动工作进给及点动微调进给控制。
2)工作台纵向前进进给控制:工作台纵向前进进给控制的原理与工作台纵向后退进给控制原理相同。在对工作台进行纵向前进进给控制时,须将十宇开关SA6扳至右边位置档。
3)工作台横向后退进给控制:当需要工作台横向后退进给时,将十宇开关SA6扳至上边位置档,75区中的SA6-3常开触点闭合,SA6其他常开触点断开;79区中的SA6-3常闭触点断开,SA6其他常闭触点闭合。中间继电器K17断开,中间继电器K18闭合。中间继电器K18接通中间继电器K15的电源,中间继电器K15接通电磁阀YV12、YV17的电源,电磁阀YV12、YV17动作,驱动上滑座夹紧机构松开及供给导轨润滑油。中间继电器K15接通工作台横向后退进给电磁阀YV4b的电源,工作台被选择为横向后退进给。分别按下按钮SB12、SB13、SB14、SB15,可分别进行工作台纵向后退运动的点动快速进给、工作进给、点动工作进给及点动微调进给控制。
4)工作台横向前进进给控制:工作台横向前进进给控制的原理与工作台横向后退进给控制原理相同。在对工作台进行横向前进进给控制时,须将十宇开关SA6扳至下边位置档。
7.工作台回转控制
工作台回转运动由回转工作台电动机M4拖动,工作台的夹紧及放松和回转90°的定位由液压系统控制。可以手动控制机床工作台的回转运动,也可以自动进行控制。
(1)工作台自动回转控制 将47区中工作台回转自动及手动转换开关SA4扳至“自动”档,按下44区中工作台正向回转启动按钮SB8,中间继电器K4通电闭合,继而接通电磁阀YV16和YV11的电源,电磁阀YV16和YV11通电动作。同时中间继电器K4切断中间继电器K7线圈的电源,中间继电器K7失电释放,继而切断中间继电器K17、K18线圈的电源通路,使工作台在回转时其他进给不能进行。
电磁阀YV16动作,接通工作台压力导轨油路,给工作台压力导轨充压力油。电磁阀YV11动作,接通工作台夹紧机构的放松油路,使夹紧机构松开。工作台夹紧机构松开后,机械装置压下行程开关ST2,ST2在128区中的常开触点被压下闭合,中间继电器K26在电子装置的控制下短时闭合,接通中间继电器K6线圈的电源,中间继电器K6通电闭合并自锁,并接通电磁阀YV10的电源,YV10通电动作,将定位销拔出并使传动机构的蜗轮与蜗杆啮合。
在拔出定位销的过程中,机械装置压下行程开关ST1,ST1在126区中的常开触点被压下闭合,短时接通中间继电器K25线圈的电源,中间继电器K25短时闭合,接通接触器KM7线圈电源,接触器KM7通电闭合并自锁,使工作台回转拖动电动机M4拖动工作台正向回转。
当工作台回转过90°时,压下行程开关ST8,ST8在125区中的常开触点闭合,短时接通中间继电器K29线圈的电源,中间继电器K29通电闭合,切断接触器KM7线圈电源通路,接触器KM7失电释放,工作台回转电动机M4断电停止正转,完成正向回转。同时,中间继电器K29在50区中的常开触点闭合,接通通电延时时间继电器KT2线圈的电源。时间继电器KT2通电闭合并自锁,为中间继电器K4断电做好了准备。
KT2在55区中的延时断开常闭触点经过通电延时一定时间后断开,切断中间继电器K6线圈的电源,使电磁阀YV10断电,传动机构的蜗轮与蜗杆分离,定位销插入销座,压力继电器KP1动作,中间继电器K4断电释放,时间继电器K2、电磁阀YV11及YV16失电,工作台夹紧,完成工作台自动回转的控制。
(2)工作台回转电动机M4的停车制动控制 工作台回转电动机M4的停车制动控制电路结构比较简单,它采用了电容式能耗制动线路。当工作台回转电动机M4停车时,接触器KM7或KM8失电释放,在7区中接触器KM7或KM8的常闭触点复位闭合,电容器C13通过电阻R23对工作台回转电动机M4绕组放电产生直流电流,从而产生制动力矩对工作台回转电动机M4进行能耗制动,工作台回转电动机M4迅速停止转动。
(3)工作台手动回转控制将 48区中的工作台回转自动及手动转换开关SA4扳至“手动”档,则可对工作台进行手动回转控制。此时电磁阀YV16、YV11通电动作,电磁阀YV11使工作台松开,电磁阀YV16使压力导轨充油。工作台松开后,压下128区中的行程开关ST2,ST2的常开触点被压下闭合,继而中间继电器K26、K6及电磁阀YV10先后通电动作并将定位销拔出,此时即可用手轮操作工作台微量回转,实现工作台手动回转控制。
8.尾架电动机M5和冷却泵电动机M7的控制
(1)尾架电动机M5的控制 尾架电动机M5的控制电路为点动控制电路。当按下尾架电动机M5的正转点动按钮SB10时,尾架电动机M5正向启动运转,尾架上升;当按下尾架电动机M5的反转点动按钮SB11时,尾架电动机M5反向启动运转,尾架下降。
(2)冷却泵电动机M7的控制 冷却泵电动机M7由单极开关SA1控制接触器KM13线圈电源的通断来进行控制。当单极开关SA1闭合时,冷却泵电动机M7通电运转;当单极开关SA1断开时,冷却泵电动机M7停转。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。