



Z3040摇臂钻床电气控制电路的图解分析法识读如图4-10所示。它主要包括主轴电动机M1的控制,摇臂升降电动机M2、液压泵电动机M3和冷却泵电动机M4的控制以及立柱主轴箱的松开和夹紧控制等。
主轴电动机M1提供主轴转动的动力,是钻床加工主运动的动力源;主轴应具有正反转功能,但主轴电动机只有正转工作模式,反转由机械方法实现。冷却泵电动机用于提供冷却液,只需正转。摇臂升降电动机提供摇臂升降的动力,需要正反转。液压泵电动机提供液压油,用于摇臂、立柱和主轴箱的夹紧和松开,也需要正反转。
Z3040摇臂钻床的操作主要通过手轮及按钮实现,手轮用于主轴箱在摇臂上的移动,这是手动的。按钮用于主轴的启动/停止、摇臂的上升/下降、立柱主轴箱的夹紧/松开等操作,再配合限位开关实现对机床的调控。
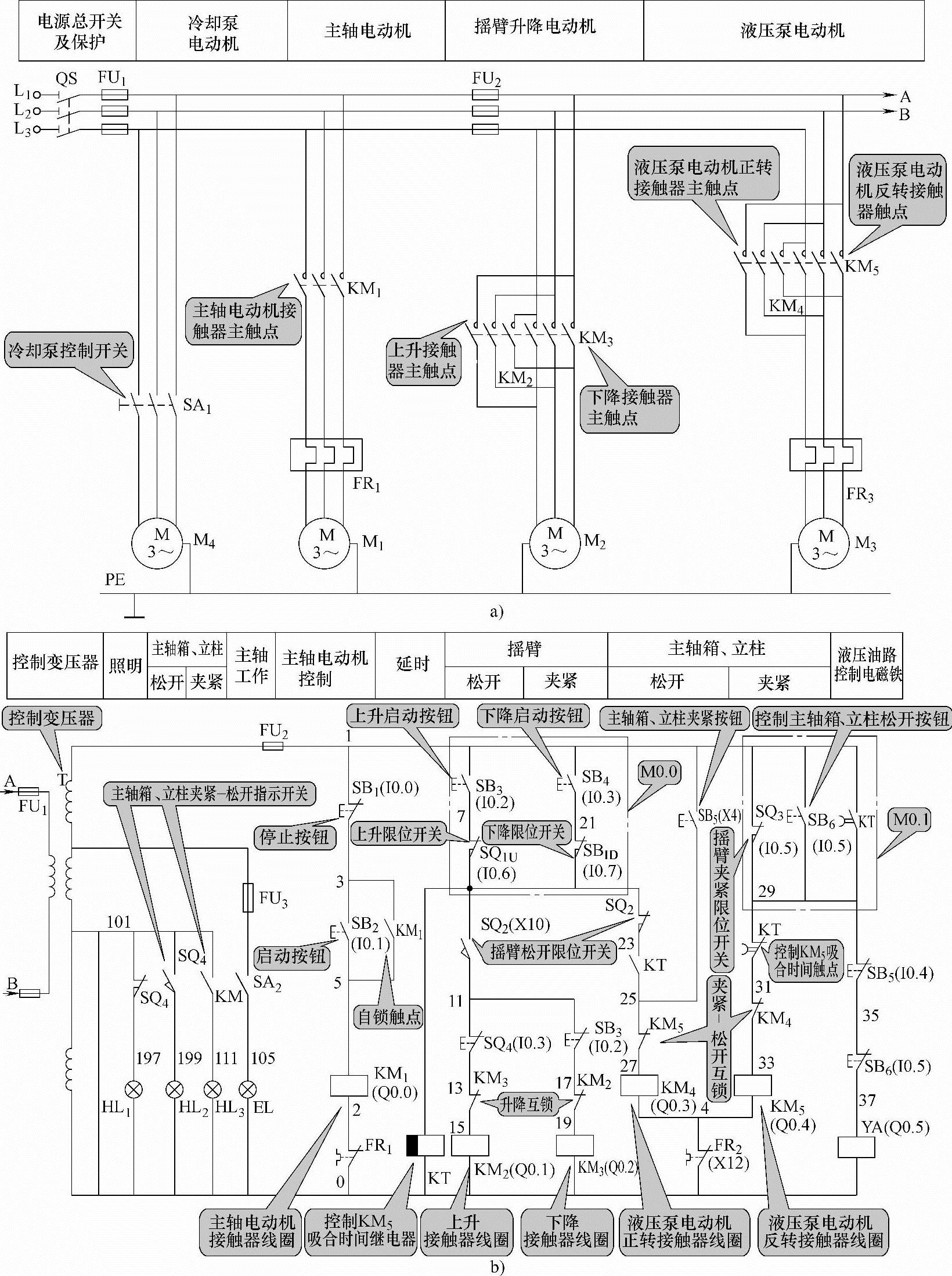
图4-10 Z3040摇臂钻床的电气控制电路图解分析法识读
a)主电路 b)控制电路(https://www.xing528.com)
(1)主轴电动机M1的控制 按下按钮SB2,接触器KM1得电吸合并自锁,主轴电动机M1启动运转,指示灯HL3亮。按下停止按钮SB1时,接触器KM1失电释放,M1失电停止运转。热继电器FR1起过载保护作用。
(2)摇臂升降电动机M2和液压泵电动机M3的控制 按下按钮SB3(或SB4)时,断电延时时间继电器KT导电吸合,接触器KM4和电磁铁YA得电吸合。液压泵电动机M3启动运转,供给压力油,压力油经液压阀进入摇臂松开油腔,推动活塞和菱形块使摇臂松开。同时限位开关SQ2被压住,SQ2的常闭触点断开,接触器KM4失电释放,液压泵电动机M3停止运转。SQ2的常开触点闭合,接触器KM2(或KM3)得电吸合,摇臂升降电动机M2启动运转,使摇臂上升(或下降)。若摇臂未松开,SQ2的常开触点不闭合,接触器KM2(或KM3)也不能得电吸合,摇臂就不可能升降。摇臂升降到所需位置时松开按钮SB3(或SB4),接触器KM2(或KM3)和时间继电器KT失电释放,电动机M2停止运转,摇臂停止升降。时间继电器KT延时闭合的常闭触点经延时闭合,使接触器KM5吸合,液压泵电动机M3反方向运转,供给压力油。经过机械液压系统,压住限位开关SQ3,使接触器KM5释放。同时,时间继电器KT的常开触点延时断开,电磁铁YA释放,液压泵电动机M3停止运转。
KT的作用是控制KM5的吸合时间,保证M2停转、摇臂停止升降后再进行夹紧。摇臂的自动夹紧升降由限位开关SQ3来控制。压合SQ3,使KM2或KM3失电释放,摇臂升降电动机M2停止运转。摇臂升降限位保护由上下限位开关SQ1U和SQ1D实现。上升到极限位置后,常闭触点SQ1U断开,摇臂自动夹紧,与松开上升按钮动作相同;下降到极限位置后,常闭触点SQ1D断开,摇臂自动夹紧,与松开下降按钮动作相同;SQ1的两对常开触点需调整在“同时”接通位置,动作时一对接通、一对断开。
(3)立柱、主轴箱的松开和夹紧控制 按动松开按钮SB5(或夹紧按钮SB6),KM4(或KM5)吸合,M3启动,供给压力油,通过机械液压系统使立柱和主轴箱分别松开(或夹紧),指示灯亮。主轴箱、摇臂和内外立柱三部分的夹紧均由M3带动的液压泵提供压力油,通过各自的液压缸使其松开和夹紧。
(4)冷却泵电动机M4的控制 冷却泵电动机M4由转换开关SA1控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。