



1.Z35型摇臂钻床的电气原理图
Z35型摇臂钻床电气原理图如图4-9所示。
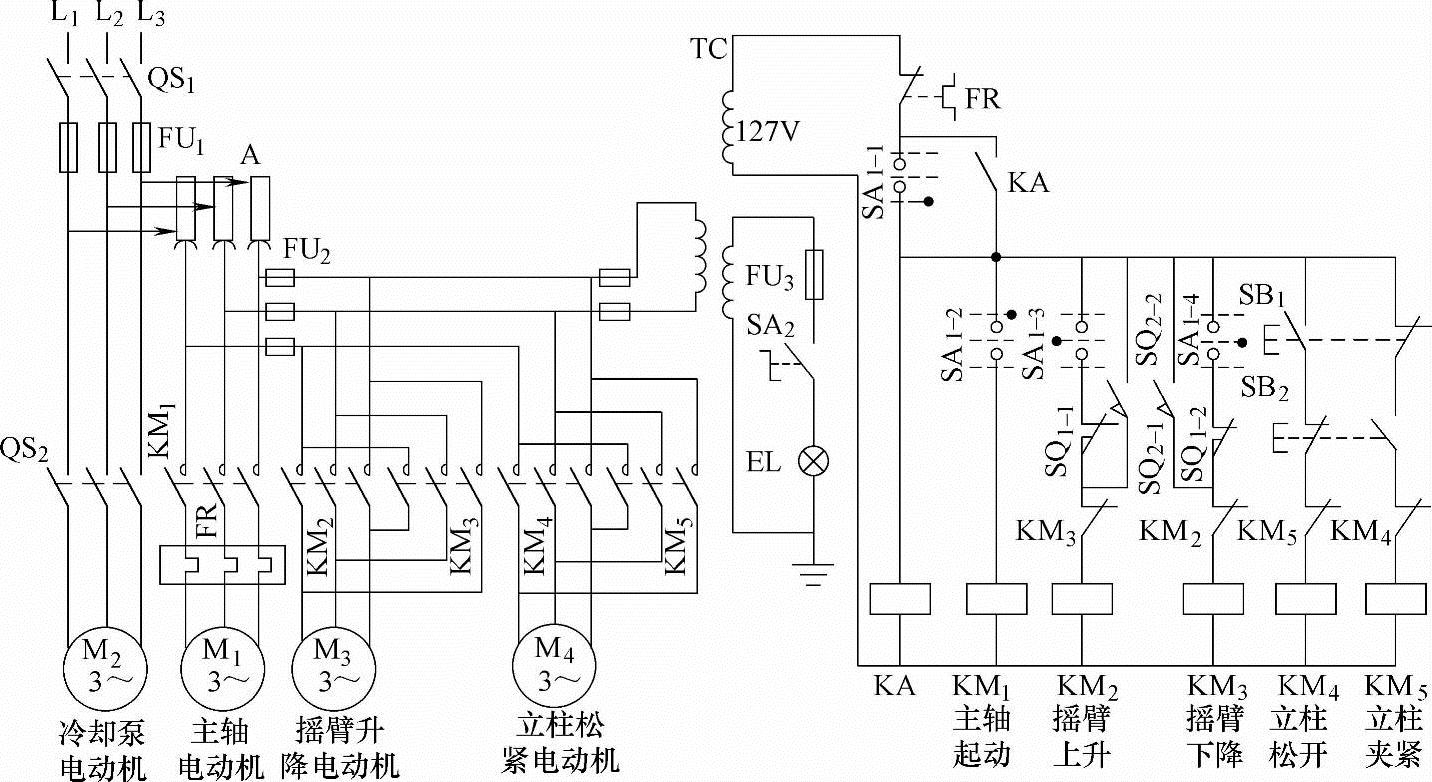
图4-9 Z35型摇臂钻床电气原理
2.Z35型摇臂钻床电气控制线路的识读分析
(1)主电路 Z35型摇臂钻床主电路由M1、M2、M3、M4四台电动机,KM1、KM2、KM3、KM4、KM5的主触点,FU1、FU2及FR等组成。主轴电动机M1只作单方向运转,由接触器KM1的常开主触点控制;冷却泵电动机M2是通过转换开关QS2直接控制的;摇臂升降电动机M3和立柱松紧电动机M4都需要作正反向运动,各由两只接触器KM2、KM3和KM4、KM5控制。四台电动机中只有主轴电动机M1通过热继电器FR实现过载保护,电动机M3和M4都是短时运行,所以不设过载保护。熔断器FU1作总短路保护,电动机M3和M4通过熔断器FU2作短路保护。冷却泵电动机M2容量较小,设过载保护和短路保护。
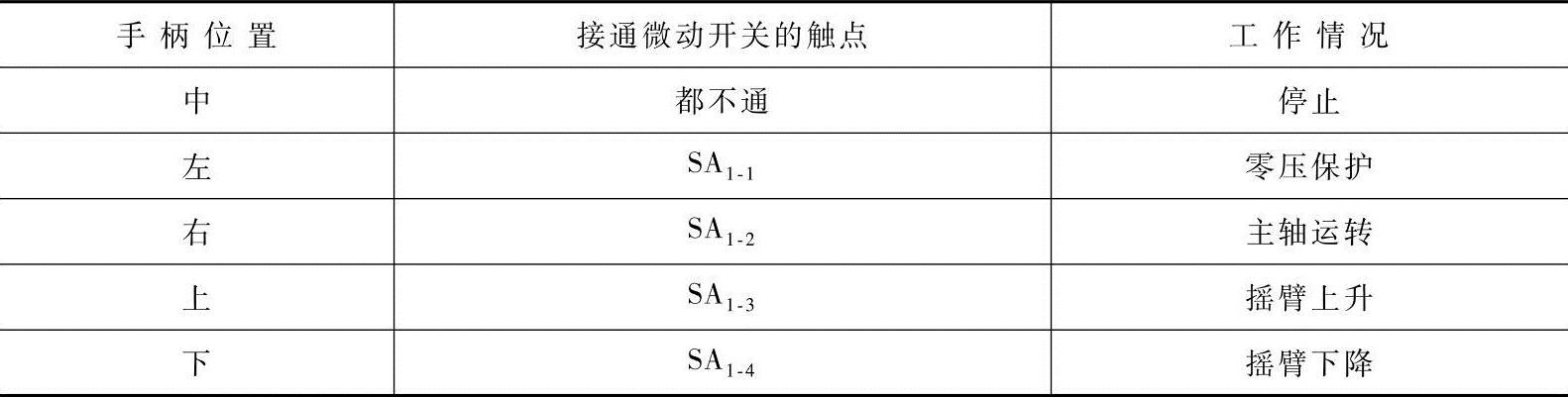
(2)控制电路 Z35型摇臂钻床控制电路中采用十宇开关SA操作,它有控制集中的优点。十宇开关由十宇手柄和4个微动开关组成,根据工作时的需要,将手柄分别扳到5个不同的位置,即左、右、上、下和中间位置,操作手柄每次只可扳在一个位置上。当手柄处在中间位置时,全部处于断开状态。十宇开关的操作说明见表4-2。
表4-2 十字开关操作说明
为了确保十宇开关手柄扳在任何工作位置时接通电源都不产生误动作,所以设有零压保护环节。每次接通电源或工作中电源中断后又恢复时,必须将十宇开关向左扳一次,使零压继电器KA通电吸合并自锁,然后扳向工作位置才能工作。当机床工作时,十宇开关不在左边,这时若电源断电,则KA失电,其自锁触点分断;电源恢复时,KA不会自行吸合,控制电路仍不通电,以防止工作中电源中断又恢复而造成的危险。
1)主轴电动机M1 的控制。控制回路由接触器KM1、十宇开关SA及零压继电器KA等组成。将十宇开关扳向左边,KA得电,常开触点闭合自锁,为其他电路接通做好准备。将十宇开关扳向右边,SA1-2闭合,接触器KM1线圈通电,常开主触点闭合,M1启动运转。主轴旋转方向是由主轴箱上的摩擦离合器手柄位置决定的。将十宇开关扳到中间位置时,SA1-2分断,KM1失电,主电动机M1停转。
2)摇臂升降电动机M3的控制。摇臂钻床正常工作时,摇臂应夹紧在立柱上,因此在摇臂上升或下降之前,首先应松开夹紧装置,当摇臂上升或下降到指定位置时,夹紧装置又必须将摇臂夹紧。这种“松开→升降→夹紧”的过程是由电气和机械机构联合配合实现自动控制的。现以摇臂上升为例,分析全过程的控制情况。(https://www.xing528.com)
将十宇开关扳向上边,微动开关触点SA1-3闭合,接触器KM2线圈得电,其常开主触点闭合,电动机M3正向运转,通过机械传动,使辅助螺母在丝杠上旋转上升,带动了夹紧装置松开,触点SQ2-2闭合,为摇臂上升后的夹紧动作做准备。
摇臂松开后,辅助螺母将继续上升,带动一个主螺母沿丝杠上升。主螺母则推动摇臂上升。当摇臂上升到预定高度时,将十宇开关扳到中间位置,上升接触器KM2断电,其常闭辅助触点恢复闭合,常开主触点分断,电动机M3停转,摇臂即停止上升。由于摇臂上升时触点SQ2-2闭合,所以KM2失电后,下降接触器KM3得电吸合,其常开主触点闭合,M3即反转,这时电动机通过辅助螺母使夹紧装置将摇臂夹紧,但摇臂并不下降。当摇臂完全夹紧时,SQ2-2触点随即断开,接触器KM3断电,电动机M3停转,摇臂上升动作全过程结束。
摇臂下降过程与摇臂上升过程类同,可参照其上升过程自行分析。
为了使摇臂上升或下降不致超过所允许的极限位置,故在摇臂上升和下降的控制回路中分别串入行程开关SQ1-1和SQ1-2的常闭触点。当摇臂上升或下降到极限位置时,由机械机构作用,使SQ1-1和SQ1-2常闭触点断开,切断KM2或KM3的回路,使电动机停止转动,从而起到了终端保护的作用。
3)立柱松紧电动机M4的控制。立柱松紧电动机M4是由复合按钮SB1和SB2及接触器KM4和KM5控制的。通过M4的正反转,实现立柱的松开与夹紧。当需要松开立柱时,按下按钮SB1,接触器KM4因线圈通电而吸合,电动机M4正向启动,通过齿式离合器拖动齿轮式液压泵转动,从一定方向送出高压油,经油路系统和传动机构将外立柱松开。此时放开按钮SB1,接触器KM4失电,电动机M4停转,可通过人力推动摇臂和外立柱绕内立柱转动。当转到所需位置时,按下SB2,接触器KM5得电吸合,主触点闭合,M4反向启动,在液压系统作用下将外立柱夹紧。松开SB2,接触器KM5断电,M4停转。整个过程“放松→转动→夹紧”就此结束。
接触器KM4和KM5均为点动控制方式,控制电路中设有按钮和接触器的双重联锁。
(3)照明电路 照明电路的电源由变压器TC提供36V的安全电压,照明灯EL由开关SA2控制,熔断器FU3作短路保护。为保证安全,EL一端必须接地。
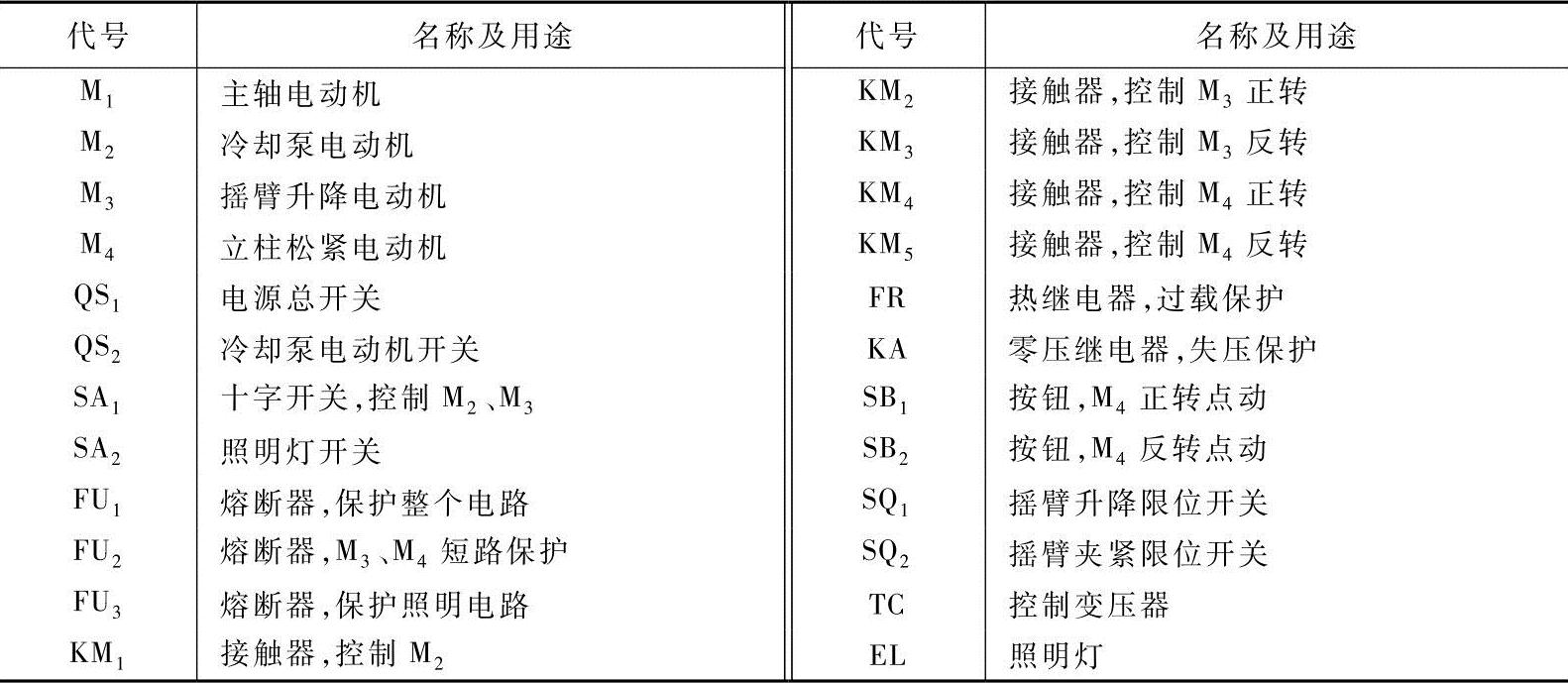
3.Z35型摇臂钻床的电气设备(见表4-3)
表4-3 Z35型摇臂钻床电气设备表
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。