



对ROBOTC软件有了一个大概的了解之后,就可以开始编程了。
首先,单击工具栏中的New File按钮,就会出现编程区,如图2-1所示。接下来就在这里编写程序吧。
图 2-1
编程之前先单击工具栏中的Motor and Sensor Setup按钮,对电动机(如图2-2所示)与传感器(如图2-3所示)进行设置,如图2-2所示。
(1)为电动机命名时不要取纯数字名字与汉字名字,尽量以英文命名。
(2)电动机型号可以选大型电动机与中型电动机等。
(3)Reversed如果打勾,电动机会反方向旋转。
(4)PID Control为默认状态,一般情况下不做任何修改。
(5)Drive Motor Side是为了方便用户分清电动机安装的左右,所以修改与否影响不大。
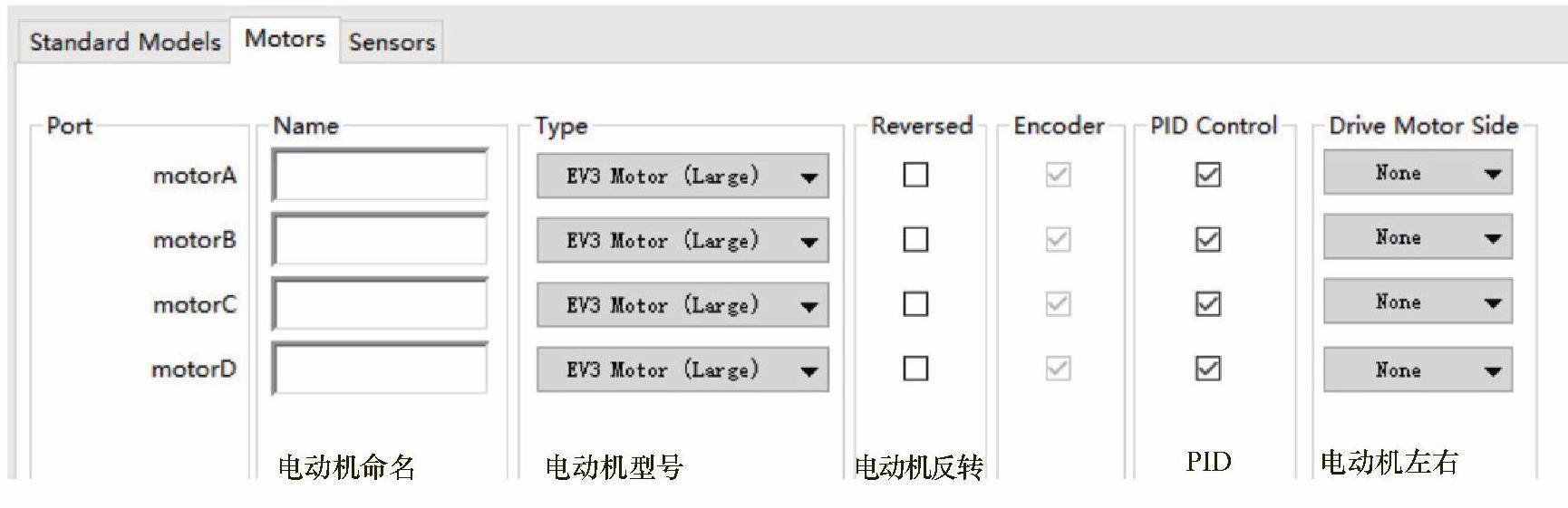
图 2-2
(6)Name:传感器与电动机相同,可以自已随意命名。
(7)Sensor Type:颜色传感器、超声波传感器、触动传感器等。
(8)Sensor Mode:颜色传感器的模式反射光强度、各类颜色等,如图2-3所示。
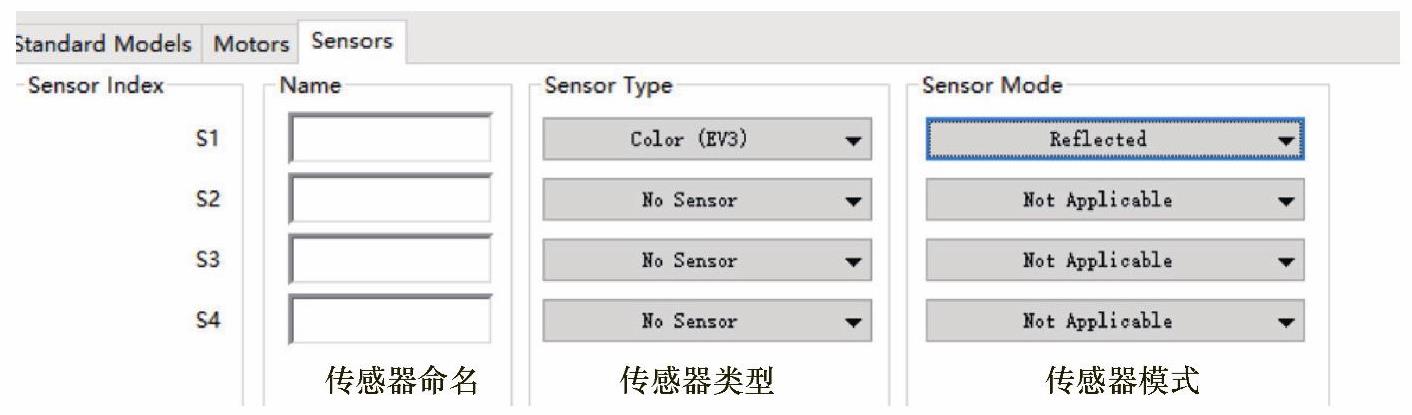
图 2-3
设置好电动机与传感器后,编程区会出现几行预处理命令。这些命令方便用户后续编程,不设置任何传感器也可以,全程只写端口名称,通过代码命令来选择传感器模式一样可以编译。建议每次先设置好电动机与传感器,以防出错,如图2-4所示。
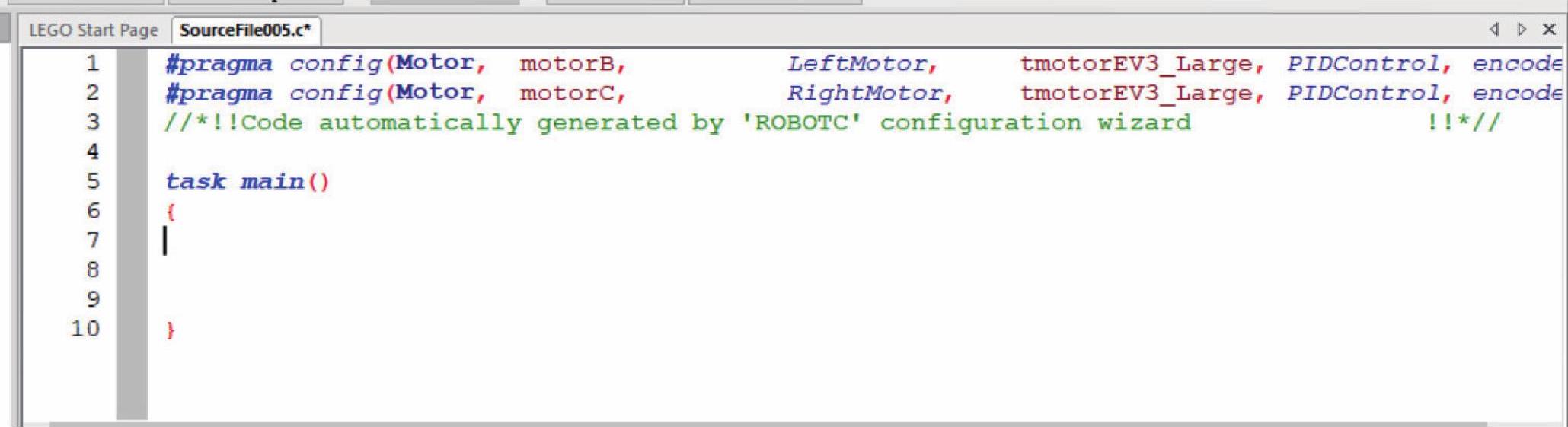
图 2-4
task main为主函数,所写的程序流程都要写在主函数里面,注意:要写在大括号{}之内。变量、常量、自定义的函数等可以写在外面。要设置电动机B的功率为100,要运动,两个电动机需要一起转,所以电动机C也是100,而用C语言表示则为:
setMotorSpeed(motorB,100);
setMotorSpeed(motorC,100);
以上两行代码设置电动机速度、电动机名称、功率。
注意C语言函数名的书写格式,第一个单词全部小写,后面两个单词首字母均为大写,三个单词后紧跟小括号(),电动机与传感器要执行的命令写在括号中,注意要用逗号“,”隔开,在小括号外再使用分号“;”结尾:setMotorSpeed(motorB,100);
设置好电动机速度之后,要为其设置运行时间,在这里以10s为例,在C语言中,时间单位是ms,所以就是10000ms,在C语言中用sleep表示电动机的运行时间,所以应该写为sleep(10000),如图2-5所示。
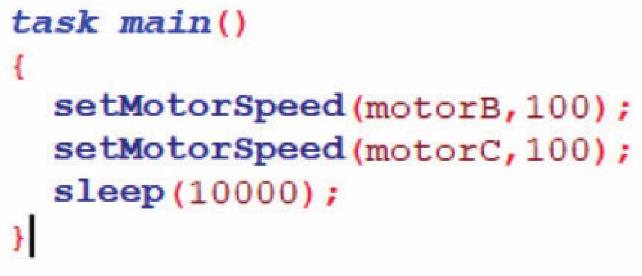
图 2-5
注意括号,每一个括号都不是单独的,一定会有一个反括号和它是一对的(不论是小括号、中括号还是大括号,它们总是成对出现的)。(https://www.xing528.com)
一个函数所带的小括号里面的内容,称为参数,如果有多个参数,需要用逗号分隔(注意所有代码和符号都必须是英文输入,否则会导致软件崩溃,需要重新启动)。
当程序写完之后,单击工具栏中的Compile Program按钮,进行编译,系统会将程序保存到指定位置,并且自动检查是否有错,如图2-6所示。

图 2-6
在编译区中,会显示文件保存位置和编译时间,没有提示错误,说明程序语法正确,可以进行下载。下载前需要先选择下载模式,下载到实体机或者虚拟世界(在这里先介绍虚拟世界)。
单击文件栏中的ROBOT菜单,选择Compiler Target/Virtual Worlds命令,如图2-7所示。
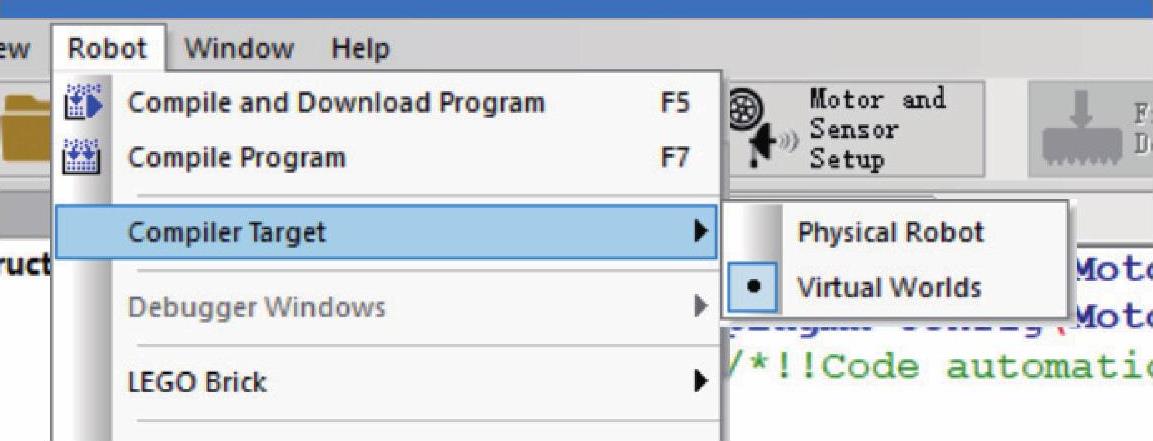
图 2-7
选择虚拟世界的挑战包(可自行下载更多挑战包),单击Window菜单,选择Select Virtual World to Use/Challenge Pack for EV3命令,如图2-8所示。
全部选择完毕之后,单击工具栏中的Download to ROBOT按钮,将程序下载到虚拟世界的机器人中,如图2-9所示。
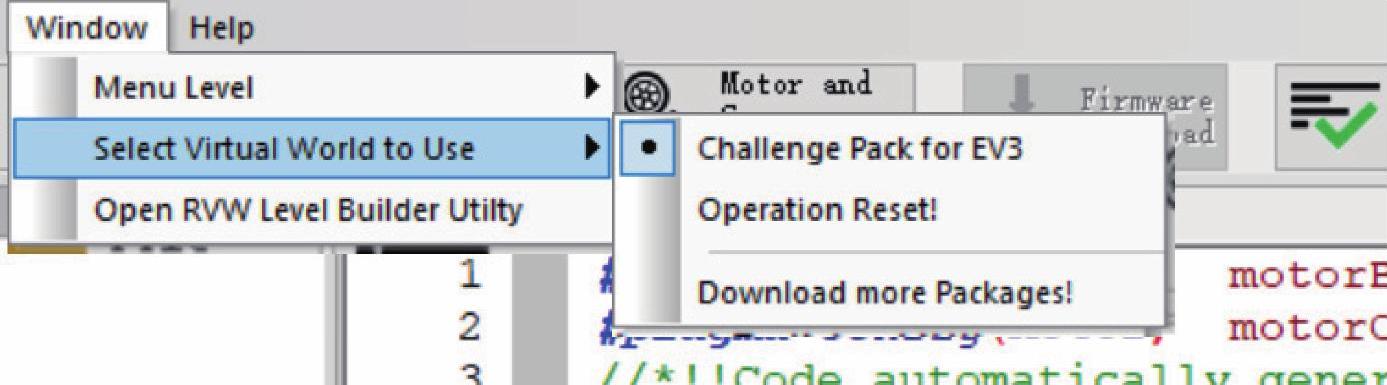
图 2-8
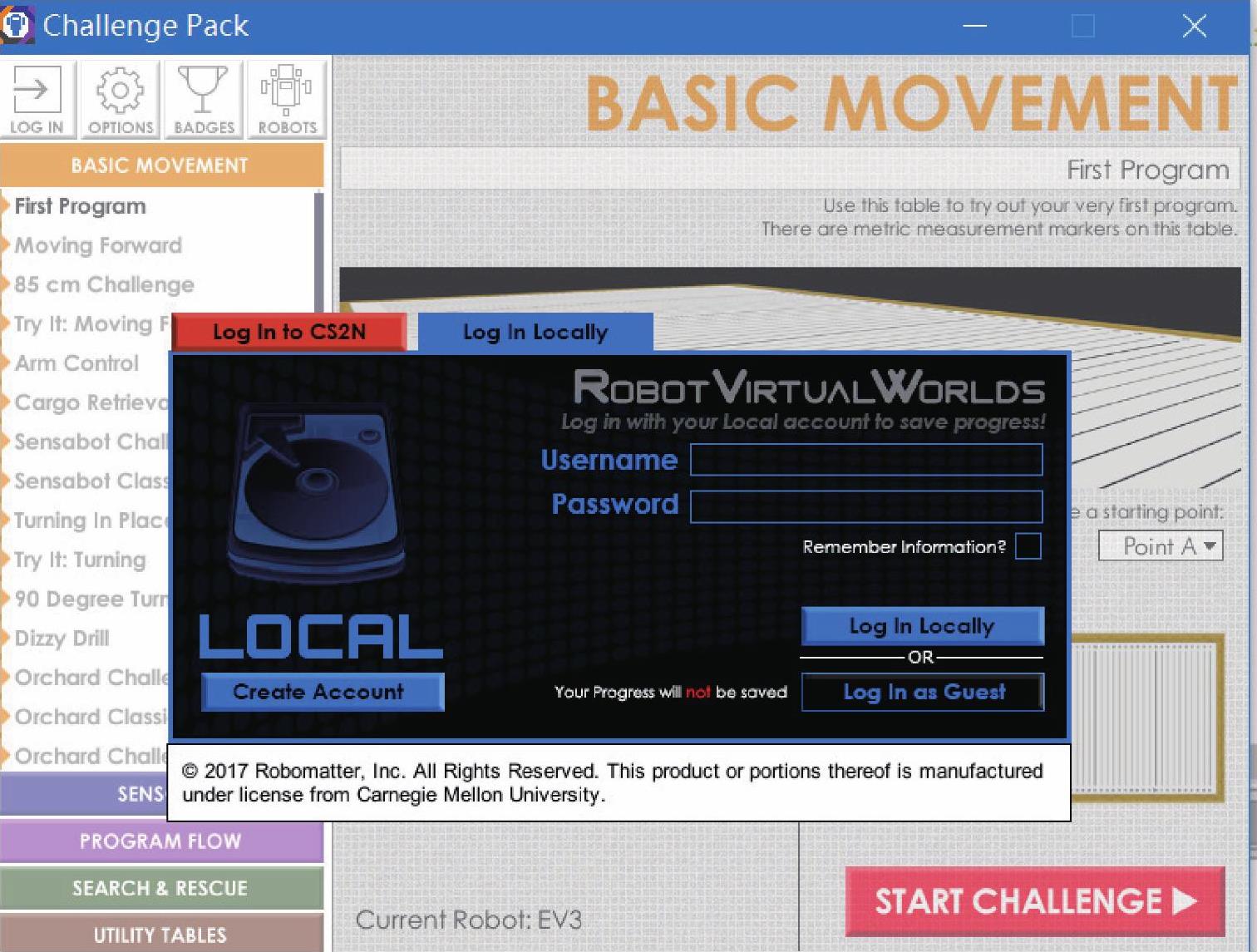
图 2-9
正如前文所述在虚拟世界登录界面单击Log In as Guest按钮,即可进入虚拟世界,再选择所用的机器人与地图。
单击工具栏中的ROBOTS可以看到机器人信息如图2-10所示。
图 2-10
在基础虚拟世界挑战包中有4个机器人可以选择,来进行不同地图的挑战任务,如图2-11所示。
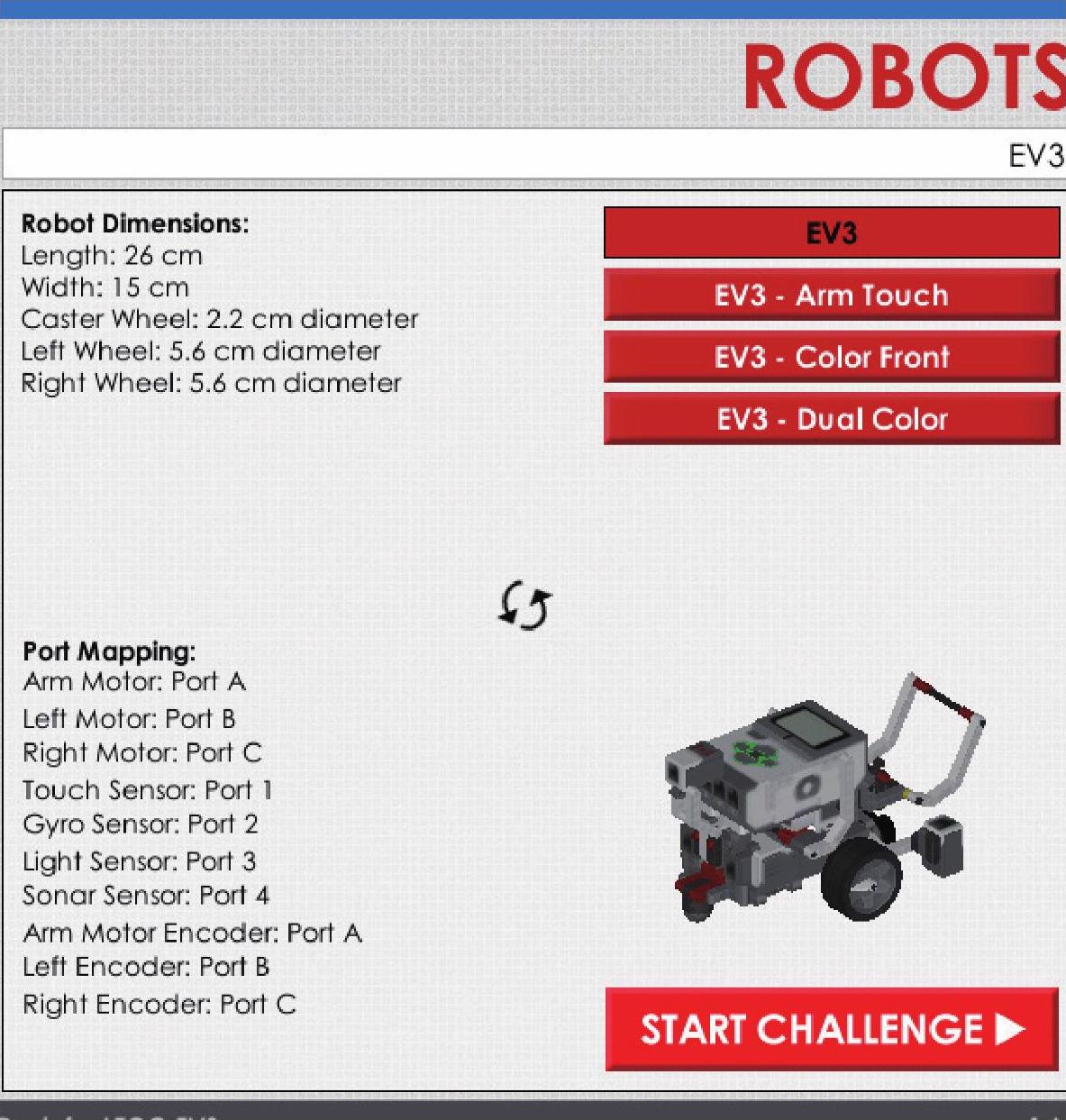
图 2-11
选择好机器人之后,再选择左侧地图,然后单击右下角的START CHALLENGE按钮进入挑战任务,如图2-12。
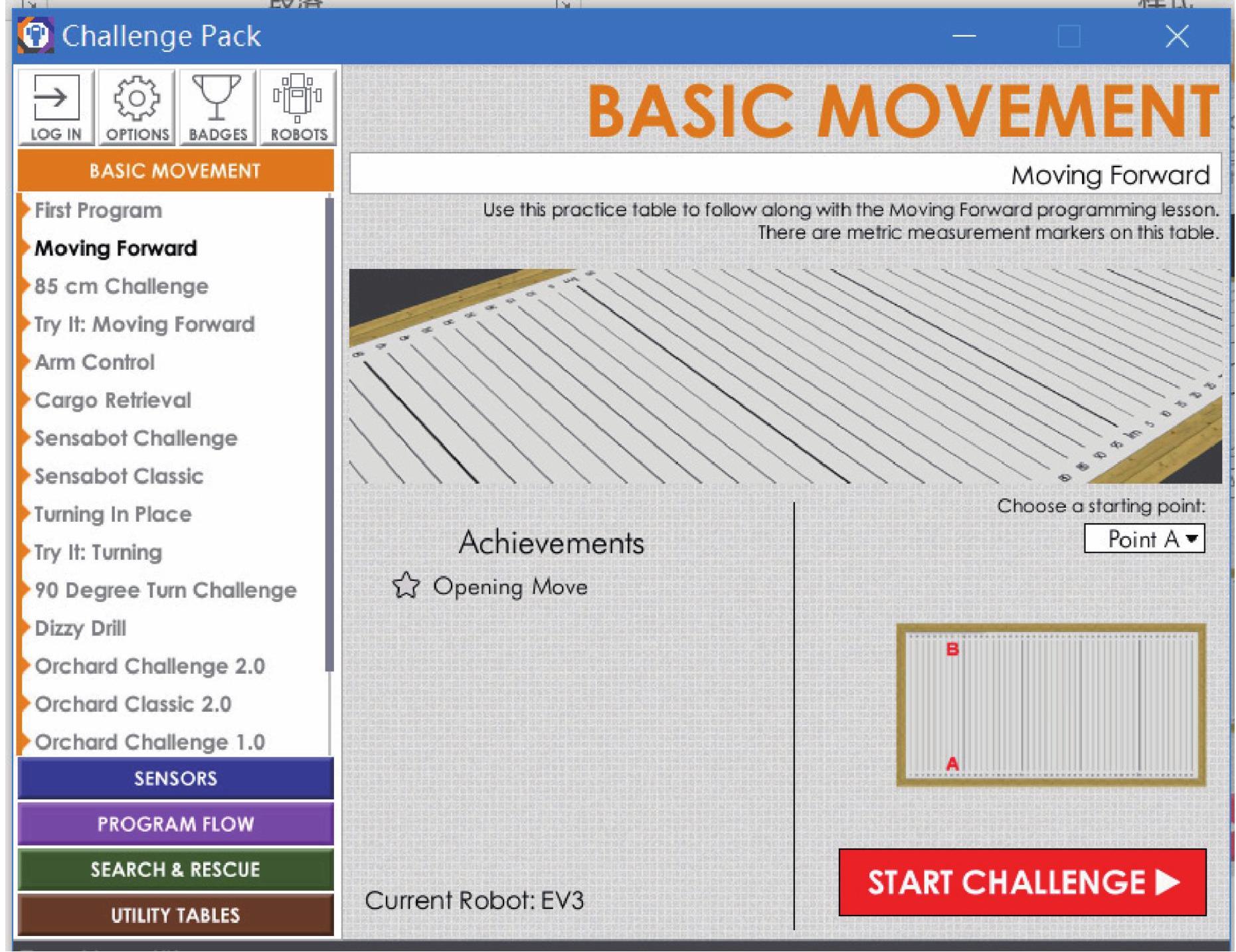
图 2-12
在挑战地图中单击左边的小三角按钮,小车开始运行。如果小车完成所写程序任务,则挑战成功,如果没有完成,则要回去检查在哪一步骤出错了,如图2-13所示。

图 2-13
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。