



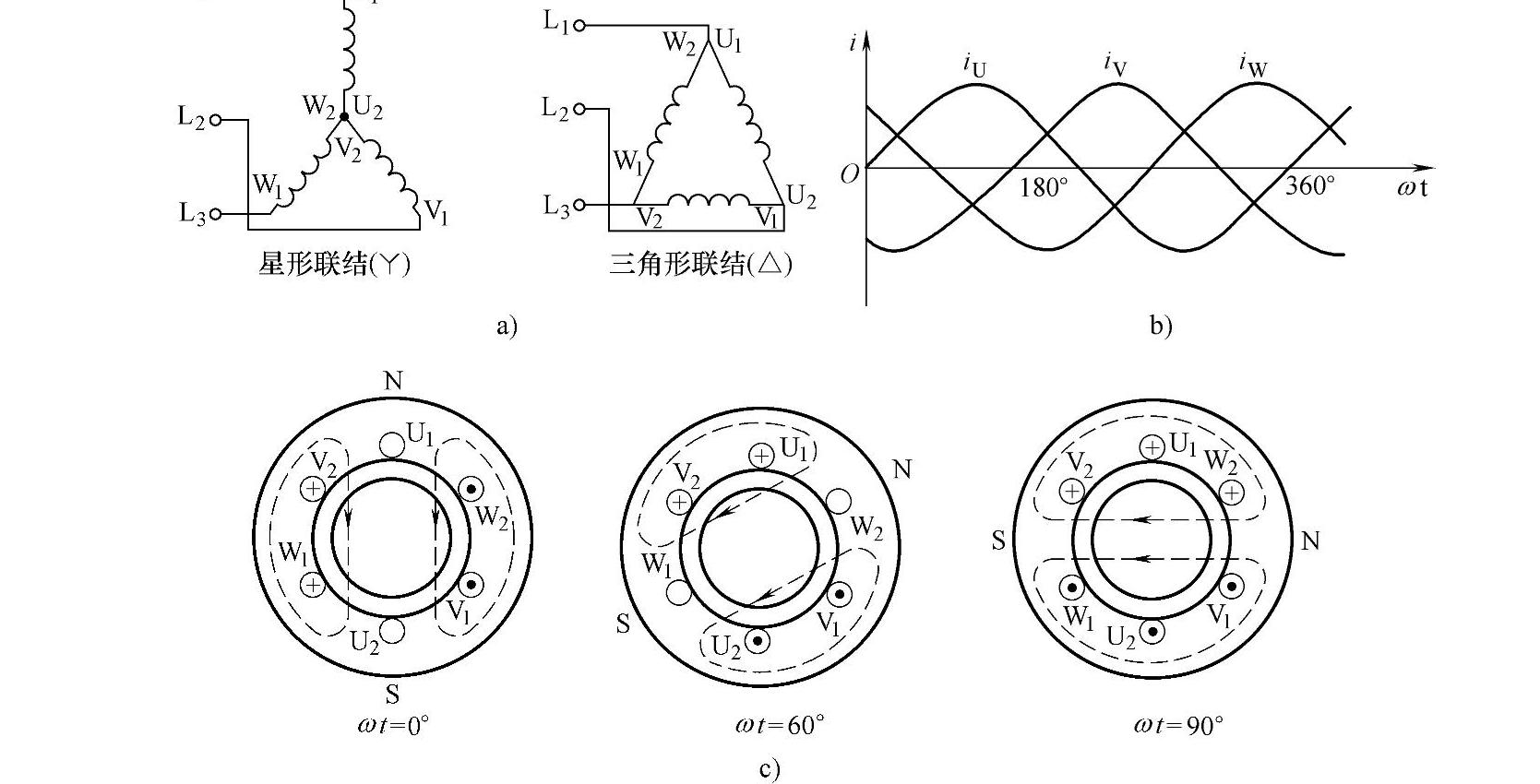
异步电动机的工作原理如图1-6所示。当定子接三相对称电源后,电动机内便形成圆形旋转磁场,如图1-7所示。设其方向为顺时针旋转,假设速度为n0。若转子不转,转子笼型导条与旋转磁场有相对运动,转子导条中便感应有电动势e,方向由右手定则确定。由于转子导条彼此在端部短路,于是导条中便有感应电流,不考虑电动势与电流的相位差时,电流方向同电动势方向。这样,载流导条就在磁场中感生电磁力f,形成电磁转矩T,用左手定则确定其方向,如图1-7所示。转子在方向与旋转磁场同方向的力f(电磁转矩T)的作用下,便沿着该方向跟随着旋转磁场旋转起来。
转子旋转后,假设其转速为n,只要n<n0,转子导条与磁场之间仍有相对运动,就产生与转子不转时相同方向的电动势、电流及受力f,电磁转矩T仍旧为顺时针方向,转子继续旋转,最终稳定运行在电磁转矩T与负载转矩TL相平衡的状况下。
异步电动机内部磁场的旋转速度n0被称作同步转速。在电动机运行时,电动机轴输出机械功率,异步电动机的实际转速n总是低于旋转磁场转速n0,也就是说转子的旋转速度n总是与同步转速n0不等,故异步电动机的名称由此而来。另外,由于转子电流的产生和电能的传递是基于电磁感应现象,故异步电动机又称为感应电动机。
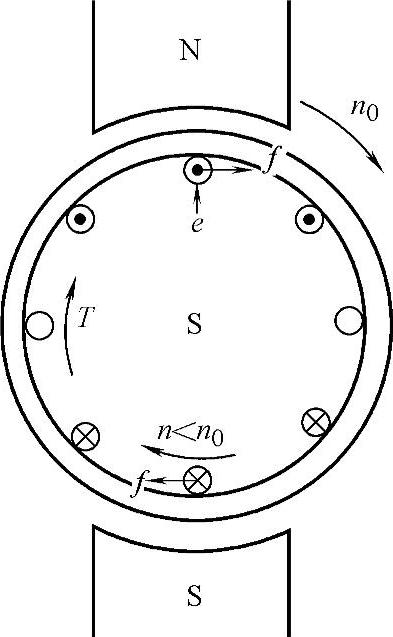
图1-6 异步电动机的工作原理
 (https://www.xing528.com)
(https://www.xing528.com)
图1-7 三相交流异步电动机圆形旋转磁场的产生
a)定子接法 b)三相对称电源波形 c)圆形旋转磁场的产生
异步电动机的同步转速n0与定子绕组磁极对数P(等于磁极数的一半)成反比,与定子侧电源频率f1成正比(对于交流电动机其定子侧的物理量习惯用下标1或者下标s表示,对其转子侧的物理量习惯用下标2或者下标r表示),故有:n0=60f1/P。
带有负载的电动机转子实际转速n要比电动机的同步转速n0低一些,常用转差率来描述异步电动机的各种不同运行状态。转差率s定义为:s=(n0-n)/n0,故近似有n=n0(1-s)。
当电动机为空载(输出的机械转矩近似为零,忽略摩擦转矩,转速近似为n0时,转差率s近似为零。而当电动机为满负载(产生额定转矩)时,则转差率s一般在1.5%~6%范围内。转子不转时(n0=0),s=1。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。