



在蓝牙的应用中,经常需要使用手机通过无线控制远程对象,例如通过蓝牙控制小车,本节介绍Android手机蓝牙控制智能小车的实现过程。
本节选择的Arduino智能小车为HJduino可编程蓝牙遥控小车机器人,如图10-5所示。
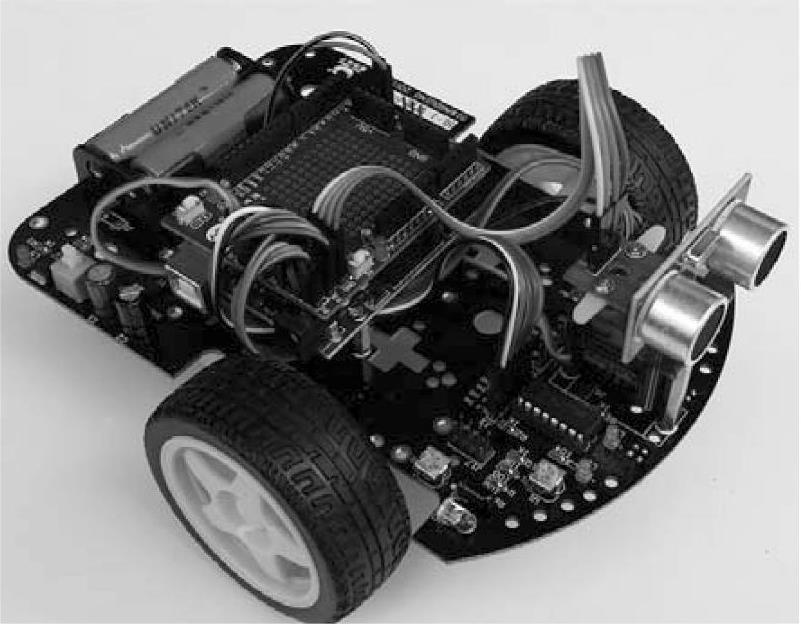
图10-5 Arduino智能小车
智能小车采用的主板为Arduino UNO类型板,如图10-6所示。
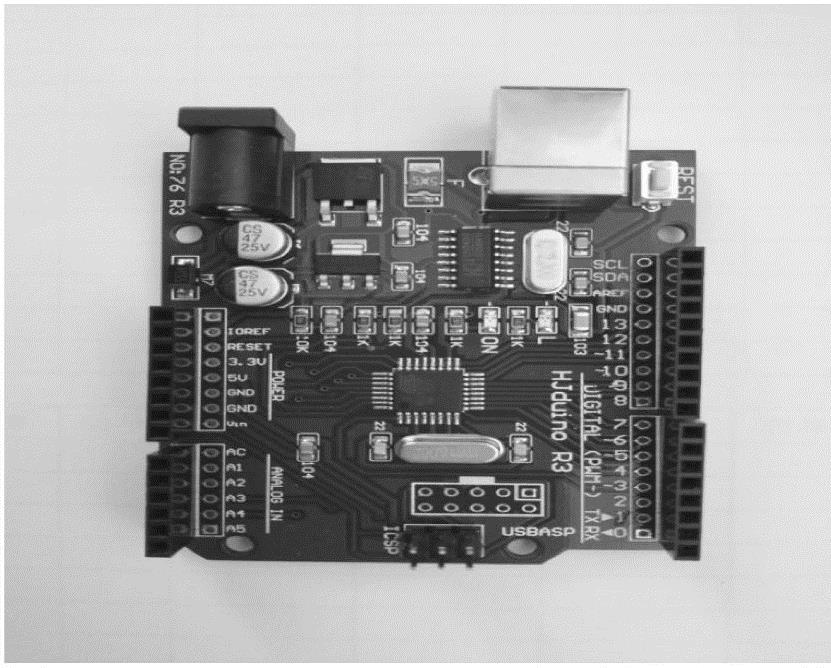
图10-6 智能小车主板
为了更方便地使用智能小车,对Arduino UNO主板的引脚进行扩展,如图10-7所示。其中,P4口接蓝牙,P4口的引脚为VCC、GND、TXD、RXD。

图10-7 智能小车扩展板
智能小车的蓝牙模块为HC-05蓝牙模块,支持无线蓝牙串口透传,它的四个引脚为VCC、GND、TXD、RXD,分别连接到P4口的对应引脚,如图10-8所示。
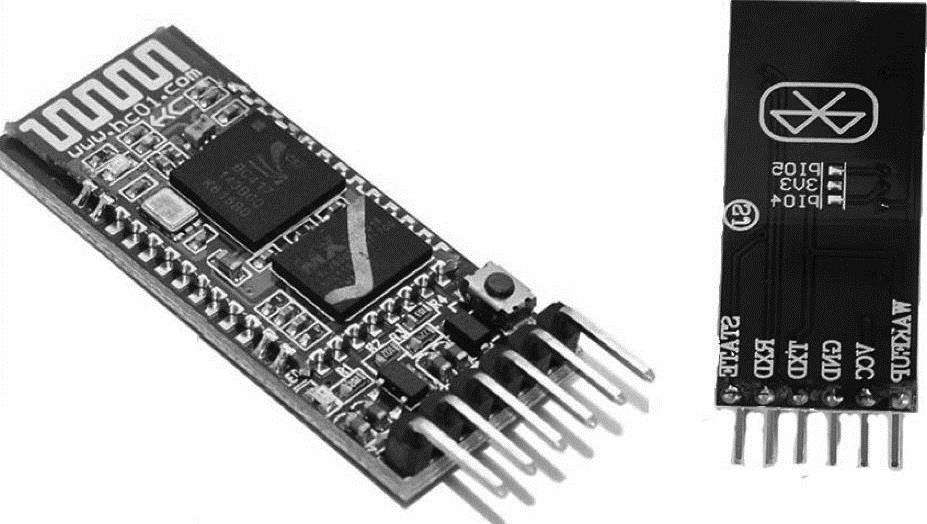
图10-8 HC-05蓝牙模块
智能小车的HC-05蓝牙模块与扩展板的连接如图10-9所示。

图10-9 智能小车的HC-05蓝牙模块与扩展板的连接
手机控制智能小车的结构图如图10-10所示

图10-10 手机控制智能小车的结构图
智能小车控制协议如表10-1所示。
表10-1 智能小车控制协议

下面是手机端的实现方法,新建项目Blue_Control,操作步骤如下。
(1)在AndridManifest.xml文件中增加权限,代码如下。

(2)启动界面布局文件activity_main.xml,内容如下。(https://www.xing528.com)


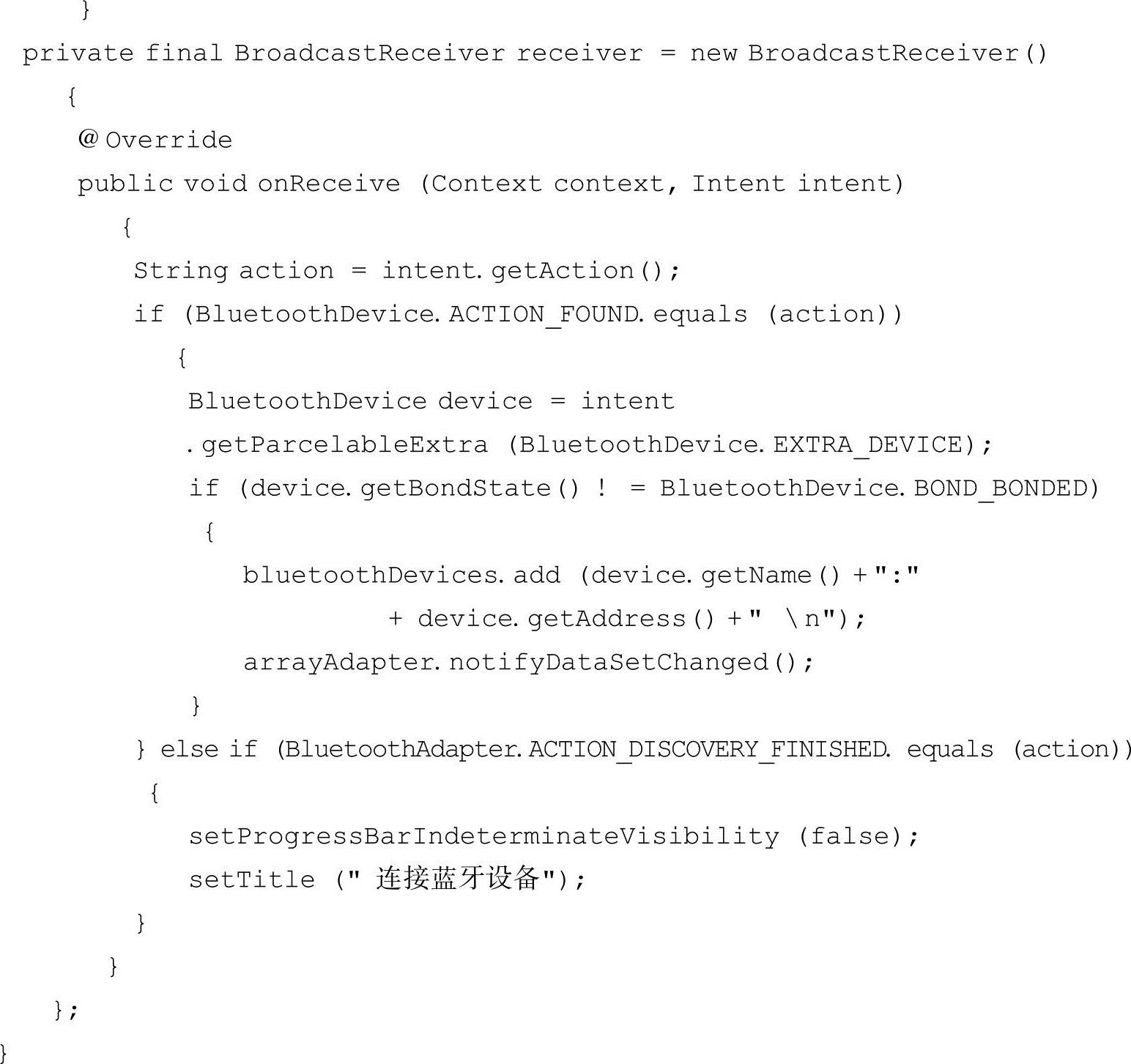
(3)布局文件activity_main.xml对应的处理文件MainActivity.java的代码如下。


(4)第二界面布局文件kongzhi.xml的内容如下。


(5)第二界面布局文件kongzhi.xml对应的处理文件Lanyakongzhi.java的内容如下。








(6)执行结果如图10-11所示。

图10-11 Android蓝牙控制小车执行结果
基于安全性考虑,设置开启蓝牙可被搜索后,Android系统会默认给出120秒的时间,其他设备可以在这120秒内搜索到它。
Android智能手机控制智能小车的过程,总体来说就是先进行蓝牙连接,然后通过蓝牙传送控制命令。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。