



在生产中往往需要有稳定的压力、温度、流量、液位或转速,以此作为保证产品质量、提高生产效率、满足工艺要求的前提,这就要用到变频器的PID控制功能。
所谓PID控制,就是在一个闭环控制系统中,使被控物理量能够迅速而准确地无限接近于控制目标的一种手段。PID控制功能是变频器应用技术的重要领域之一,也是变频器发挥其卓越效能的重要技术手段。
1.PID控制的实现
(1)PID的反馈逻辑
各种变频器的反馈逻辑称谓各不相同,系统设计时应以所选用变频器的说明书介绍为准。所谓反馈逻辑,是指被控物理量经传感器检测到的反馈信号对变频器输出频率的控制极性。例如中央空调系统中,用回水温度控制调节变频器的输出频率和水泵电动机的转速。冬天制热时,如果回水温度偏低,反馈信号减小,说明房间温度低,要求提高变频器输出频率和电动机转速,加大热水的流量;而夏天制冷时,如果回水温度偏低,反馈信号减小,说明房间温度过低,可以降低变频器的输出频率和电动机转速.减少冷水的流量。由上可见,同样是温度偏低,反馈信号减小,但要求变频器的频率变化方向却是相反的。
(2)打开PID功能
要实现闭环的PID控制功能,首先应将PID功能预置为有效。具体方法有两种:一是通过变频器的功能参数码预置;二是由变频器的外接多功能端子的状态决定。大部分变频器兼有上述两种预置方式,但少数品牌的变频器只有其中的一种方式。
在一些控制要求不十分严格的系统中,有时仅使用PI控制功能、不启动D功能就能满足需要,这样的系统调试过程比较简单。
(3)目标信号与反馈信号
欲使变频系统中的某一个物理量稳定在预期的目标值上,变频器的PID功能电路将反馈信号与目标信号不断地进行比较,并根据比较结果来实时地调整输出频率和电动机的转速。所以,变频器的PID控制至少需要两种控制信号:目标信号和反馈信号。这里所说的目标信号是某物理量预期稳定值所对应的电信号,亦称目标值或给定值;而该物理量通过传感器测量到的实际值对应的电信号称为反馈信号,亦称反馈量或当前值。
(4)目标值给定
如何将目标值(目标信号)的命令信息传送给变频器,各种变频器选择了不同的方法,而归结起来大体上有如下两种方案:一是自动转换法,即变频器预置PID功能有效时,其开环运行时的频率给定功能自动转为目标值给定;二是通道选择法。
以上介绍了目标信号的输入通道,接着要确定目标值的大小。由于目标信号和反馈信号通常不是同一种物理量。难以进行直接比较,所以大多数变频器的目标信号都用传感器量程的百分数来表示。例如,某储气罐的空气压力要求稳定在1.2MPa,压力传感器的量程为2MPa,则与1.2MPa对应的百分数为60%,目标值就是60%。而有的变频器的参数列表中,有与传感器量程上下限值对应的参数。目标值即是预期稳定值的绝对值。
(5)反馈信号的连接
各种变频器都有若干个频率给定输入端,在这些输入端子中,如果已经确定一个为目标信号的输入通道,则其他输入端子均可作为反馈信号的输入端。可通过相应的功能参数码选择其中的一个使用。
(6)P、I、D参数的预置与调整
1)比例增益P。变频器的PID功能是利用目标信号和反馈信号的差值来调节输出频率的。一方面,希望目标信号和反馈信号无限接近,即差值很小,从而满足调节的精度;另一方面,又希望调节信号具有一定的幅度,以保证调节的灵敏度。解决这一矛盾的方法就是事先将差值信号进行放大。比例增益P就是用来设置差值信号的放大系数的。任何一种变频器的参数P都给出一个可设置的数值范围,一般在初次调试时,P可按中间偏大值预置或者暂时默认出厂值,待设备运转时再按实际情况细调。
2)积分时间。如上所述,比例增益P越大,调节灵敏度越高,但由于传动系统和控制电路都有惯性,调节结果达到最佳值时不能立即停止,导致“超调”,然后反过来调整,再次超调,形成振荡。为此引入积分环节I,其效果是:使经过比例增益P放大后的差值信号在积分时间内逐渐增大(或减小),从而减缓其变化速度,防止振荡。但积分时间I太长,又会当反馈信号急剧变化时,被控物理量难以迅速恢复。因此,I的取值与拖动系统的时间常数有关。拖动系统的时间常数较小时,积分时间应短些;拖动系统的时间常数较大时,积分时间应长些。
3)微分时间D。微分时间D是根据差值信号变化的速率,提前给出一个相应的调节动作,从而缩短了调节时间,克服因积分时间过长而使恢复滞后的缺陷。D的取值也与拖动系统的时间常数有关,拖动系统的时间常数较小时,微分时间应短些;反之,拖动系统的时间常数较大时,微分时间应长些。
4)P、I、D参数的调整原则。P、I、D参数的预置是相辅相成的,运行现场应根据实际情况进行如下细调:被控物理量在目标值附近振荡,首先加大积分时间I,如仍有振荡,可适当减小比例增益P;被控物理量在发生变化后难以恢复,首先加大比例增益P,如果恢复仍较缓慢,可适当减小积分时间I,还可加大微分时间D。
2.MM440变频器PID控制的实现
(1)MM440变频器的PID
西门子变频器的PID控制属于闭环控制,是使控制系统的被控量迅速而准确地无限接近目标值的一种手段。即实时地将传感器反馈回来的信号与被控量的目标值信号进行比较,以判断是否达到预期的目标,如未达到则根据两者偏差继续调整,直至达到预定的控制目标为止。
MM440变频器内部有PID调节器,调节器将反馈信号与给定值进行比较运算,其结果作为变频器频率指令输送给变频器。利用MM440变频器很方便构成PID闭环控制,MM440变频器PID控制原理简图如图9-16所示。
(2)MM440变频器的PID设定值信号源(P2253)
PID给定源如见表9-19。
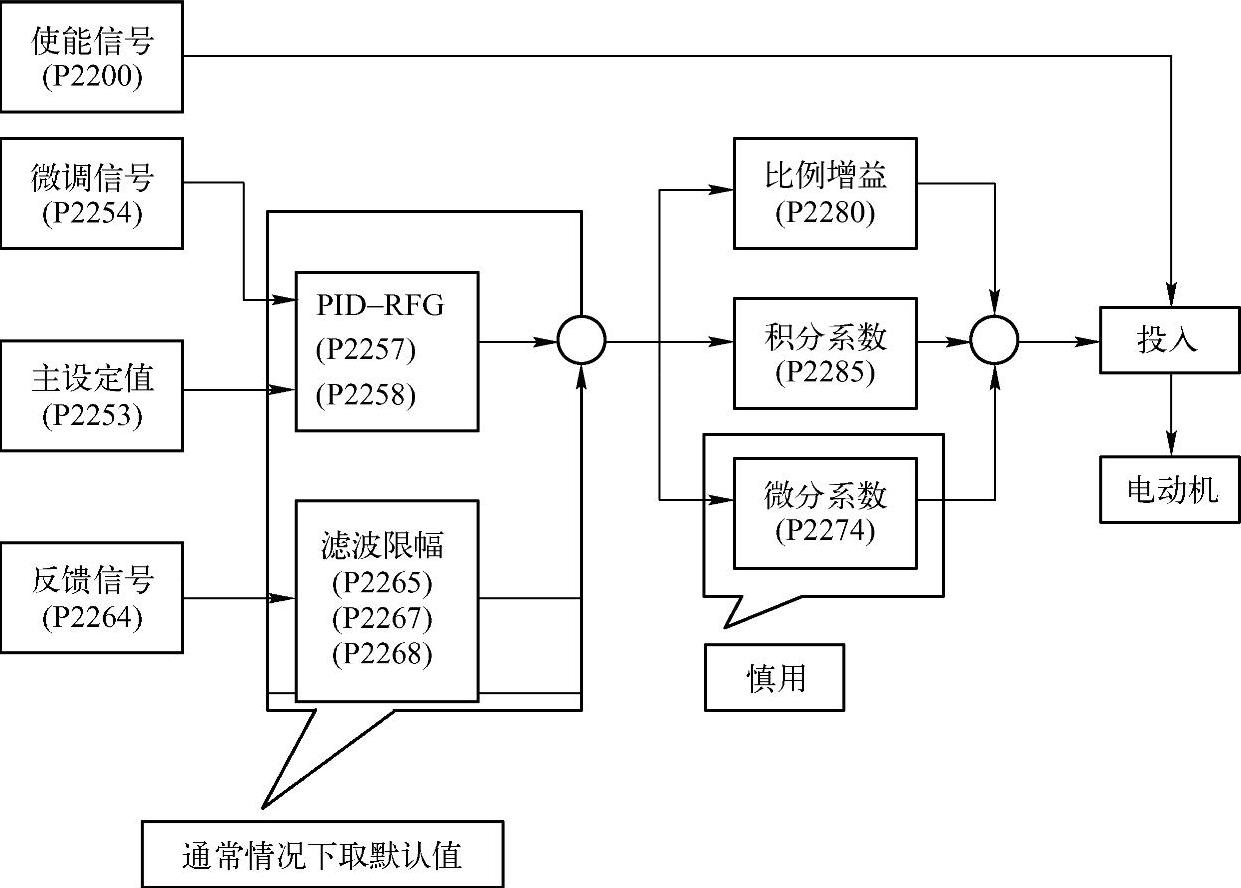
图9-16 MM440变频器PID控制原理简图
表9-19 MM440PID给定源

(3)MM440变频器的反馈通道的设定(P2264)
通过各种传感器、编码器采集的信号或者变频器的模拟量输出信号,均可以作为闭环系统的反馈信号,反馈信号的设定同主通道相同。PID反馈源见表9-20。
表9-20 MM440PID反馈源

3.MM440变频器的PID控制实例
例9-5现有一条供水管道,由MM440变频器拖动水泵供水。要求:保持管道压力在0.9MPa,管道压力由一压力变送器检测,压力变送器的量程为0~1.5MPa,信号为4~20mA。根据以上说明,设置MM440变频器参数,实现控制要求。
(1)主要硬件配置(https://www.xing528.com)
①MM440变频器一台+一台三相异步电动机。
②一支压力传感器。
③相关元器件及工具。
(2)步骤
1)硬件接线图。图9-17所示为面板设定目标值时的PID控制端子接线图,模拟输入端AIN2接入反馈信号0~20mA,数字量输入端DIN1接入带锁按钮SB1控制变频器的启/停,给定目标值由BOP面板(▲▼)键设定。
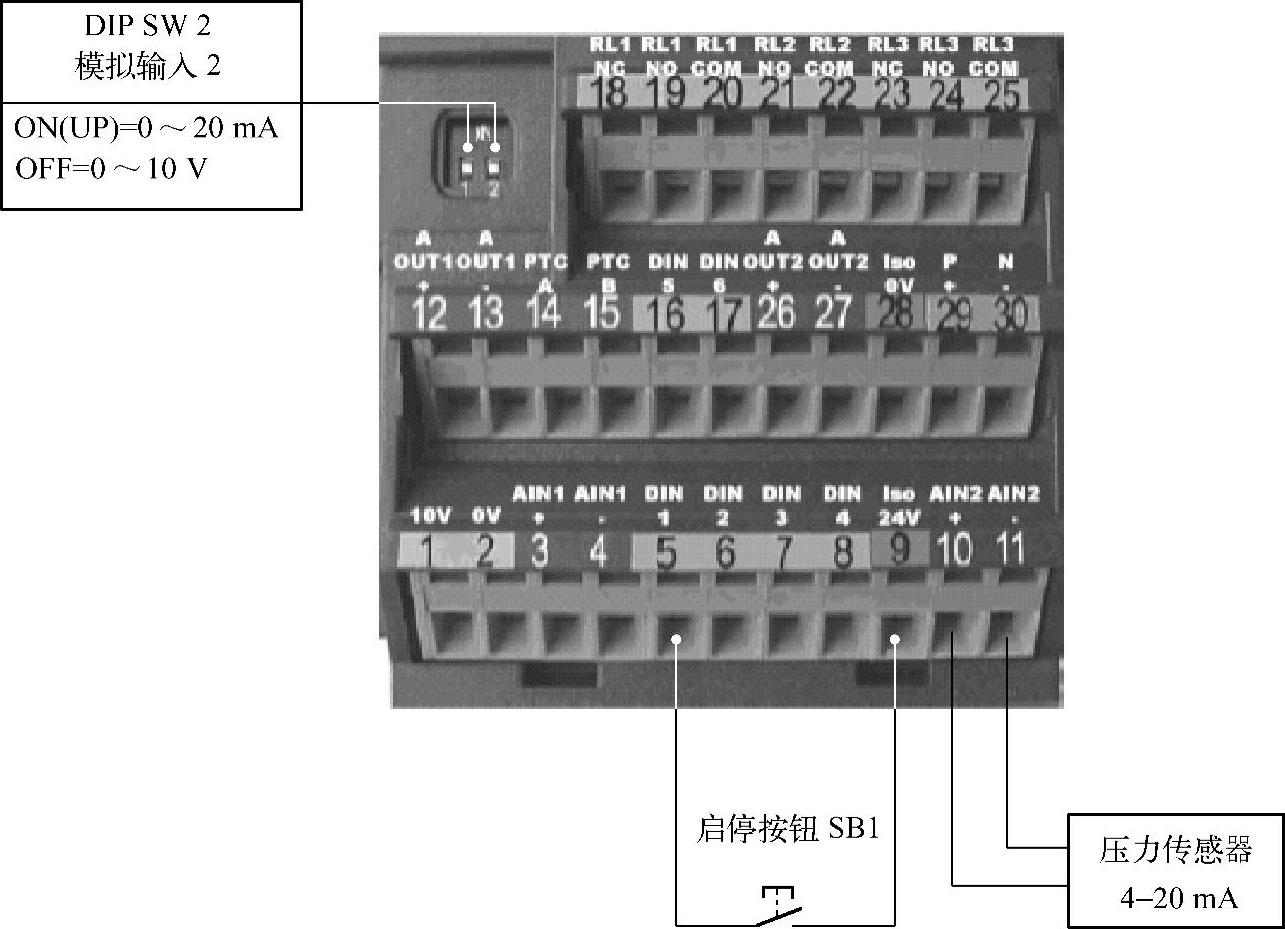
图9-17 硬件接线图
2)参数设置。检查线路正确后,合上变频器电源空气开关QS。
参数复位。恢复变频器工厂默认值,设定P0010=30和P0970=1,按下<P>键,开始复位,复位过程大约为3s,这样就保证了变频器的参数恢复到工厂默认值。
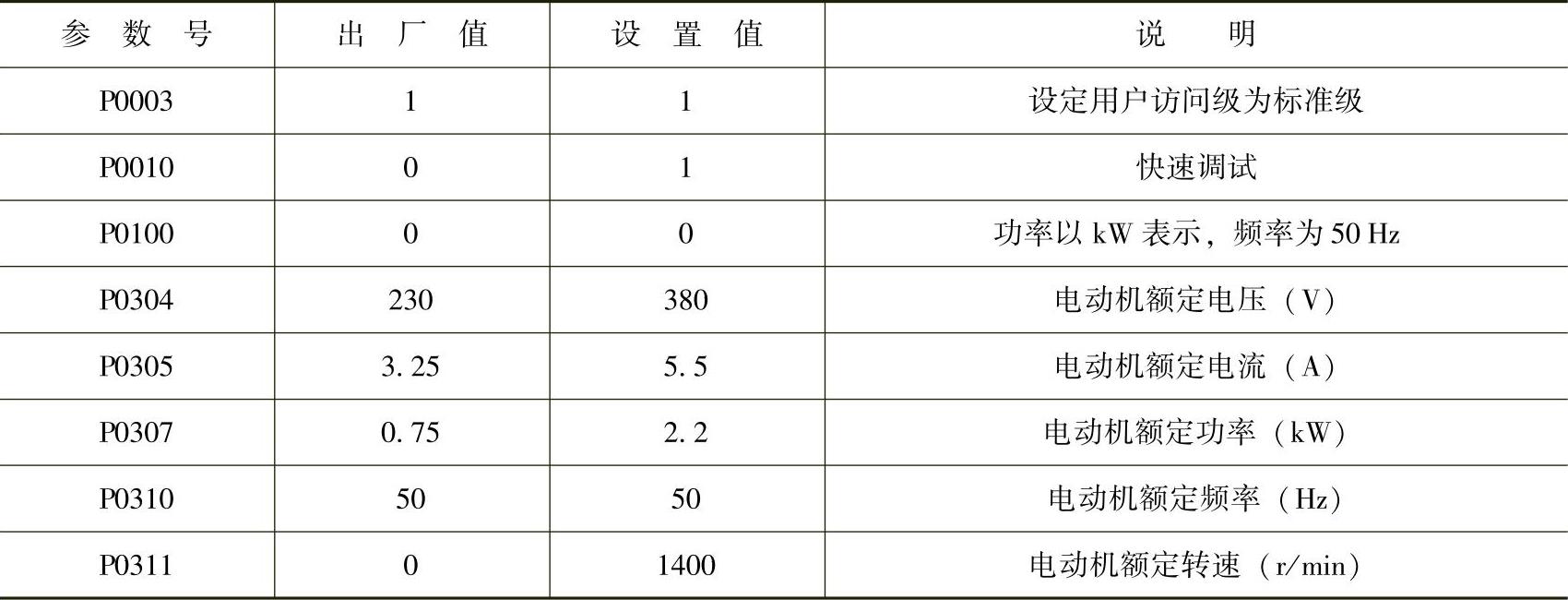
设置电动机参数,见表9-21。电动机参数设置完成后,设P0010=0,变频器当前处于准备状态,可正常运行。
表9-21 电动机参数设置
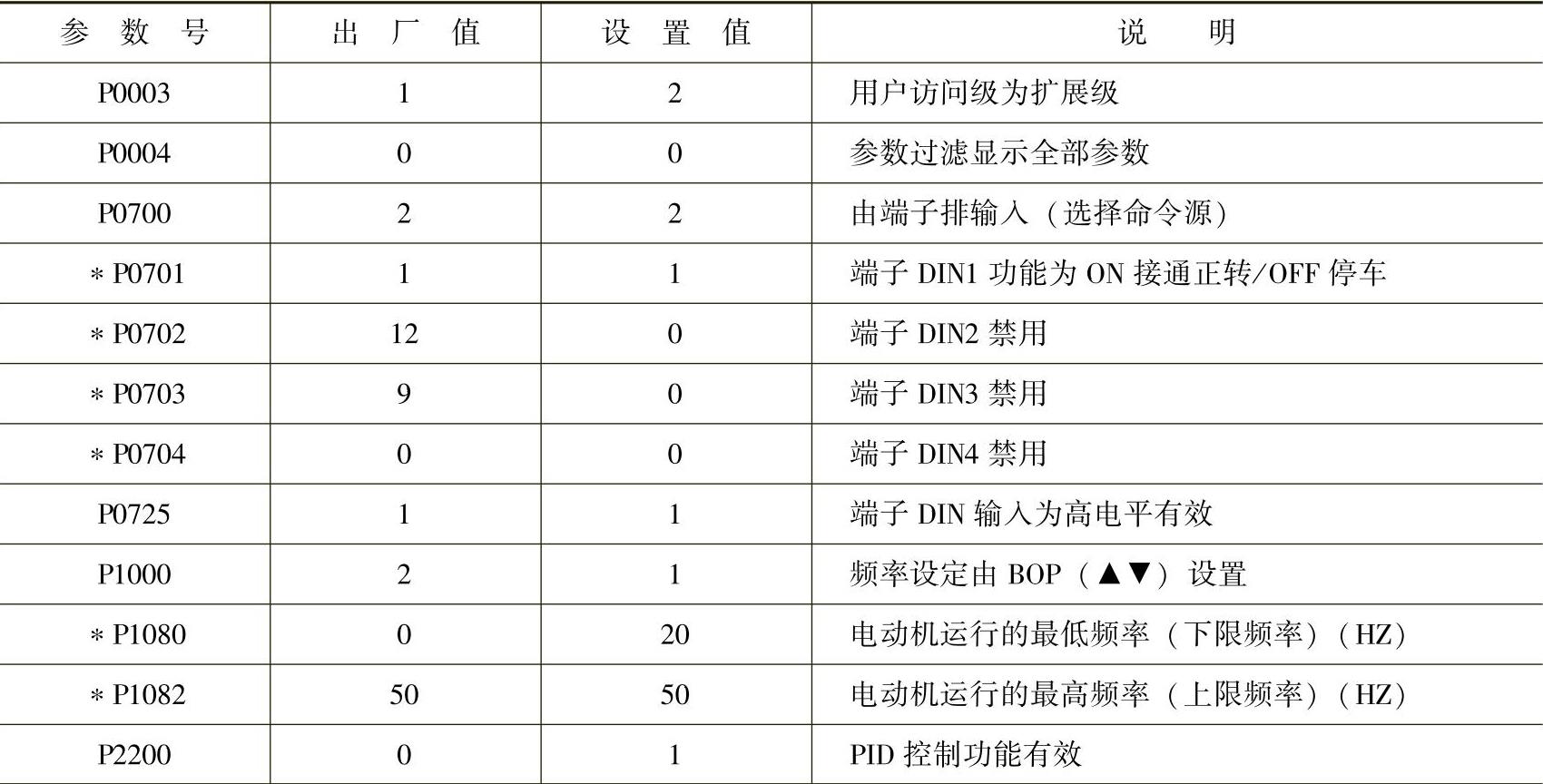
设置控制参数,见表9-22。
表9-22 控制参数表
注:表9-22中,标“*”号的参数可根据用户的需要改变,以下同。
设置目标参数,见表9-23。
表9-23 目标参数表
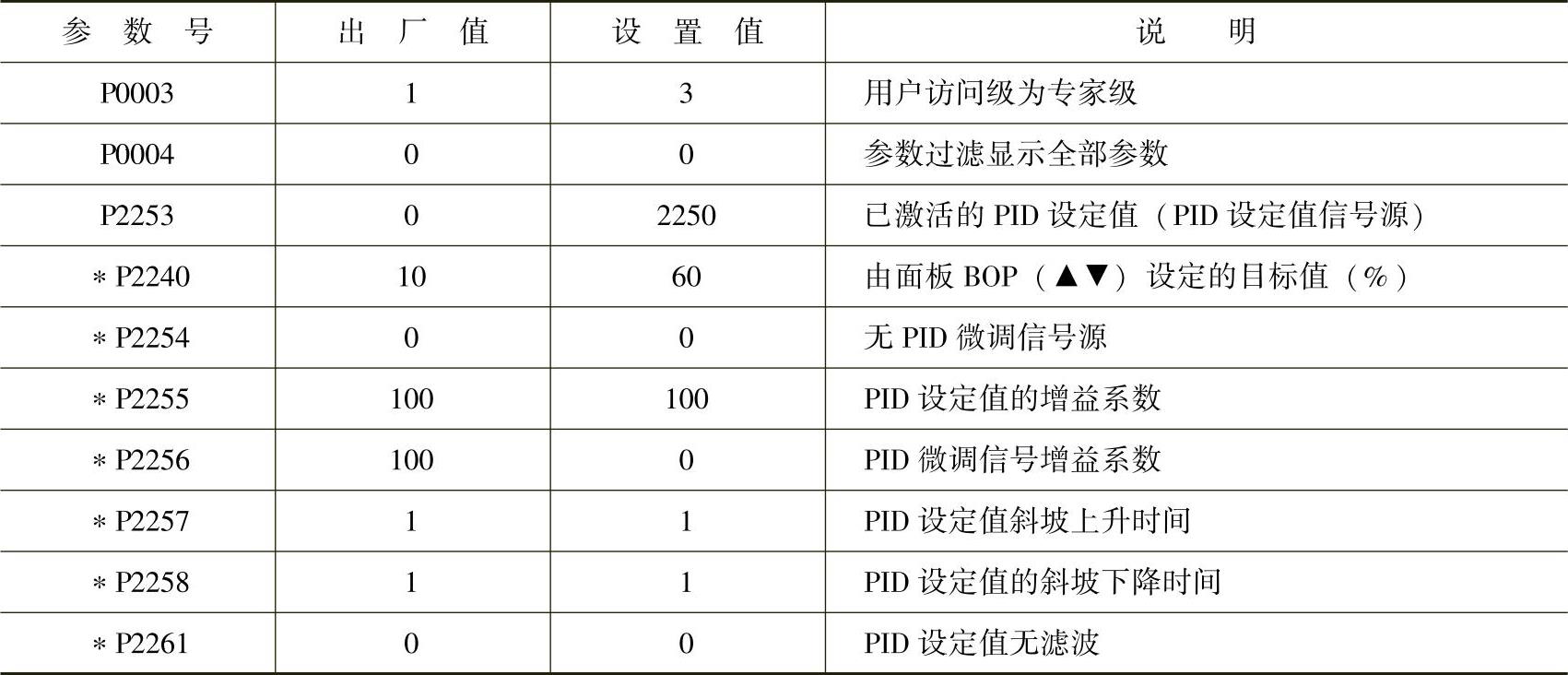
P2240参数设置说明:
因为要控制管道压力为0.9MPa,0.9MPa就为控制的目标值,而0.9MPa对于压力变送器的量程0~1.5MPa来讲,为0.9/1.5=0.6,化为百分比为60%。
P2240参数功能为面板BOP键盘设定目标值,所以P2240参数就设置为60,因为P2240的单位是%,所设置的60就是60%
由于传感器的精度问题,计算值和实际值存在一定误差。最准确的方法是,当压力为0.9MPa时查看参数r2266的值,此值就是P2240最准确的值。
P2280和P2285的设定值很关键,维持罐内的压力始终是0.9MPa基本上是不可能的,但是能不能稳定在0.9MPa就要看这两个参数的设定了。
当P2232=0允许反向时,可以用面板BOP键盘上的(▲▼)键设定P2240值为负值。
设置反馈参数,见表9-24。
表9-24 反馈参数表

设置PID参数,见表9-25。
表9-25 PID参数表

3)变频器运行操作。按下带锁按钮SB1时,变频器数字输入端DIN1为“ON”,变频器启动电动机。当反馈的电流信号发生改变时,将会引起电动机的速度发生变化。
若反馈的电流信号小于目标值12mA(即P2240值),变频器将驱动电动机升速;电动机速度上升会引起反馈的电流信号变大。当反馈的电流信号大于目标值12mA时,变频器又将驱动电动机降速,从而又使反馈的电流信号变小;当反馈的电流信号小于目标值12mA时,变频器又将驱动电动机升速。如此反复,能使变频器达到一种动态平衡状态,变频器将驱动电动机以一个动态稳定的速度运行。
如果需要,则目标设定值(P2240值)可直接通过按操作面板上的(▲▼)键来改变。当设置P2231=1时,由(▲▼)键改变了的目标设定值将被保存在内存中。
放开带锁按钮SB1,数字输入端DIN1为“OFF”,电动机停止运行。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。