



例7-6现有一套送料小车系统,分别在工位一、工位二、工位三这三个地方来回自动送料,小车的运动由一台交流电动机进行控制。在三个工位处,分别装置了三个传感器SQ1、SQ2、SQ3用于检测小车的位置。在小车运行的左端和右端分别安装了两个行程开关SQ4、SQ5,用于定位小车的原点和右极限位点。其结构示意图,如图7-38所示。
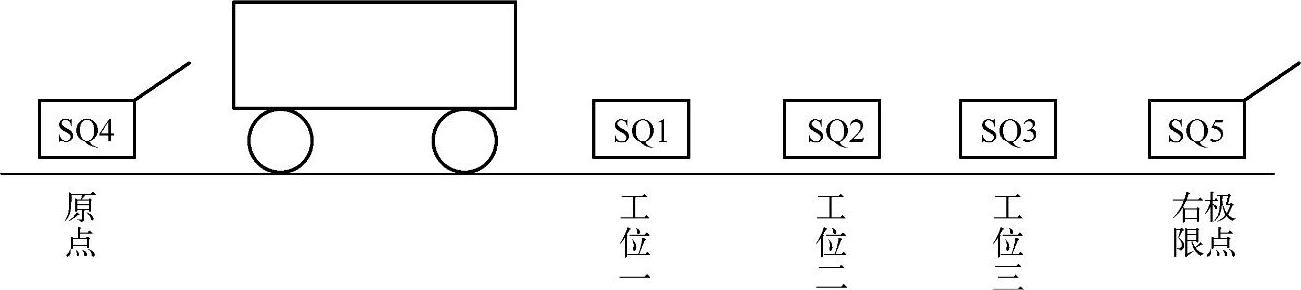
图7-38 结构示意图
1.控制要求
1)当系统上电时,无论小车处于何种状态,首先回到原点准备装料,等待系统的启动。
2)当系统的手/自动转换开关打开自动运行挡时,按下启动按钮SB1,小车首先正向运行到工位一的位置,等待10s卸料完成后正向运行到工位二的位置,等待10s卸料完成后正向运行到工位三的位置,停止5s后接着反向运行到工位二的位置,停止5s后再反向运行到工位一的位置,停止5s后再反向运行到原点位置,等待下一轮的启动运行。
3)当按下停止按钮SB2时,系统停止运行,如果电动机停止在某一工位,则小车继续停止等待;当小车正运行在去往某一工位的途中,则当小车到达目的地后再停止运行。再次按下启动按钮SB1后,设备按余下的流程继续运行。
4)当系统按下急停按钮SB5时,小车立即要求停止工作,直到急停按钮取消时,系统恢复到当前状态。
5)当系统的手/自动转换开关SA1打到手动运行挡时,可以通过手动按钮SB3、SB4控制小车的正/反向运行。
2.PLC原理图
根据控制要求,绘制PLC控制原理图,如图7-39所示。
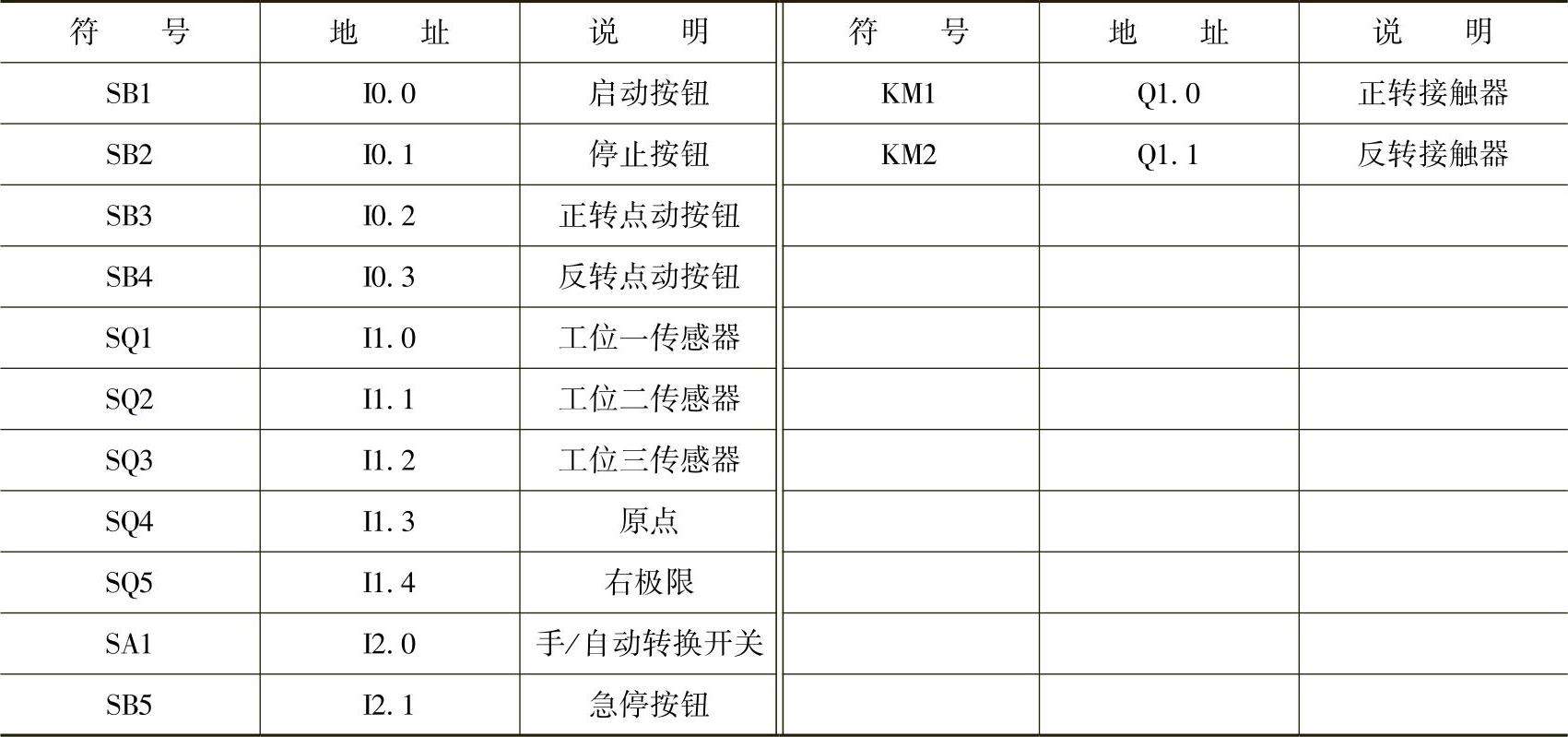
3.分配I/O分配表
根据PLC控制原理图,分配PLC控制的I/O分配表,见表7-4。
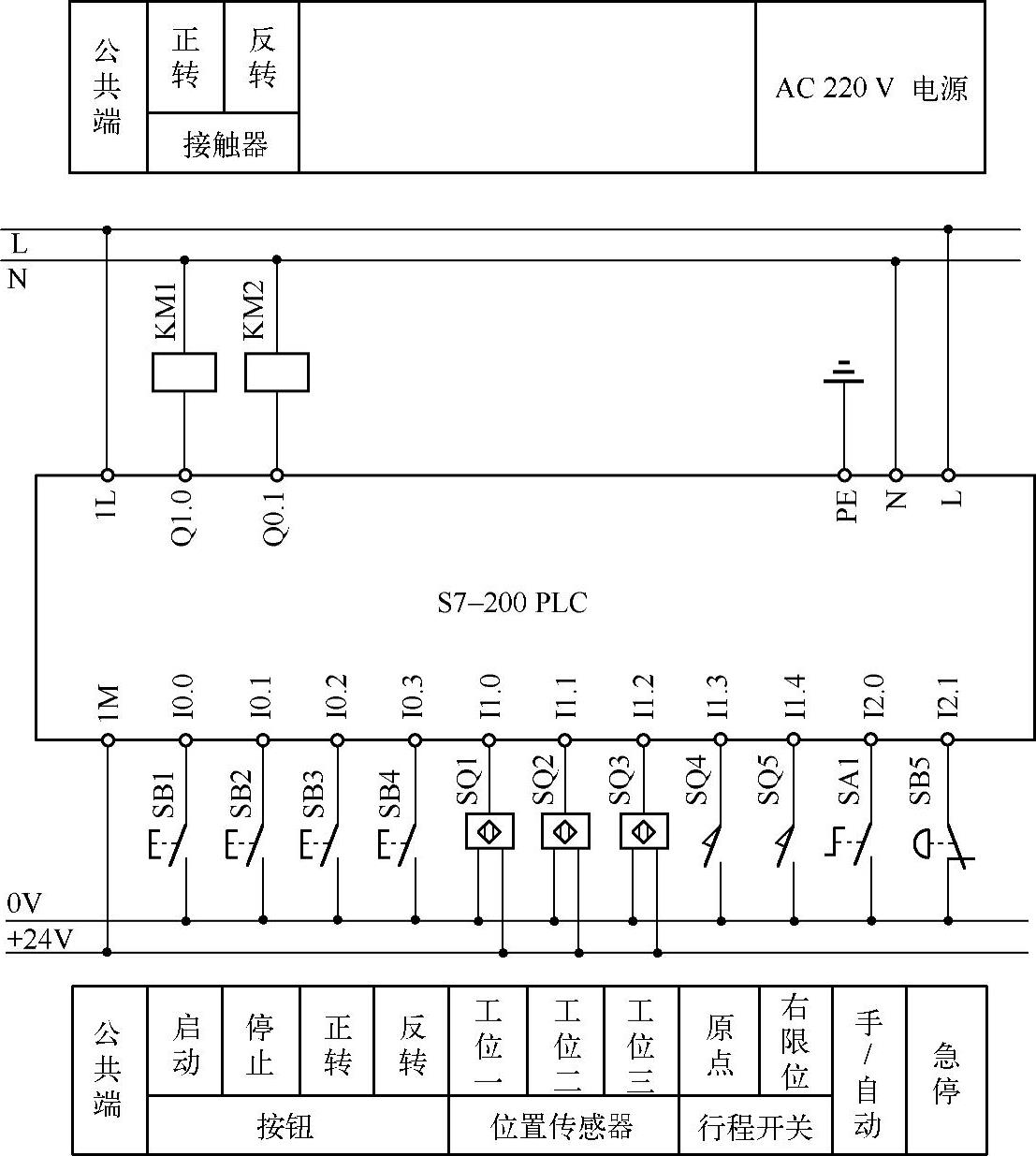
图7-39 PLC控制原理图(https://www.xing528.com)
表7-4 I/O分配表
4.功能图
根据控制要求,分析绘制控制功能图,如图7-40所示。
5.编写程序
根据功能图,编写程序梯形图,如图7-41所示。
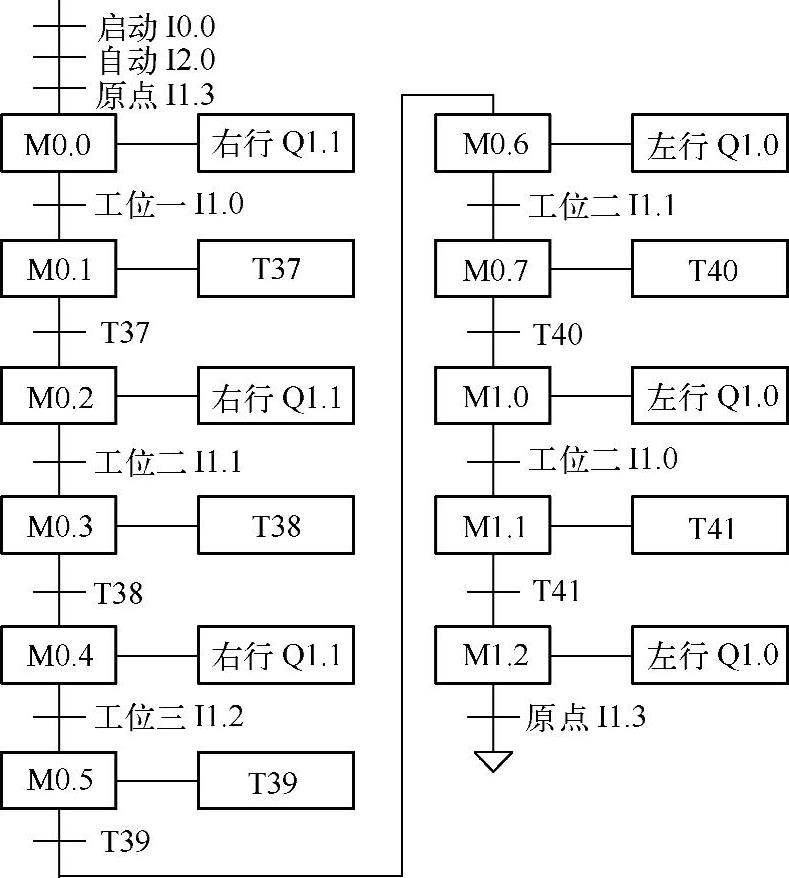
图7-40 控制功能图
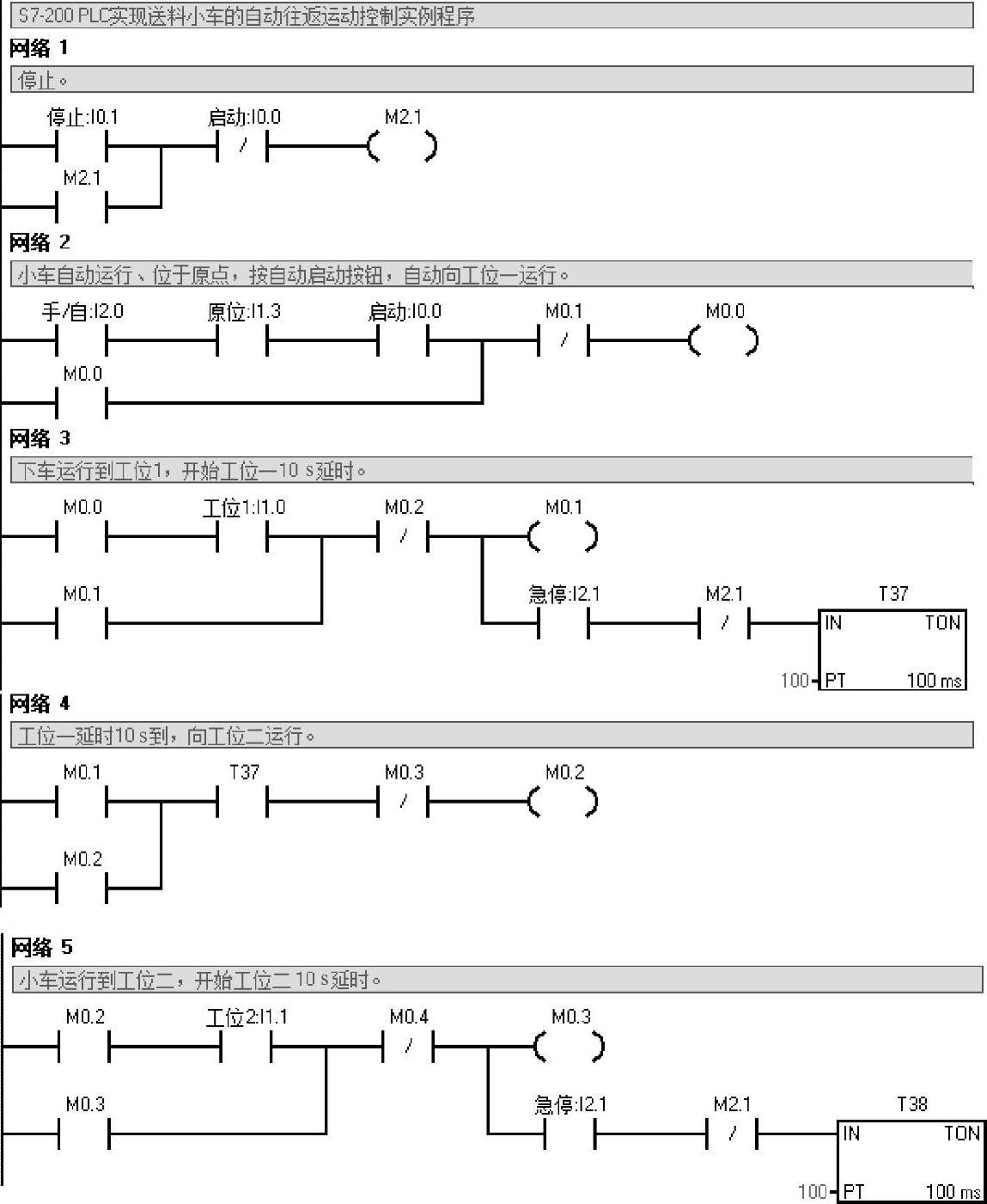
图7-41 梯形图
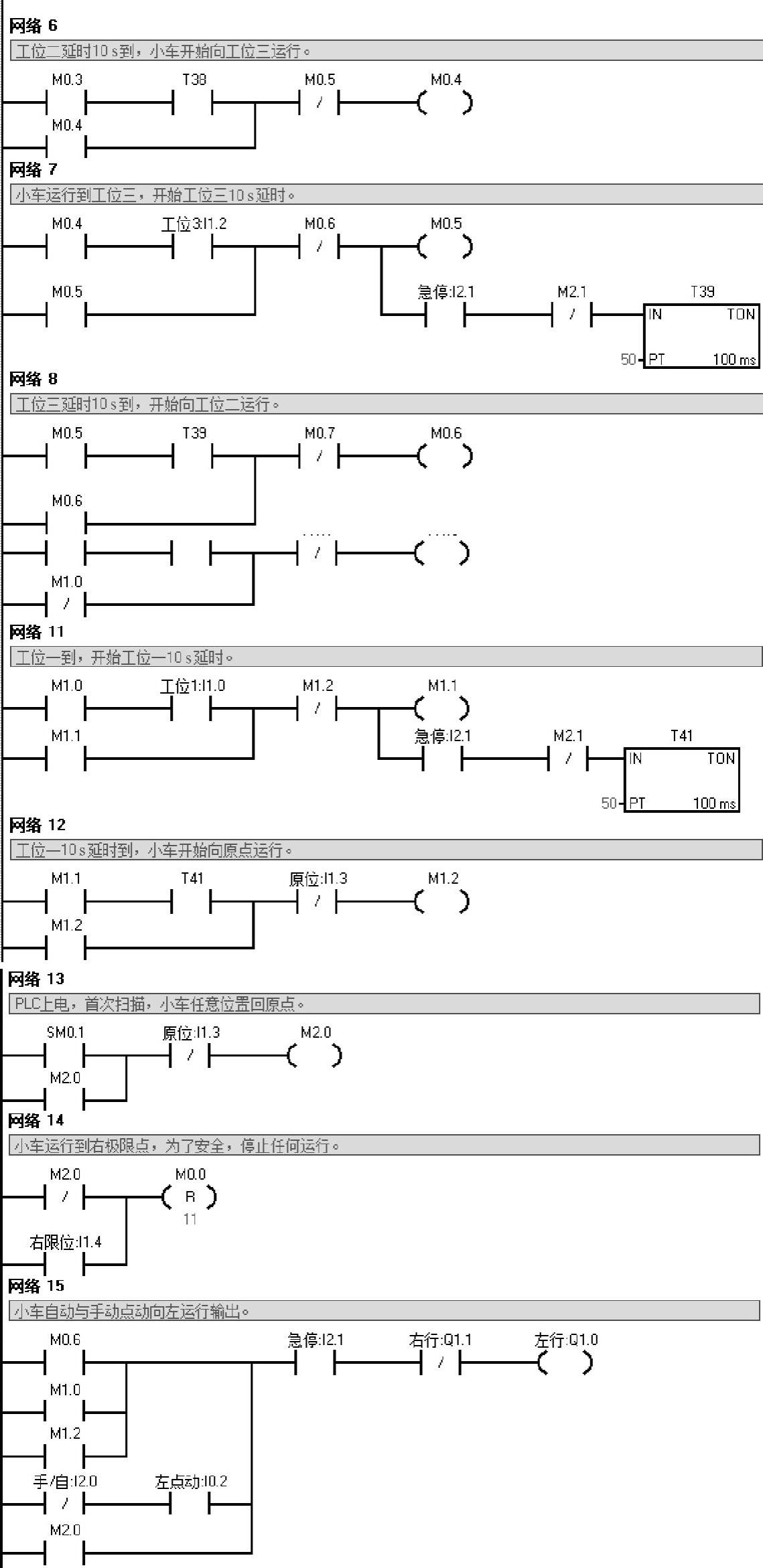
图7-41 梯形图(续)
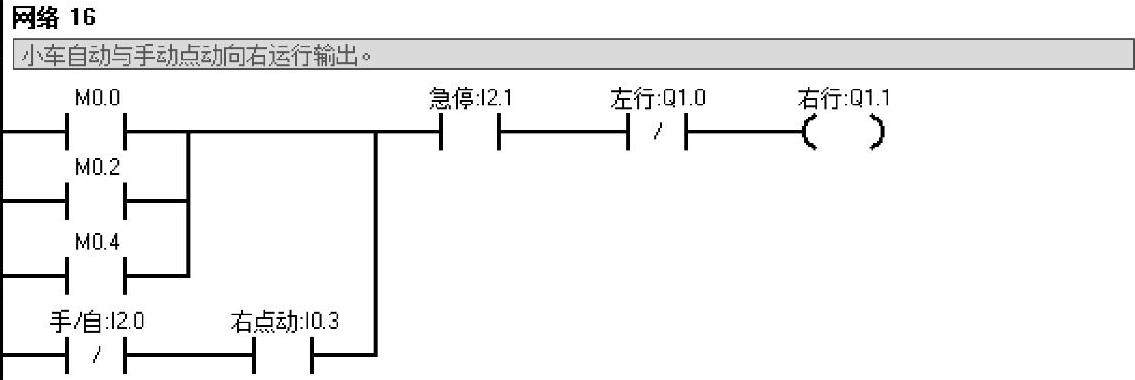
图7-41 梯形图(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。