



非线性问题可分为三大类:几何非线性、材料非线性和状态非线性,下面分别加以介绍。
9.1.2.1 几何非线性
如果结构有大变形,其变化的几何形状可能会引起结构的非线性响应。如图9-2所示的钓鱼竿,在轻微的垂向作用下会产生很大的变形。随着垂向载荷的增加,杆不断弯曲以致于动力臂明显地减小,导致杆端显示出在较高载荷下不断增长的刚性。一般来说,随着位移增长,一个有限单元已移动的坐标可以以多种方式改变结构的刚度(两种方式改变:如果这个单元的形状改变,它的单元刚度将改变;如果这个单元的取向改变,它的局部刚度转化到全局部件的刚度也将改变),这类问题总是非线性的,需要进行迭代以获得一个有效的解。
小变形和小应力应变分析假定位移小到足够忽略所得到的刚度改变。这种刚度不变假定意味着使用基于最初几何形状的机构刚度的一次迭代,就可以以计算出小变形分析中的位移。什么时候使用小变形和小应变依赖于特定分析中要求的精度等级。相反,大应变分析说明由单元的形状和取向改变导致的刚度改变。因为刚度受位移影响,反之亦然,所以在大应变分析中需要迭代求解来得到正确的位移。
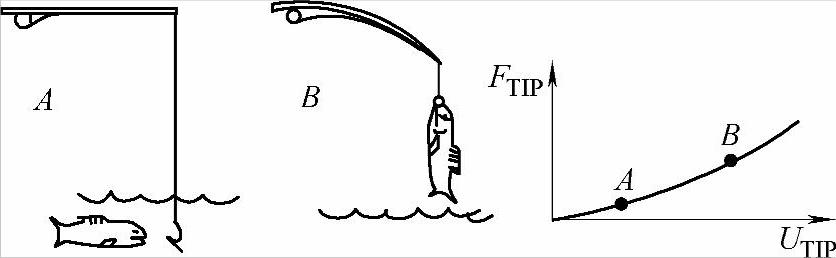
图9-2 钓鱼竿几何非线性
9.1.2.2 材料非线性分析
非线性的应力-应变关系是结构非线性的常见原因。许多因素可以影响材料的应力-应变性质,包括加载历史(如在弹-塑响应状态下)、环境状况(如温度)、加载的时间总量(如在蠕变响应状态下)。ANSYS软件的材料非线性分析能力包括弹塑性分析、超弹分析、蠕变分析等。本书只介绍弹塑性分析。
塑性是指在某种给定载荷下,材料产生永久变形的特性。对大多的工程材料来说,当其应力低于比例极限时,应力-应变关系是线性的。另外大多数材料在其应力低于屈服点时,表现为弹性行为,也就是说,当把载荷移走时,其应变也完全消失。由于屈服点和比例极限相差很小,因此在ANSYS程序中,假定它们相同。在应力-应变曲线中,低于屈服点的称为弹性部分,超过屈服点的称为塑性部分,或者称为应变强化部分。弹塑性分析就是既考虑弹性部分又考虑塑性区域的材料特性分析。(https://www.xing528.com)
9.1.2.3 状态非线性分析
许多普通结构表现出一种与状态相关的非线性行为。例如:一根只能拉伸的电缆可能是松散的,也可能是绷紧的;轴承套可能是接触的,也可能是不接触的;冻土可能是冻结的,也可能是融化的。这些系统的刚度由于系统状态的改变在不同的值之间突然变化。状态改变可能和载荷直接有关(如电缆情况中),也可能由某种外部原因引起(如在冻土中的紊乱热力学条件)。
接触是一种很普通的非线性行为。接触是状态变化非线性类型中一个特殊而且重要的子集。接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实际有效的计算,理解问题的特性和建立合理的模型很重要。接触问题存在两个较大的难点:其一,在求解问题之前,不知道接触区域,表面之间是接触还是分开是未知的,突然变化的,随载荷、材料、边界条件和其他因素而定;其二,大多的接触问题需要计算摩擦,摩擦有几种,都是非线性的,且摩擦使问题的收敛性变得困难。接触问题分为两种基本类型:刚体-柔体的接触、柔体-柔体的接触。ANSYS软件支持点-点、点-面、面-面等接触方式。
(1)点-点接触分析 点-点接触单元主要用于模拟点-点的接触行为,为了使用点-点接触单元,需要预先知道接触位置,这类接触问题只能适用于接触面之间有很小相对滑动的情况(即使在几何非线性情况下)。如果两个面上的节点一一对应,相对滑动可以忽略不计,两个面扰度保持小量,那么可以用点-点接触单元来求解面-面接触问题。过盈装配问题是一个用点-点的接触来模拟面-面接触的典型例子。ANSYS软件中提供了2种点-点接触单元。
1)CONTACT12:二维点-点的接触单元。这个单元是通过总体坐标系X-Y平面内的两个节点来定义的,可以用于二维平面应力、平面应变和轴对段分析中。
2)CONTACT52:三维点-点的接触单元。
(2)点-面接触分析 点-面接触单元主要用于给点-面的接触行为建模,如两个梁的相互接触。如果通过一组节点来定义接触面,生成多个单元,那么可以通过点-面的接触单元来模拟面-面的接触问题,面既可以是刚性体也可以是柔性体。这类接触问题的一个典型例子是把插头插到插座里。ANSYS中点-面的接触是通过跟踪一个表面(接触面)上的点相对于另一表面(目标面)上的线或面的位置来表示,程序使用接触单元来跟踪两个面的相对位置,接触单元的形状为三角形、四面体或锥形,其底面由目标面上的节点组成,而顶点为接触面上的节点。Contact48和Contact49都是点-面的接触单元,Contact26用来模拟柔性点-刚性面的接触。对有不连续的刚性面的问题,不推荐采用Contact26,因为可能导致接触的丢失。在这种情况下,Contact48通过使用伪单元算法能提供较好的建模能力。
(3)面-面接触分析ANSYS支持刚性-柔性的面-面的接触单元,刚性面被当做目标面,分别用Targe169和Targe170来模拟二维和三维的目标面,柔性体的表面被当做接触面,用Conta171、Conta172、Conta173、Conta174来模拟。一个目标单元和一个接触单元称为一个“接触对”程序,通过一个共享的实常号来识别“接触对”,为了建立一个“接触对”,要给目标单元和接触单元指定相同的实常号。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。